基于距离多普勒联合估计的多视角SAR自主定位方法与流程
本发明属于机载合成孔径雷达的,尤其涉及一种基于距离多普勒联合估计的多视角sar自主定位方法。
背景技术:
1、合成孔径雷达(sar)是一种主动微波遥感设备,具有全天时、全天候对感兴趣区域进行高分辨率成像和目标定位能力。sar目标自主定位是指在没有目标参考图、地面控制点等先验信息条件下,利用机上惯导数据、雷达相关参数以及目标在sar图像中的位置,确定目标的空间三维坐标或经纬度,实现无参考点的目标绝对定位,遂行情报侦察监视支撑远程目指火力攻击,具有强时效性、高灵活度、普适性等优势。
2、对于单景sar图像目标定位比较成熟的算法主要有f.leberl算法、共线方程法、多项式法和距离多普勒算法。由于机载平台更容易受高空气流影响产生扰动,平台稳定性差且不易控制,目前机载sar自主定位技术主要基于jpl实验室提出的距离-多普勒模型,并多采用地球模型方程或引入数字高程模型作为支撑条件。除此之外的图像定位方法都需要一定数量的控制点才能解算纠正参数。
3、由于雷达系统误差、惯导误差、大气条件、参考椭球与实际地形差异等因素的耦合影响,以及sar图像出现不同程度的位移、拉伸、旋转等几何畸变,目前机载单景sar自主定位误差较大,定位精度无法满足坐标攻击需求。并且单景sar成像中存在遮挡、叠掩等情况,无法获取目标的图像信息进行定位。
4、为了进一步提高sar自主定位的精度,不依赖外部数据库,根据多帧sar图像的空间几何关系,利用空间观测数据的冗余度提升定位精度。多视角sar定位将多帧不同视角构成立体的同一场景sar图像,结合图像匹配技术得到符合条件的目标像点,再通过构像模型下的定向参数计算、立体交会等方法实现地面目标定位。1996年,dowman利用ers-1精确轨道参数解算定向参数,在无地面控制点情况下立体sar图像定位的平面精度为像素分辨率的4倍;2011年capaldo首次利用cosmo-skymed的聚束立体影像进行三维信息提取实验;2012年toutin进行radarsat2立体影像无需地面控制点的三维信息提取,大大减少对控制点的需求量。尽管上述星载立体定位方法达到了较高的定位精度,但通常较少考虑轨道参数误差的影响,对于机载机动性平台的适应性不强。
5、综上所述,现有sar图像定位技术主要存在以下缺点:
6、1)单景sar自主定位精度较低,在无控制点或外部数据库时,自主定位精度易受到参数解算精度、支撑条件性能、阴影遮挡以及构像模型适用性等因素影响。
7、2)多视角sar自主定位仅利用雷达测距能力构建距离方程组,没有利用sar的多普勒测频能力。
8、3)在存在测距偏差和测速偏差的条件下,仅构建关于目标位置的非线性定位方程组难以得到高精度的最小二乘解。
9、综上,现有技术的缺陷致使雷达使用性能降低。
10、有鉴于此,特提出本发明。
技术实现思路
1、本发明的目的在于提供一种基于距离多普勒联合估计的多视角sar自主定位方法,解决现有技术的缺陷致使雷达使用性能降低的技术问题。本案的技术方案有诸多技术有益效果,见下文介绍:
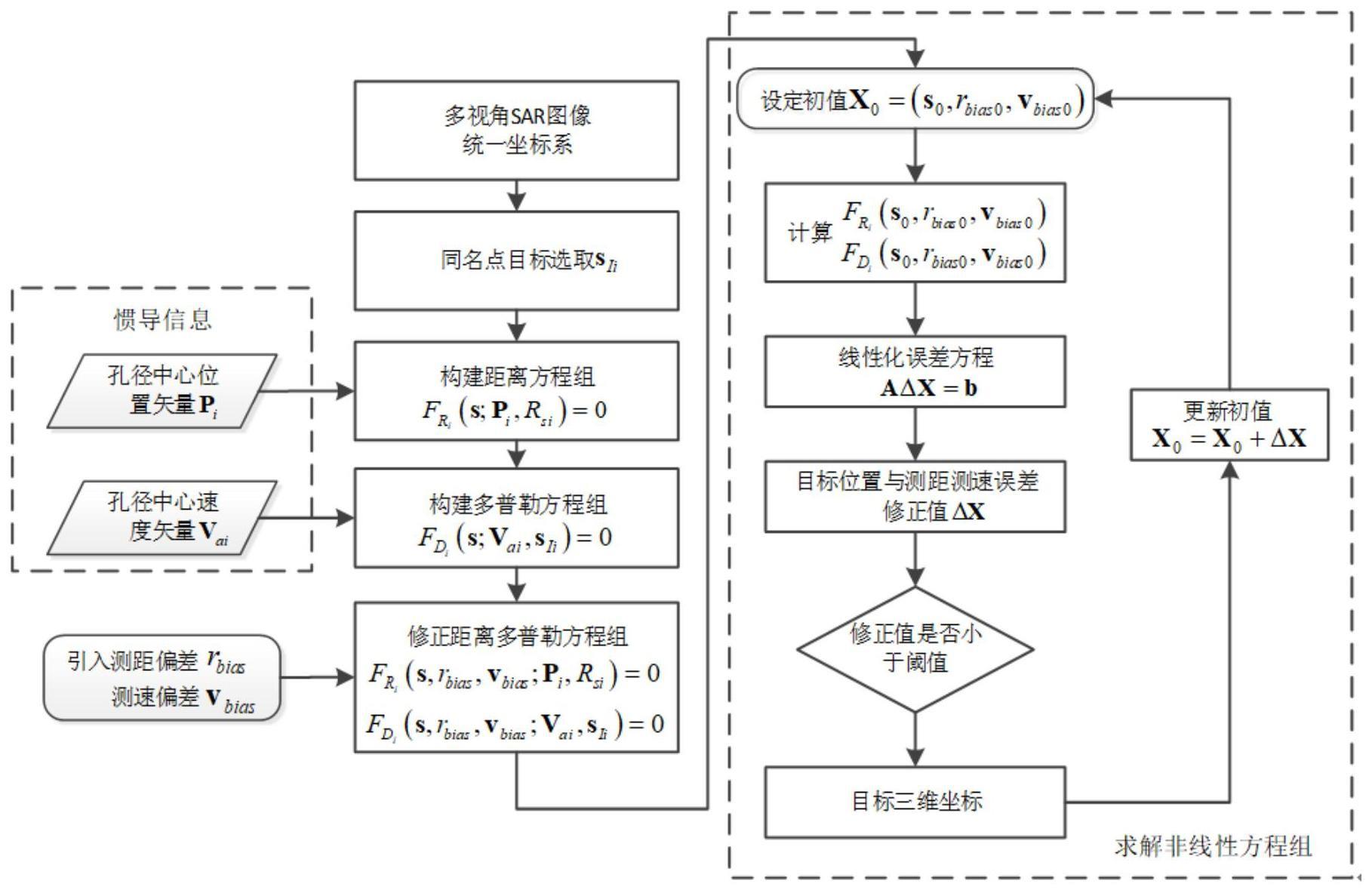
2、提供一种基于距离多普勒联合估计的多视角sar自主定位方法,其方法包括:
3、将多视角sar图像成像参数统一至相同坐标系中,通过图像匹配方法获取目标在各图像中的坐标;
4、利用各图像合成孔径中心的位置矢量pi(bi,li,hi)、目标图像坐标sii和距离rs,meas,i构建多视角距离方程组,并利用各图像合成孔径中心的速度矢量vi、目标图像坐标sii构建多视角多普勒方程组;
5、引入测距偏差rbias和速度矢量偏差vbias作为待求解未知量,修正所述多视角多普勒方程组;
6、修正所述多视角多普勒方程组进行牛顿迭代求解,输出三维定位结果。
7、与现有技术相比,本发明提供的技术方案包括以下有益效果:
8、针对单景sar定位精度较低,易受惯导精度影响的问题,通过多视角sar图像序列提供的空间观测自由度增加观测方程数量,将sar拥有的测距和测频能力构建距离-多普勒方程组,借鉴卫星定位中的伪距概念,将常数测距偏差作为待估计量,并将惯导系统的常数测速偏差引入定位方程中,实现对目标三维位置、测距测速偏差的联合估计,有效提升定位精度。该发明不依赖地球椭球模型和数字高程地图等外部支撑条件,充分利用多视角观测构型提供的距离多普勒非共面能力,并考虑系统测距偏差和惯导测速偏差带来的影响,可有效解决单景sar定位精度较低的技术难题,在情报侦察、地形测绘、远程目指精确打击方面具有较大的应用潜力,并且,通过多视角sar图像序列提供的空间观测自由度,并考虑测距测速偏差和速度偏差,对目标s进行定位。
技术特征:
1.一种基于距离多普勒联合估计的多视角sar自主定位方法,其特征在于,其方法包括:
2.根据权利要求1所述的基于距离多普勒联合估计的多视角sar自主定位方法,其特征在于,将多视角sar图像成像参数统一至相同坐标系中,通过图像匹配方法获取目标在各图像中的坐标,包括:
3.根据权利要求2所述的基于距离多普勒联合估计的多视角sar自主定位方法,其特征在于,利用各图像合成孔径中心的位置矢量pi(bi,li,hi)、目标图像坐标sii和距离rs,meas,i构建多视角距离方程组,并利用各图像合成孔径中心的速度矢量vi、目标图像坐标sii构建多视角多普勒方程组,包括:
4.根据权利要求3所述的基于距离多普勒联合估计的多视角sar自主定位方法,其特征在于,引入测距偏差rbias和速度矢量偏差vbias作为待求解未知量,修正所述多视角多普勒方程组,包括:
5.根据权利要求4所述的基于距离多普勒联合估计的多视角sar自主定位方法,其特征在于,修正所述多视角多普勒方程组进行牛顿迭代求解,输出三维定位结果,包括:
技术总结
本发明的基于距离多普勒联合估计的多视角SAR自主定位方法,其方法包括:将多视角SAR图像成像参数统一至相同坐标系中,通过图像匹配方法获取目标在各图像中的坐标;利用各图像合成孔径中心的位置矢量、目标图像坐标和距离构建多视角距离方程组,并利用各图像合成孔径中心的速度矢量、目标图像坐标构建多视角多普勒方程组;引入测距偏差和速度矢量偏差作为待求解未知量,修正所述多视角多普勒方程组,通过多视角SAR图像序列提供的空间观测自由度,并考虑测距测速偏差和速度偏差,对目标S进行定位。
技术研发人员:郭振宇,刘嘉信,吴赛赛
受保护的技术使用者:中国航空工业集团公司雷华电子技术研究所
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!