用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的传感器组件的制作方法
本发明涉及一种用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的传感器组件。一种用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的方法也是本发明的主题,所述方法可通过这种传感器组件来执行。
背景技术:
1、由现有技术已知通过使用相应的传感器组件来求取可围绕旋转轴线旋转的物体的旋转角度。这种传感器组件例如用作油门踏板中的踏板行程传感器,所述油门踏板在专业术语上也称作加速脚踏杠杆或加速踏板,是车辆的控制元件,利用其可以调节发动机功率。其位于驾驶员座位区域的搁脚空间中并且通常用右脚操作。在现代车辆中,油门踏板不再机械式地直接通过连杆或绳索传动装置作用,而是通过发动机控制系统作用在节流元件或喷射系统上。当用于电动车辆时,通过与压力成比例的电学变量来控制电气式产生的车辆功率。替代地,这种传感器组件还可以用于制动踏板,其也称作脚踏制动杠杆,其用作车辆的工作制动系统的操作装置。驾驶员的脚踏力首先在此处增强,以便在可用的踏板行程上产生足够的制动压力。该增强由脚踏制动杠杆的杠杆系统产生。通过相应的尺寸设计,在此可以实现将脚踏力增强约五倍。然而,对于当今的车辆这不足以制动车辆或使车辆停止,因此要通过制动力增强器进一步增强。此外从现有技术中已知的解决方案是,将油门踏板与制动踏板组合成控制杆,以减轻驾驶员的负担并且适应日益增加的交通密度。踏板值传感器可以例如实现为双电位计或通过其他传感器原理,例如借助霍尔元件,来实现。
2、由专利文献de 10 2019 121 759 a1已知一种用于车辆的制动设备,其具有踏板行程传感器单元和控制单元,所述踏板行程传感器单元感测制动踏板的踏板行程并输出踏板行程信号,所述控制单元基于由踏板行程传感器单元输出的踏板行程信号来控制用于制动车辆的制动致动器并输出斜坡信号。踏板行程传感器单元可以基于零点感测踏板臂的旋转角度并且基于感测结果将踏板行程信号输出为pwm信号。
技术实现思路
1、具有独立权利要求1的特征的、用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的传感器组件具有如下优点,即通过磁性测量原理和感应测量原理的组合能够实现针对可围绕旋转轴线旋转的物体的旋转运动的分辨的异构冗余。优选地,根据本发明的传感器组件的实施方式可以用于分辨不超过360°旋转的旋转运动。
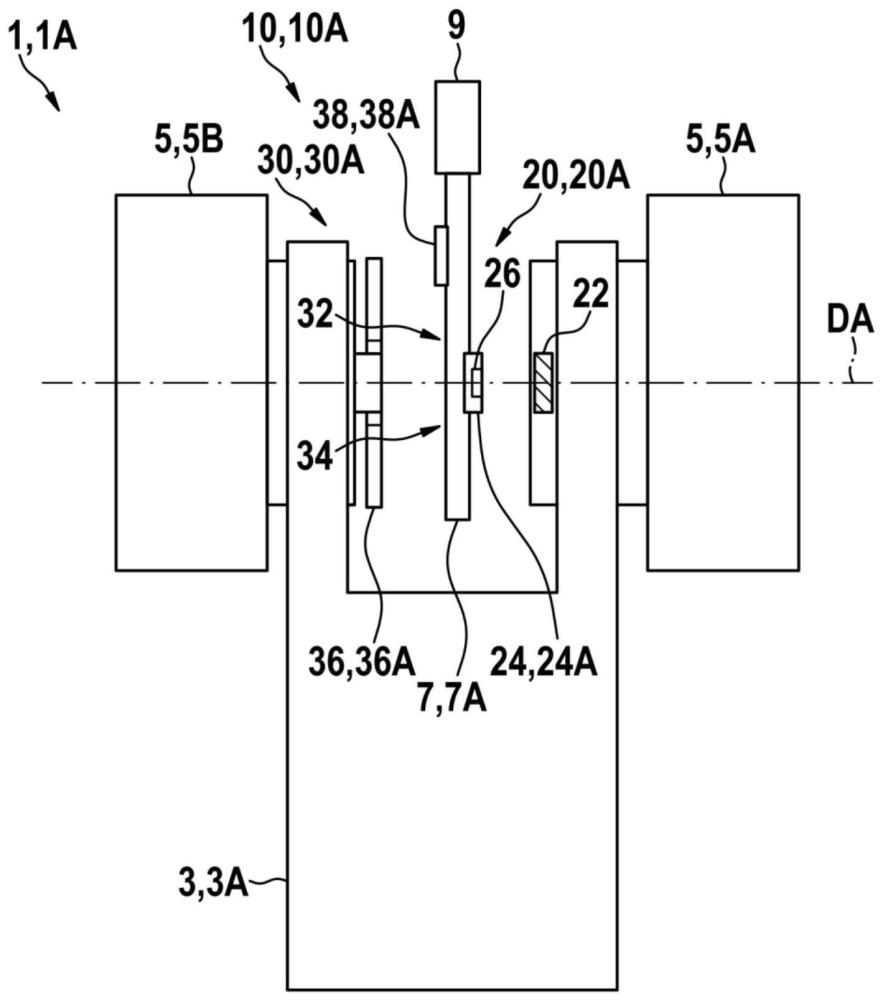
2、本发明的实施方式提供了一种用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的传感器组件,所述传感器组件包括至少一个电路载体、第一传感器设备和第二传感器设备,所述第一传感器设备包括布置在所述至少一个电路载体上的第一评估与控制单元并且构造成基于磁性测量原理来采集可围绕旋转轴线旋转的物体的旋转角度,所述第二传感器设备包括布置在所述至少一个电路载体上的第二评估与控制单元并且构造成基于感应测量原理来采集可围绕旋转轴线旋转的物体的旋转角度。在此,第一传感器设备的磁体和第二传感器设备的耦合设备分别与可旋转的物体不可相对转动地耦合。第一评估与控制单元构造成接收由磁体的旋转运动引起的信号并且生成至少一个第一电测量信号,该第一电测量信号表示可旋转的物体的当前的旋转角度。第二评估与控制单元构造成接收由耦合设备的旋转运动引起的信号并且生成至少一个冗余的第二电测量信号,该第二电测量信号表示可旋转的物体的当前的旋转角度。
3、另外,提出了一种用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的方法,所述方法可通过这种传感器组件来执行。在该方法中,可围绕旋转轴线旋转的物体的旋转角度的、由力或行程偏转(wegauslenkung)引起的变化基于磁性测量原理并且基于感应测量原理进行采集,并且将其分别转换为至少一个对应的电测量信号。通过磁性测量原理生成并处理至少一个第一电测量信号,并且通过感应测量原理生成并处理至少一个冗余的第二电测量信号。一起评估经处理的至少一个第一电测量信号和经处理的至少一个第二电测量信号,以便冗余地求取可旋转的物体的当前的旋转角度。
4、由于磁性测量原理和感应测量原理单纯分辨旋转角度,所以可以独立于踏板的力学的项目特定的力-行程-特征线而实现根据本发明的传感器组件的实施方式。由此,根据本发明的传感器组件的实施方式可灵活地使用并且可以适应或用于不同的踏板,例如用于油门踏板或制动踏板或者用于具有不同角度范围的组合式油门与制动踏板,其中,可旋转运动的物体对应于可旋转地支承的踏板杠杆。由此可以在没有机械干预的情况下提供制动信号或加速信号。此外,通过装配变体可以轻松地使硬件适应客户的特定要求。根据客户需求,还可以在至少一个电路载体上针对每种测量原理提供单独的插拔连接部或共同的插拔连接部。
5、评估与控制单元当前可以理解为编辑、处理或评估所采集的传感器信号的电学组件或电路。优选地,第一评估与控制单元和第二评估与控制单元可以分别构造为asic模组(asic:专用集成电路)。此外,所使用的磁性测量原理以及所使用的感应测量原理均基于差分测量原理,以便优化传感器组件的电磁兼容性(emv)。这意味着当客户的电磁兼容性(emv)要求高时,采用差分测量原理。根据可旋转运动的物体的范围内的emv负载,也可以使用非差分的测量原理。评估与控制单元可以具有至少一个接口,其可以是硬件形式的和/或软件形式的。在硬件形式的构造的情况下,所述接口可以例如是asic模组的一部分。然而,所述接口也可以是单独的集成电路或至少部分地由分立的结构元件组成。在适于软件的构造的情况下,所述接口可以是软件模块,其例如与其他软件模块一起存在于微控制器上
6、通过在从属权利要求中列出的措施和改进方案可以对在独立权利要求1中给出的用于冗余地求取可围绕旋转轴线旋转的物体的旋转角度的传感器组件进行有利的改进。
7、特别有利的是,第一传感器设备可以构造为具有磁性角度传感器元件的磁性传感器,该磁性角度传感器元件朝向可旋转的磁体并且集成在第一评估与控制单元中。由此可以特别节省空间地实现第一传感器设备。
8、在传感器组件的有利的设计方案中,第二传感器设备可以构造成具有至少一个励磁结构和至少一个接收结构的感应传感器,其朝向可旋转的耦合设备。这样所述至少一个励磁结构可以与至少一个振荡器电路耦合,该振荡器电路在运行期间将周期性的交变信号耦合到所述至少一个励磁结构中。耦合设备可以构造成影响所述至少一个励磁结构和所述至少一个接收结构之间的感应耦合。此外,所述至少一个接收结构可以具有至少一个接收线圈,该接收线圈具有周期性重复的环形结构(schleifenstruktur)。通过在所述至少一个电路载体自身上复制接收器结构,可以同类冗余地实施感应测量原理。为了测量,两种接收器结构可以使用同一耦合设备。结合磁性测量原理,当使用仅一个电路载体时由此带来总共三重冗余。由此可以在识别到测量信号不可信时执行选择过程以提高系统的可用性。
9、在传感器组件的另外的有利的设计方案中,所述至少一个电路载体可以布置在可旋转的物体的旋转轴线上。在此可以由两个旋转支承件确定旋转轴线。这意味着所述至少一个电路载体优选地布置在两个旋转支承件之间并且可以构造为多层印刷电路板。此外,所述至少一个电路载体优选地能够实现针对各个测量原理来说分开的供电和/或接地,例如通过使用多个层和铜表面来实现。
10、在传感器组件的另外的有利的设计方案中,第一评估与控制单元和第二评估与控制单元可以布置在所述至少一个电路载体的不同侧上。在这种情况下,磁体可以与第一旋转支承件相连接并且耦合设备可以与第二旋转支承件相连接。替代地,第一评估与控制单元和第二评估与控制单元可以共同地布置在所述至少一个电路载体的一侧上。在这种情况下,磁体和耦合设备可以共同地与旋转支承件之一相连接,其中,磁体优选地集成到耦合设备中。这使得能够特别节省空间地实现根据本发明的传感器组件。
11、在传感器组件的另外的有利的设计方案中,磁体可以是多极的,并且耦合设备可以具有一定数量的导电的耦合段。在这种情况下,第一电测量信号的第一周期性基于磁体的极的数量,并且第二测量信号的第二周期性基于导电的耦合段的数量。这样,例如导电的耦合段的数量可以对应于第一测量信号的第一周期性。此外,磁体的极偶的数量可以对应于第二测量信号的第二周期性。所使用的磁体例如可以是圆形薄盘。当然,磁体也可以具有其他形状,例如椭圆形、有角形等。优选地可以使用多极磁体。根据信号分辨率的要求,可以调整极偶的数量。磁铁可装配在旋转支承件之一中。在操作踏板杠杆时,磁铁旋转。所述至少一个电路载体上的评估与控制单元检测当前旋转的磁体的信号并将旋转转换成具有关于踏板杠杆的旋转角度或偏转的信息的电学信号。用于感应测量原理的耦合设备,其也可以称为标靶,可以优选地构造为转子并且通常由铝制成,所述转子具有特定数量的翼片作为导电耦合段。不过也可以使用其他导电材料。翼片的数量可以适应于待分辨的角度范围的要求。优选地,在待采集的旋转角度所要求的单值性范围允许的范围内提高周期性。如同磁体,耦合设备可以安置到旋转支承件上。耦合设备的旋转可以由所述至少一个电路载体上的所述至少一个接收结构和第二评估与控制单元来分辨并且转换成至少一个电测量信号。
12、在传感器组件的另外的有利的设计方案中,第一电测量信号的周期性和第二测量信号的周期性可以是不同的,从而可以实现游标原理(nonius-prinzip)。于是例如可以预先给定由耦合设备的周期性和磁体的周期性限定的待求取的旋转角度的单值性范围,从而使得第一传感器设备的可采集的旋转角度范围和第二传感器设备的可采集的旋转角度范围分别本身完全覆盖待求取的旋转角度的预先给定的角度范围。由此,游标原理可以通过由感应测量原理求取的旋转角度和由磁性测量原理求取的旋转角度的数学组合来提高所计算的游标旋转角度的分辨率。如果测量原理之一失效,则可继续通过两种测量原理之一以降低的分辨率直接提供可旋转的物体的旋转角度。
13、替代地,可以通过耦合设备的周期性和磁体的周期性来预先给定待求取的旋转角度的限定的单值性范围,从而使得第一传感器设备的可采集的旋转角度范围和第二传感器设备的可采集的旋转角度范围分别本身小于待求取的旋转角度的预先给定的角度范围。由此,游标原理可以提高所计算的角度的分辨率,并且此外通过各测量原理的更高可能的周期性能够实现更小的角度误差。如果测量原理之一失效,则无法再单值性地确定可旋转的物体的旋转角度,但可以通过一个或多个评估与控制单元中的“考虑在内”来修正为单值性的角度,直至消除失效。
- 还没有人留言评论。精彩留言会获得点赞!