一种基于加权相位失配分析的兰姆波缺陷表征方法
本发明涉及一种基于加权相位失配分析的兰姆波缺陷表征方法,该方法可对金属板中较小缺陷几何尺寸信息进行表征,属于无损检测领域。
背景技术:
1、表征真实缺陷的几何形状是超声无损检测的主要挑战之一,特别是对较小尺寸的缺陷。由于缺陷散射信号波形复杂,解释测量数据和提取有关缺陷的有用信息具有挑战性。针对此类问题,许多学者尝试考虑通过兰姆波透射系数[1]或反射系数[2]对缺陷进行表征。但对于较小或形状复杂的缺陷,通过兰姆波透射系数或反射系数对缺陷进行表征存在一定误差。完整的散射系数矩阵[3,4]包含丰富的缺陷信息,被广泛用于对较小或复杂缺陷的表征。但由于通常无法获得完整的散射矩阵,从散射声场中获取关于缺陷的完备信息是具有很大的挑战。为了凸显缺陷产生的散射声场,李立等[5]提出将去相关系数用于缺陷散射信息的表征,但时间窗选择的随机性对散射信号的提取和表征具有较大影响。
2、随着研究的进一步发展,从接收信号中提取瞬时相位并用于信号分析的研究受到了广泛关注。ebru等[6]从地震波中提取瞬时相位和波包络,通过分析整段信号,可以从单个地震图中提取较多的信息。但其提取的信号包含较多无用信息,分析瞬时相位时没有对幅值较高和较低的波包进行区分,降低了对低振幅波包的利用率。barbara[7]等提出对信号波包进行加权,从而平衡幅值较高和较低波包的贡献,可提高对低振幅波包的利用率,但其对于波包的截取存在主观性,对低幅值波包的截取存在一定误差。诸如以上所述,已有文献通过提取信号中的瞬时相位来进行相应研究,但将瞬时相位分析应用于缺陷表征的研究还并不完善。例如,通过提取有无缺陷时接收信号的瞬时相位[8,9],判断有无缺陷。但并未提出具体的瞬时相位评价指标,没有对有无缺陷之间的差别进行一个量化分析,不能对缺陷的尺寸进行大致判断。
3、针对上述缺陷表征方法中存在的局限性,本发明提出一种基于加权相位失配分析的兰姆波缺陷表征方法。
技术实现思路
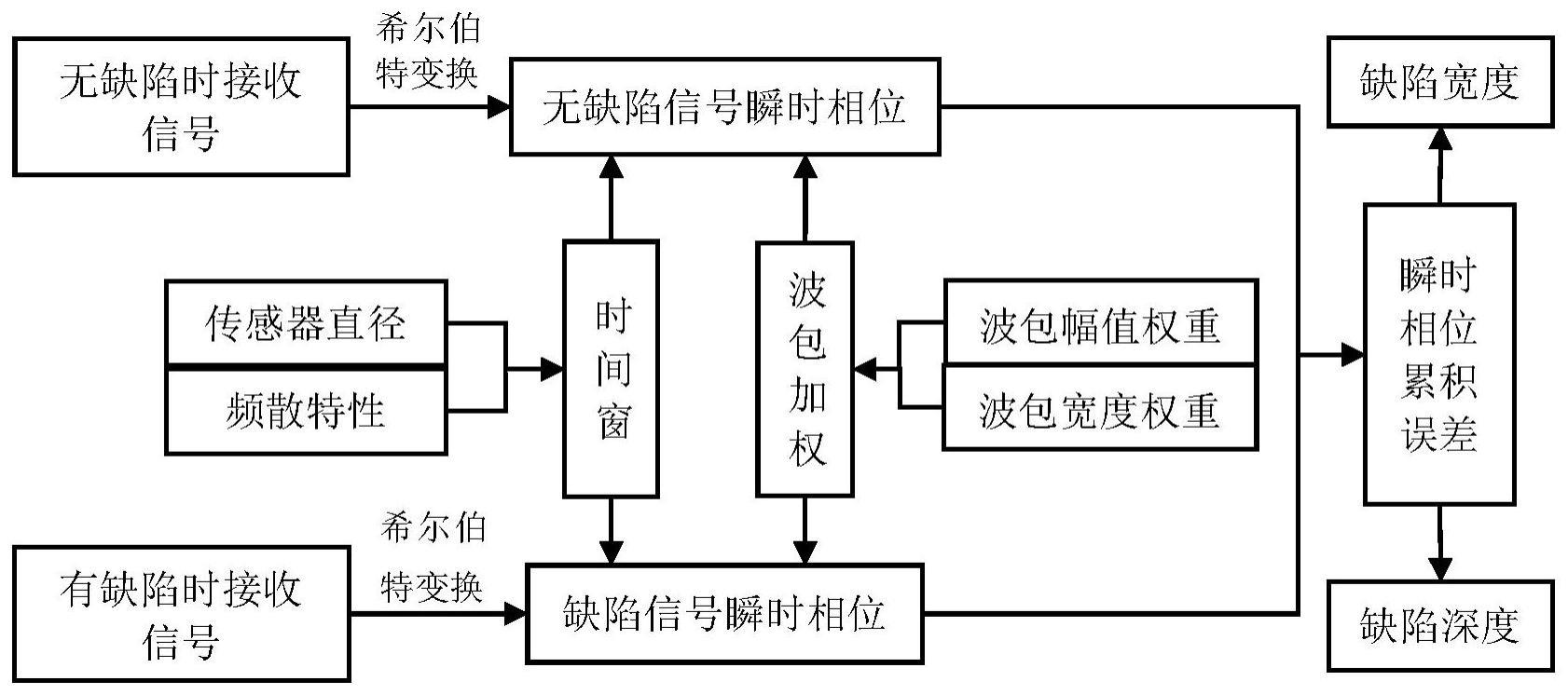
1、本发明的目的在于提供一种加权相位失配分析的兰姆波缺陷表征方法。本方法根据兰姆波相位对缺陷几何参数变化较为敏感且存在某种相关性的特点,对有无缺陷信息的兰姆波接收信号进行加权相位失配分析,提出加权相位累积误差特征指标。综合考虑兰姆波频散特性和传感器直径因素对检测信号的影响,确定用于相位失配分析的时间窗。根据波包幅值权重和波包宽度权重对瞬时相位进行加权,平衡不同波包对加权相位累积误差的贡献,提高了缺陷表征精度。
2、一种基于加权相位失配分析的兰姆波缺陷表征方法,是通过以下步骤实现的:
3、1)采集被测试件的时域波形数据,根据希尔伯特变换提取检测信号的瞬时相位,对有无缺陷时的兰姆波检测信号进行加权相位失配分析;
4、2)综合考虑兰姆波频散特性和传感器直径因素对检测信号的影响,计算用于相位失配分析的时间窗;
5、3)提取检测信号中不同波包的瞬时相位,并根据波包宽度和波包幅值计算施加在不同波包上的权重;
6、4)提出加权相位累积误差指标,改变缺陷的宽度或深度得到加权相位累积误差曲线变化趋势;
7、5)根据缺陷尺寸变化时的加权相位累积误差增量,计算不同缺陷深度或宽度变化的区分度。
8、在对有无缺陷检测信号进行相位失配分析时,综合考虑兰姆波频散特性和传感器直径因素确定相位失配分析的时间窗,对检测信号波包进行提取。
9、根据波包的宽度和波包幅值来计算不同波包的权重,从而平衡不同波包对加权相位累积误差的贡献,使不同尺寸缺陷都有一个较为合理的区分度,提高了缺陷表征精度。
10、本发明提出的一种基于加权相位失配分析的兰姆波缺陷表征方法,其基本原理如下:
11、分析有无缺陷时接收信号瞬时相位的失配程度;通过时间窗对接收信号中不同波包进行提取,并根据波包幅值和波包宽度对瞬时相位进行加权,从而平衡幅值较高和较低波包的贡献。其中,加权相位累积误差指标为χ(m):
12、
13、式中i——接收信号中波包的序号;
14、——有缺陷时接收信号第i波包的瞬时相位;
15、φi(t)——无缺陷时接收信号第i波包的瞬时相位;
16、wi——第i波包瞬时相位权重;
17、m——缺陷的宽度或深度;
18、n——接收信号波包个数;
19、δti——第i波包时间窗。
20、
21、式中fi(t)——无缺陷时的接收信号第i波包;
22、——无缺陷时接收信号第i波包的希尔伯特变换。
23、对于瞬时相位权重的确定,本方法考虑了波包幅值权重和波包宽度权重两个因素。
24、
25、
26、式中ai——第i波包最大幅值。
27、
28、式中ki——第i波包数据点数。
29、对于时间窗的确定,由于传感器直径较宽,当其倾斜放置时声波传播路径不同,故兰姆波将在一定时间范围内展宽。本方法考虑了兰姆波的频散特性和传感器直径较大导致的接收信号波包展宽。
30、在已知激励信号中心频率f0和铝板厚度d的情况下,根据频散曲线可知不同模态兰姆波的传播速度,从而确定声波传播时间。本方法所接收信号中包含a0模态和s0模态两种兰姆波,并且以-3db带宽确定下截止频率为fmin,上截止频率为fmax。假设激励传感器中心到铝板的距离为l空1,接收传感器中心到铝板的距离为l空2,a0模态兰姆波在铝板中的传播的最短距离为la,s0模态兰姆波在铝板中的传播的最长距离为ls,传感器的直径为d,声波在空气中的传播速度为c空气,激励信号宽度为t1。
31、对于a0模态兰姆波,其从传感器到铝板的最远传播距离为:
32、
33、式中ka1——激励a0模态兰姆波在空气中传播的最远距离;
34、ka2——接收a0模态兰姆波在空气中传播的最远距离;
35、θa1——a0模态兰姆波入射角;
36、θa2——a0模态漏兰姆波入射角。
37、对于a0模态兰姆波,其从传感器到铝板的最近传播距离为:
38、
39、式中k'a1——激励传感器到铝板的最近距离;
40、k'a2——接收传感器到铝板的最近距离。
41、对于s0模态兰姆波,其从传感器到铝板的最远传播距离为:
42、
43、式中ks1——激励s0模态兰姆波在空气中传播的最远距离;
44、ks2——接收s0模态兰姆波在空气中传播的最远距离;
45、θs1——s0模态兰姆波入射角;
46、θs2——s0模态漏兰姆波入射角。
47、对于s0模态兰姆波,其从传感器到铝板的最近传播距离为:
48、
49、式中k's1——激励s0模态兰姆波在空气中传播的最近距离;
50、k's2——接收s0模态兰姆波在空气中传播的最近距离。
51、考虑频散特性和传感器直径因素确定的a0模态兰姆波时间窗为:
52、δt1=[t1+k'a1/c空气+la/cafmax+k'a2/c空气,t1+ka1/c空气+la/cafmin+ka2/c空气] (10)
53、考虑频散特性和传感器直径因素确定的s0模态兰姆波时间窗为:
54、δt2=[t1+k's1/c空气+ls/cafmin+k's2/c空气,t1+ks1/c空气+ls/cafmax+ks2/c空气] (11)
55、本方法将每次缺陷尺寸变化时加权相位累积误差的增量记为ki,总的增量记为k,则可将缺陷尺寸的区分度ii记为
56、
57、式中i——缺陷深度或宽度变化次序。
58、本发明具有以下优点:(1)综合考虑兰姆波频散特性和传感器直径两因素来确定相位失配分析的时间窗,减少了无用信息对结果的影响;(2)通过波包幅值权重和波包宽度权重对瞬时相位进行加权,平衡不同波包对加权相位累积误差的贡献,提高了缺陷表征精度。
- 还没有人留言评论。精彩留言会获得点赞!