一种适用低精度地图的定位方法及系统与流程
本发明涉及自动驾驶领域,特别是涉及一种适用低精度地图的定位方法及系统。
背景技术:
1、定位技术是自动驾驶应用技术的基础和核心技术之一,为车辆提供位置和姿态,即位姿信息。按定位原理,定位技术可以分为几何定位、航位推算、特征定位。几何定位是对已知位置的参考设备进行测距或者测角,再通过几何计算确定自身位置。包括gnss(globalnavigation satellite system)、uwb(ultra wide band)、蓝牙、5g等技术,提供绝对定位信息。在智能汽车应用中以gnss技术应用最广。gnss定位基于卫星定位技术,分为单点定位、差分gps定位、rtk(real-time kinematic)gps定位,其中单点定位提供3~10米定位精度,差分gps提供0.5~2米定位精度,rtk gps提供厘米级定位精度。其局限性是依赖定位设施,受信号遮挡、反射等影响,在隧道、高架等场景下失效。
2、航位推算(dead reckoning)是从上一时刻位置出发,根据imu(inertialmeasurement unit)和轮速计等传感器的运动数据推算下一时刻的位置,提供的是相对定位信息。其局限性是随着推算距离的增加,定位误差会不断累积增大。
3、特征定位首先获取周围环境的若干特征,如基站id、wifi指纹、图像、lidar点云等。然后将观测特征和事先建立的地图进行匹配,确定在地图中的位置,可提供绝对定位信息。影响特征定位的直接因素是特征的数量、质量和区分度。其局限性是因为场景、环境等因素影响特征观测时,定位精度和稳定性下降。
4、目前业界一般将地图分为两种,一种是标准地图(standard definition map,简称sd地图),另一种是高精地图(high definition map,简称hd map)。标准地图也称导航地图,在手机导航、车机导航等领域广泛应用,其精度一般在道路级(road),提供导航必要的道路几何和语义信息。高精地图区别于导航地图,高精度地图除了能提供道路(road)级别的导航信息外,还能够提供车道(lane)级别的导航信息。在信息的丰富度还是信息的精度方面,都远高于传统导航地图。
5、近年发展火热的自动或智能驾驶领域,普遍依赖于高精地图。在高精地图的基础上实现高精定位,以及车辆的规划、控制等智能驾驶算法。但高精地图的高精度,也使得其制作成本高昂,更新周期漫长,并且对政策有强依赖,使得大面积的推广应用存在很大困难。因此降低对地图高精的依赖,使用相对低精度的地图进行智能驾驶成为一个重要方向。
技术实现思路
1、本发明的一个目的是要提供一种适用低精度地图的定位方法以解决现有技术中车辆在地图定位时对高精地图依赖性强,算法成本高的问题。
2、特别地,本发明提供了一种适用低精度地图的定位方法,包括以下步骤:
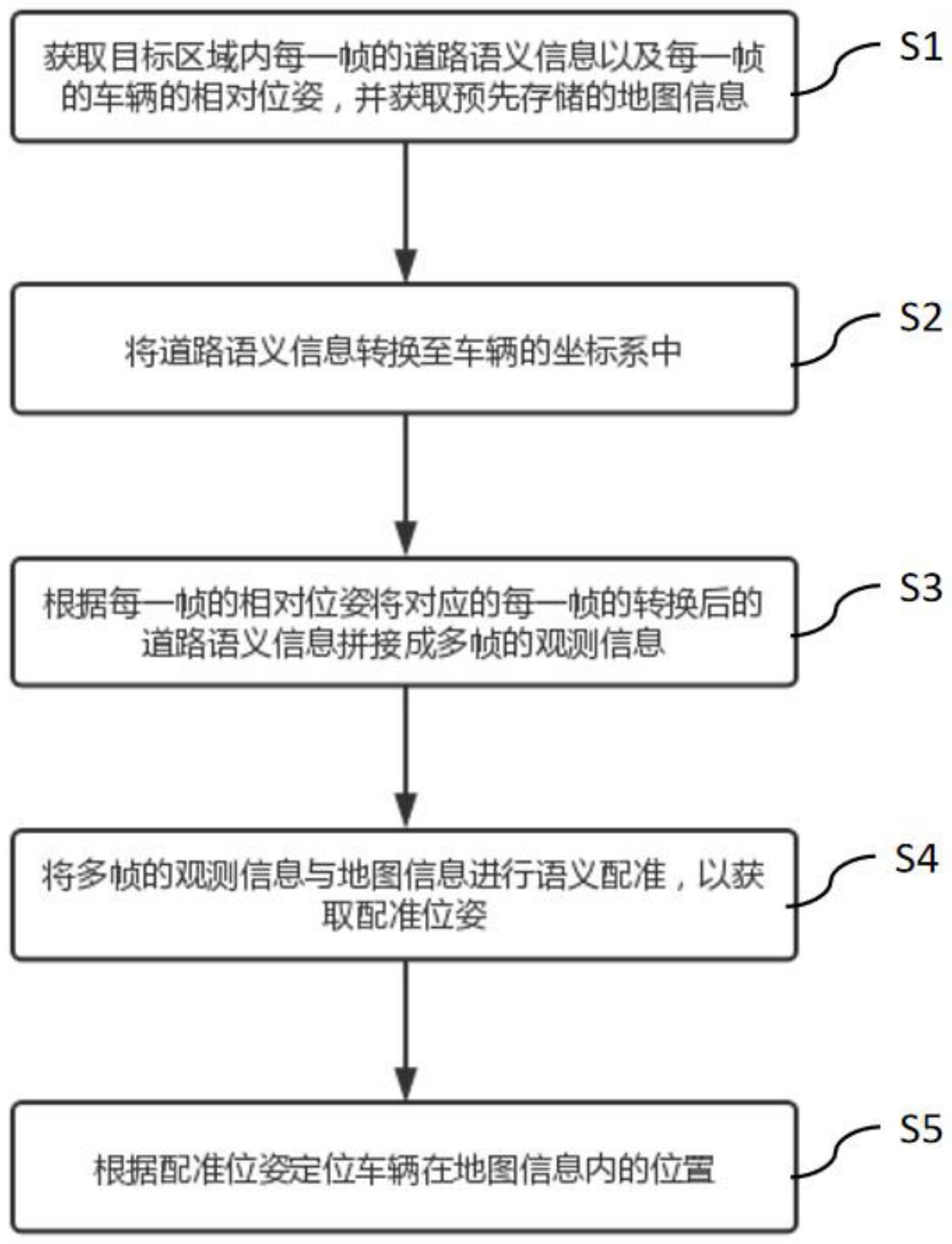
3、获取目标区域内每一帧的道路语义信息以及每一帧的车辆的相对位姿,并获取预先存储的地图信息;
4、将所述道路语义信息转换至车辆的坐标系中;
5、根据每一帧的所述相对位姿将对应的每一帧的转换后的所述道路语义信息拼接成多帧的观测信息;
6、将所述多帧的观测信息与所述地图信息进行语义配准,以获取配准位姿;
7、根据所述配准位姿定位所述车辆在所述地图信息内的位置。
8、进一步地,所述观测信息包括静态观测信息和动态观测信息。
9、进一步地,所述根据每一帧的所述相对位姿将对应的每一帧的转换后的所述道路语义信息拼接成多帧的观测信息中还包括:
10、获取每一帧所述观测信息的观测特征和每一帧所述观测特征对应的位姿信息;
11、将所述观测特征与所述位姿信息进行融合计算以得到每帧最新观测信息;
12、将所有的所述最新观测信息累加以形成所述多帧的观测信息。
13、进一步地,所述将所述观测特征与所述位姿信息进行融合计算以得到每帧最新观测信息中包括:
14、通过以下公式进行融合计算得到最新观测信息
15、nfi=tdi-inverse*tdn*fi公式一
16、其中nfi表示最新观测信息,tdi-inverse为tdi的逆矩阵,tdi为第i个位姿信息,fi为第i个观测特征,tdn为最新的位姿信息。
17、进一步地,所述将所述多帧观测信息与所述地图信息进行语义配准以获取配准位姿的步骤中还包括:
18、将所述地图信息分割成多个不同区域并获取所述不同区域内的地图特征;
19、将所述观测特征与所述不同区域内的所述地图特征进行配准,以计算所述不同区域内的配准位姿;
20、根据所述配准位姿确定所述车辆在所述地图信息中的位置。
21、进一步地,所述将所述观测特征与不同区域内的所述地图特征进行配准,以计算不同区域内的配准位姿中还包括:
22、获取单个区域内的静态观测特征配准位姿的第一代价函数和动态观测特征配准位姿的第二代价函数;
23、将所述第一代价函数和所述第二代价函数拟合以获得所述单个区域内的配准位姿函数;
24、对所述配准位姿函数进行求解以得到所述配准位姿。
25、进一步地,所述第一代价函数通过以下方式计算得到:
26、fstatic(twb)=sum(disttozonestatic(twb*si,zj))
27、disttozonestatic(twb*di,zj)=1 if twb*si in right zone zi
28、 =0 if twb*si in error zone zj
29、其中,fstatic(twb)为第一代价函数,sum()为求和函数,si为第i个静态观测特征,zj为第j个区域,disttozonestatic()表示观测特征si在通过twb投影后与道路区域zj之间的匹配程度。
30、进一步地,所述第二代价函数通过以下方式计算得到:
31、fdynamic(twb)=sum(disttozonedynamic(twb*di,zj))
32、disttozonedynamic(twb*di,zj)=1 if twb*di in right zone zi
33、 =0 if twb*di in error zone zj
34、其中,fdynamic(twb)为第二代价函数,di为第i个动态观测特征,zj为第j个区域,disttozonedynamic()表示观测特征si在通过twb投影后与道路区域zj之间的匹配程度。
35、本发明还公开了一种适用低精度地图的定位系统,包括控制装置,所述控制装置包括存储器和处理器,所述存储器内存储有控制程序,所述控制程序被所述处理器执行时用于实现上述所述的定位系统。
36、本发明通过获取预先存储的地图信息,然后在车辆通过该区域时,获取该区域内的多帧观测信息,将该多帧观测信息与地图信息进行配准,从而得到配准位姿,根据配准位姿来定位车辆在地图中的位置,进而解决了现有技术中车辆在地图定位时对高精地图依赖性强,算法成本高的问题。
37、根据下文结合附图对本发明具体实施例的详细描述,本领域技术人员将会更加明了本发明的上述以及其他目的、优点和特征。
- 还没有人留言评论。精彩留言会获得点赞!