用于雷达信号处理的方法和设备与流程
以下描述涉及具有雷达信号处理的方法和设备。
背景技术:
1、高级驾驶员辅助系统(adas)可通过使用安装在车辆内部或外部的传感器来支持驾驶以提高驾驶员的安全性和便利性并避免危险情况。
2、通常,在adas中使用的传感器可包括例如相机、红外传感器、超声波传感器、光检测和测距(lidar)系统和雷达。与其他传感器(这些传感器选项)相比,雷达可通常能够在不受车辆周围的环境条件影响的情况下稳定地测量车辆附近的对象。
技术实现思路
1、提供本
技术实现要素:
来以简化的形式介绍下面在具体实施方式中进一步描述的构思的选择。本发明内容不意在确认要求权利的主题的关键特征或必要特征,也不意在用于帮助确定要求权利的主题的范围。
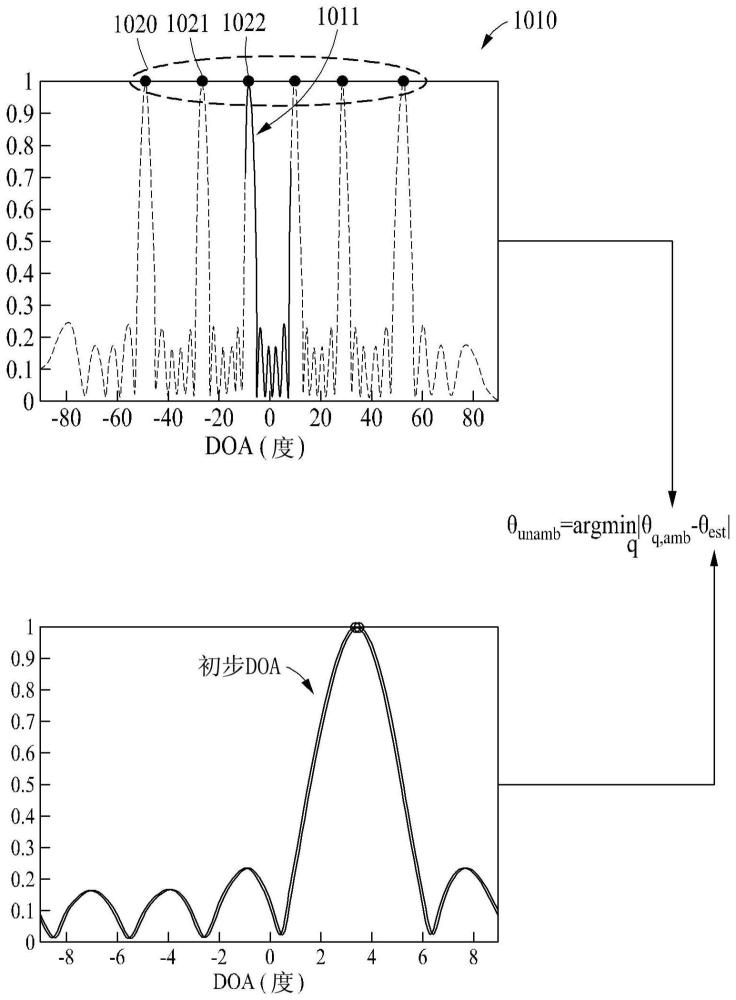
2、在一个总体方面,一种处理器实现的方法包括:从通过雷达传感器中的阵列天线接收的雷达信号提取第一载波频率的第一线性调频序列信号和第二载波频率的第二线性调频序列信号;基于阵列天线的天线元件之间的距离来确定第一线性调频序列信号的第一相位差;基于阵列天线的天线元件之间的距离来确定第二线性调频序列信号的第二相位差;基于第一相位差,根据第一线性调频序列信号的第一载波频率来确定第一到达方向(doa)频率;基于第二相位差,根据第二线性调频序列信号的第二载波频率来确定第二doa频率;基于第一doa频率与第二doa频率之间的频率差来估计目标的初步doa;基于从通过第一线性调频序列信号测量的目标的模糊doa得出的模糊数,以预定时间间隔确定模糊doa候选;和基于初步doa从模糊doa候选选择目标的最终doa。
3、最终doa可包括:从模糊doa候选选择与初步doa最接近的模糊doa候选作为目标的最终doa。
4、阵列天线可包括一对相邻天线元件,所述一对相邻天线元件以大于第一线性调频序列信号的第一半波长和第二线性调频序列信号的第二半波长中的至少一个的距离彼此分开设置。
5、所述一对相邻天线元件可包括:天线布置,被配置为测量仰角或方位角中的一个。
6、选择最终doa的步骤可导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣。
7、选择最终doa的步骤可导致初步doa与最终doa之间存在的量化误差。
8、第一doa频率可依赖于第一载波频率。
9、估计初步doa的步骤可包括:基于第一doa频率与第二doa频率之间的频率差、光速、阵列天线的天线元件之间的距离以及第一载波频率与第二载波频率之间的频率差来估计初步doa。
10、模糊doa候选可基于模糊doa从预定等式或预定数值表得出。
11、雷达信号可包括:第一载波频率的第一线性调频元素和第二载波频率的第二线性调频元素,并且,第一线性调频元素可与第二线性调频元素交替。
12、在一个总体方面,一种存储指令的非暂时性计算机可读存储介质,所述指令在由处理器执行时使处理器执行所述方法。
13、在一个总体方面,一种设备包括:雷达传感器,被配置为通过阵列天线接收雷达信号;和处理器,被配置为:从雷达信号提取第一载波频率的第一线性调频序列信号和第二载波频率的第二线性调频序列信号;基于阵列天线的天线元件之间的距离来确定第一线性调频序列信号的第一相位差;基于阵列天线的天线元件之间的距离来确定第二线性调频序列信号的第二相位差;基于第一相位差,根据第一线性调频序列信号的第一载波频率来确定第一到达方向(doa)频率;基于第二相位差,根据第二线性调频序列信号的第二载波频率来确定第二doa频率;基于第一doa频率与第二doa频率之间的频率差来估计目标的初步doa;基于从通过第一线性调频序列信号测量的目标的模糊doa得出的模糊数,以预定时间间隔确定模糊doa候选;并且基于初步doa从模糊doa候选选择目标的最终doa。
14、处理器可被配置为:从模糊doa候选选择与初步doa最接近的模糊doa候选作为目标的最终doa。
15、阵列天线可包括一对相邻天线元件,所述一对相邻天线元件以大于第一线性调频序列信号的第一半波长和第二线性调频序列信号的第二半波长中的至少一个的距离彼此分开设置。
16、所述一对相邻天线元件可包括:天线布置,被配置为测量仰角或方位角中的一个。
17、最终doa的选择可导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣。
18、最终doa的选择可导致初步doa与最终doa之间存在的量化误差。
19、在一个总体方面,一种车辆包括:雷达传感器,被配置为通过阵列天线接收雷达信号;处理器,被配置为:从雷达信号提取第一载波频率的第一线性调频序列信号和第二载波频率的第二线性调频序列信号;基于阵列天线的天线元件之间的距离来确定第一线性调频序列信号的第一相位差;基于阵列天线的天线元件之间的距离来确定第二线性调频序列信号的第二相位差;基于第一相位差,根据第一线性调频序列信号的第一载波频率来确定第一到达方向(doa)频率;基于第二相位差,根据第二线性调频序列信号的第二载波频率来确定第二doa频率;基于第一doa频率与第二doa频率之间的频率差来估计目标的初步doa;基于从通过第一线性调频序列信号测量的目标的模糊doa得出的模糊数,以预定时间间隔确定模糊doa候选;并且基于初步doa从模糊doa候选选择目标的最终doa;和控制系统,被配置为基于最终doa来控制车辆。
20、最终doa的选择可导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣。
21、最终doa的选择可导致初步doa与最终doa之间存在的量化误差。
22、根据以下具体实施方式、附图和权利要求,其他特征和方面将是清楚的。
技术特征:
1.一种用于雷达信号处理的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,选择最终doa的步骤包括:从所述多个模糊doa候选选择与初步doa最接近的模糊doa候选作为目标的最终doa。
3.根据权利要求1所述的方法,其中,阵列天线包括一对相邻天线元件,所述一对相邻天线元件以大于第一线性调频序列信号的第一半波长和第二线性调频序列信号的第二半波长中的至少一个的距离彼此分开设置。
4.根据权利要求3所述的方法,其中,所述一对相邻天线元件包括:天线布置,被配置为测量仰角和方位角中的一个。
5.根据权利要求3所述的方法,其中,选择最终doa的步骤导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣。
6.根据权利要求1所述的方法,其中,选择最终doa的步骤导致初步doa与最终doa之间存在的量化误差。
7.根据权利要求1所述的方法,其中,第一doa频率依赖于第一载波频率。
8.根据权利要求1所述的方法,其中,估计初步doa的步骤包括:基于第一doa频率与第二doa频率之间的频率差、光速、阵列天线的天线元件之间的距离以及第一载波频率与第二载波频率之间的频率差来估计初步doa。
9.根据权利要求1所述的方法,其中,所述多个模糊doa候选基于模糊doa从预定等式或预定数值表得出。
10.根据权利要求1至9中的任一项所述的方法,其中,雷达信号包括:
11.一种存储指令的非暂时性计算机可读存储介质,所述指令在由处理器执行时使处理器执行根据权利要求1至10中的任一项所述的方法。
12.一种用于雷达信号处理的设备,所述设备包括:
13.根据权利要求12所述的设备,其中,处理器被配置为:从所述多个模糊doa候选选择与初步doa最接近的模糊doa候选作为目标的最终doa。
14.根据权利要求12所述的设备,其中,阵列天线包括一对相邻天线元件,所述一对相邻天线元件以大于第一线性调频序列信号的第一半波长和第二线性调频序列信号的第二半波长中的至少一个的距离彼此分开设置。
15.根据权利要求14所述的设备,其中,所述一对相邻天线元件包括:天线布置,被配置为测量仰角和方位角中的一个。
16.根据权利要求12所述的设备,其中,最终doa的选择导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣。
17.根据权利要求12所述的设备,最终doa的选择导致初步doa与最终doa之间存在的量化误差。
18.根据权利要求12至17中的任一项所述的设备,其中,所述设备是车辆。
19.一种车辆,包括:
20.根据权利要求19所述的车辆,其中,最终doa的选择导致由于距离而在doa频谱中的至少一部分中出现的光栅波瓣,其中,最终doa的选择导致初步doa与最终doa之间存在的量化误差。
技术总结
提供一种用于雷达信号处理的方法和设备。所述方法包括:从雷达信号提取第一线性调频序列信号和第二线性调频序列信号;基于阵列天线的天线元件之间的距离来确定第一线性调频序列信号的第一相位差;基于阵列天线的天线元件之间的距离来确定第二线性调频序列信号的第二相位差;基于第一相位差,根据第一载波频率来确定第一到达方向(DOA)频率;基于第二相位差,根据第二载波频率来确定第二DOA频率;基于第一DOA频率与第二DOA频率之间的频率差来估计目标的初步DOA;确定模糊DOA候选;和基于初步DOA从模糊DOA候选选择目标的最终DOA。
技术研发人员:崔成焘,姜承兑
受保护的技术使用者:三星电子株式会社
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!