定位方法、装置、计算机设备和存储介质与流程
本技术涉及导航,特别是涉及一种定位方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着互联网技术的不断发展,众多新型移动设备受到广大人们的追捧,用户在使用移动设备时对位置的需求也越来越高,尤其是在室内导航时,需要更精确的用户定位。目前对于终端在室内进行定位的方式通常是通过多个方向积分累积进行确定,然而,通过多个方向积分进行定位,累积错误较大,进而导致定位精确度降低。
2、因此,目前的定位方法存在定位精确度低的缺陷。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高定位精确度的定位方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种定位方法,所述方法包括:
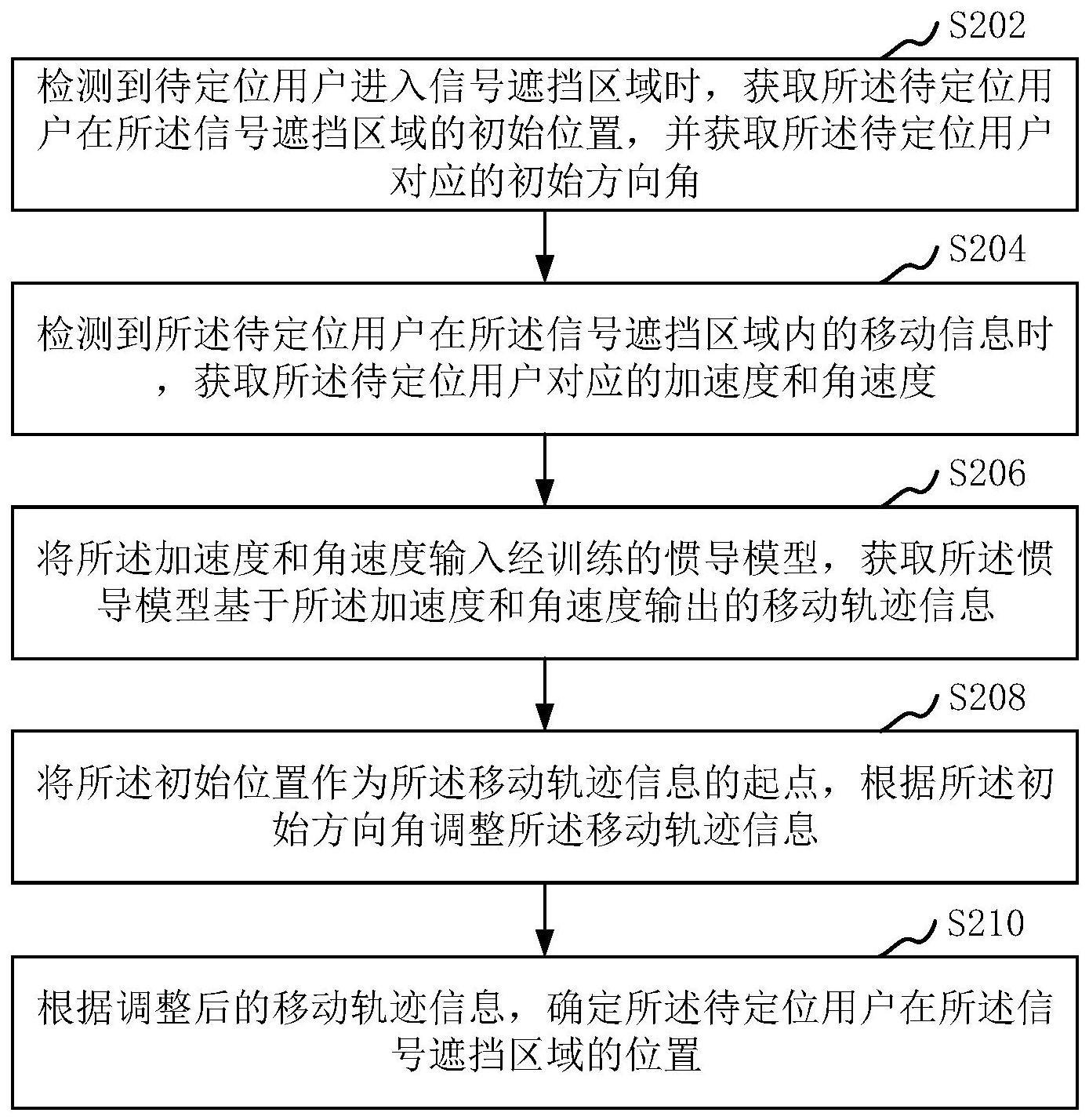
3、检测到待定位用户进入信号遮挡区域时,获取所述待定位用户在所述信号遮挡区域的初始位置,并获取所述待定位用户对应的初始方向角;所述初始方向角基于所述待定位用户在所述初始位置时的设备方向与预设地理方位确定;
4、检测到所述待定位用户在所述信号遮挡区域内的移动信息时,获取所述待定位用户对应的加速度和角速度;
5、将所述加速度和角速度输入经训练的惯导模型,获取所述惯导模型基于所述加速度和角速度输出的移动轨迹信息;
6、将所述初始位置作为所述移动轨迹信息的起点,根据所述初始方向角调整所述移动轨迹信息;
7、根据调整后的移动轨迹信息,确定所述待定位用户在所述信号遮挡区域的位置。
8、在其中一个实施例中,所述将所述加速度和角速度输入经训练的惯导模型,包括:
9、将所述加速度和角速度输入经训练的惯导模型,由所述惯导模型获取所述加速度在各坐标轴方向上的加速度分量,并基于各坐标轴方向的加速度分量确定位置变化信息,以及基于所述角速度确定姿态变化信息;
10、根据所述位置变化信息和所述姿态变化信息,输出移动轨迹信息。
11、在其中一个实施例中,所述加速度包括多个时刻的加速度;
12、所述获取所述加速度在各坐标轴方向上的加速度分量,包括:
13、获取上一时刻的重力转换值与预设系数的第一乘积,以及获取一与所述预设系数的差值;
14、获取上一时刻的加速度在各坐标轴方向上的原始加速度分量,并获取上一时刻的各原始加速度分量与所述差值的第二乘积;
15、根据所述第一乘积与所述第二乘积的和,确定当前时刻的重力转换值;
16、根据当前时刻的重力转换值与当前时刻的各原始加速度分量的差值,得到所述加速度在各坐标轴方向上的加速度分量。
17、在其中一个实施例中,所述方法还包括:
18、获取加速度样本、角速度样本,以及对应的位置变化标签信息和姿态变化标签信息;
19、将所述加速度样本和角速度样本输入待训练的惯导模型,由所述待训练的惯导模型基于所述加速度样本确定位置变化预测信息,基于所述角速度样本确定姿态变化预测信息,并根据所述位置变化预测信息和姿态变化预测信息输出移动轨迹预测信息;
20、将所述移动轨迹预测信息、所述位置变化标签信息和姿态变化标签信息输入预设损失函数,根据所述预设损失函数的输出值,调整所述待训练的惯导模型的模型参数,并返回将所述加速度样本和角速度样本输入待训练的惯导模型的步骤,直至满足预设训练结束条件时,得到经训练的惯导模型。
21、在其中一个实施例中,所述将所述移动轨迹预测信息、所述位置变化标签信息和姿态变化标签信息输入预设损失函数,包括:
22、将所述位置变化预测信息和所述姿态变化预测信息输入所述预设损失函数;
23、获取所述位置变化预测信息的对数方差的第一指数,获取所述位置变化预测信息与所述位置变化标签信息的差值对应的绝对值均差,以及获取所述位置变化预测信息的对数方差;
24、获取所述第一指数与所述绝对值均差的第三乘积;
25、获取所述姿态变化预测信息的对数方差的第二指数,获取一减所述姿态变化标签信息的第四差值,并获取所述第四差值与所述姿态变化预测信息的点积的绝对值;
26、获取所述第二指数和所述绝对值的第五乘积,根据所述第三乘积、所述对数方差以及所述第五乘积的和,得到所述预设损失函数的输出值。
27、在其中一个实施例中,所述将所述初始位置作为所述移动轨迹信息的起点,根据所述初始方向角调整所述移动轨迹信息,包括:
28、获取所述初始位置对应的初始坐标点,根据所述初始坐标点,确定所述移动轨迹信息中各坐标点的坐标值;
29、针对所述移动轨迹信息中的每个坐标点,根据该坐标点的横坐标值与所述初始方向角的余弦值的乘积,以及该坐标点的纵坐标值与所述初始方向角的正弦值的乘积,确定该坐标点对应的调整后的目标横坐标值;
30、根据该坐标点的纵坐标值与所述初始方向角的余弦值的乘积,以及该坐标点的横坐标值与所述初始方向角的正弦值的乘积,确定该坐标点对应的调整后的目标纵坐标值;
31、根据所述目标横坐标值和所述目标纵坐标值,确定该坐标点对应的调整后的目标坐标点;
32、根据多个目标坐标点,得到调整后的移动轨迹信息。
33、在其中一个实施例中,所述获取所述待定位用户在所述信号遮挡区域的初始位置,包括:
34、获取所述待定位用户进入所述信号遮挡区域前的最后可视距位置,作为所述初始位置;所述最后可视距位置基于超宽带定位和/或移动通信定位得到。
35、在其中一个实施例中,所述获取所述待定位用户对应的初始方向角,包括:
36、获取所述待定位用户在所述初始位置的设备正前方,作为设备方向;
37、将正北方向作为所述预设地理方位,根据所述设备正前方与所述正北方向的夹角,确定所述待定位用户的初始方向角。
38、第二方面,本技术提供了一种定位装置,所述装置包括:
39、第一检测模块,用于检测到待定位用户进入信号遮挡区域时,获取所述待定位用户在所述信号遮挡区域的初始位置,并获取所述待定位用户对应的初始方向角;所述初始方向角基于所述待定位用户在所述初始位置时的设备方向与预设地理方位确定;
40、第二检测模块,用于检测到所述待定位用户在所述信号遮挡区域内的移动信息时,获取所述待定位用户对应的加速度和角速度;
41、输入模块,用于将所述加速度和角速度输入经训练的惯导模型,获取所述惯导模型基于所述加速度和角速度输出的移动轨迹信息;
42、调整模块,用于将所述初始位置作为所述移动轨迹信息的起点,根据所述初始方向角调整所述移动轨迹信息;
43、确定模块,用于根据调整后的移动轨迹信息,确定所述待定位用户在所述信号遮挡区域的位置。
44、第三方面,本技术提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的方法的步骤。
45、第四方面,本技术提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法的步骤。
46、第五方面,本技术提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的方法的步骤。
47、上述定位方法、装置、计算机设备、存储介质和计算机程序产品,通过惯导模型基于用户在信号遮挡区域内移动时的加速度和角速度,输出用户的移动轨迹信息,并基于用户在信号遮挡区域的初始位置以及用户对应的初始方向角,调整移动轨迹,基于调整后的移动轨迹信息确定用户在信号遮挡区域的位置。相较于传统的通过多个积分进行用户的定位,本方案通过惯导模型,结合用户的加速度、角速度和初始方向角等参数,确定移动轨迹信息并对移动轨迹信息进行调整,提高了在信号遮挡区域内为用户进行定位的精确度。
- 还没有人留言评论。精彩留言会获得点赞!