一种高精度动中通卫星跟踪方法
本发明属于无线通信,具体涉及一种基于通信载波检测和神经网络进行误差抑制方法,获得最优通信波束方向,在“动中通”应用场景中实现更高精度的卫星动态跟踪。
背景技术:
1、随着信息技术、物联网、人工智能的高速发展,移动通信需要传输的数据量越来越大,人们迫切需要在各种环境下实时收发大量语音、数据、图像、视频等多媒体信息,卫星通信作为传统地面通信的有效补充和延伸,在传统地面通信网络难以覆盖的海洋、荒漠、偏远山区等场景发挥不可替代的作用,可实现网络信息全球无缝隙覆盖,在航空、航海、陆地、轨道交通等领域应用广泛。为了满足卫星通信在上述应用场景的使用,具备“动中通”(satellite communications on the move,sotm)功能的卫星通信设备成为必然选择。面对诸如颠簸的路面、大风浪的海况、空中不稳定气流等各种严苛的使用环境,对动中通系统设计提出了严峻的挑战。
2、传统动中通系统主要由抛物面天线、机械伺服机构和调制解调器组成,采用卫星导航+惯性导航进行定位和姿态测量,通过卫星信标信号跟踪的方式实现持续的动态跟踪,连接卫星调制解调器,在持续对准卫星的情况下实现宽带通信。随着相控阵动中通系统的快速发展,低轮廓小型化的动中通天线摆脱了传统动中通的三轴电机伺服系统的束缚,令动中通系统更小型化和易于安装使用,为卫星移动通信的发展注入强劲动力。
3、然而,无论是传统机械式动中通天线还是电扫描相控阵天线,为实现卫星的实时精确对准,都需要对卫星信标信号进行变频、采样、扫描寻找最优电平值。由于信标信号和卫星通信载波信号的频率一般相隔较远,对于传统机械式动中通天线而言,需要制作信标接收机采集信标信号;但是对于电扫描相控阵天线而言,由于相控阵天线阵面的阵元、阵元间距、移相量往往是针对通信载波频率设计计算,对于某些卫星信标信号和卫星通信载波信号的频率相隔较远的情况下,将无法同时接收通信和信标信号。如仍然需要动态跟踪信标信号则必须设计另外一副天线接收信标信号,再连接信标接收机来完成信标信号的变频和采样等处理。
4、组合导航(卫星导航+惯性导航)的性能决定了动中通系统对自身定位、姿态测量的精度水平。当卫星导航系统受到干扰或者接收卫星导航信息信号异常时,以及惯性导航系统随着时间的推移,诸如漂移等误差会越来越大,都会导致位置和姿态测量误差,对于跟踪精度要求较高的某些卫星通信可能导致天线长期处于较低增益对星状态,从而令通信带宽受限甚至通信中断。可见,组合导航的误差抑制将成为提高卫星动态跟踪的关键技术。目前常见的组合导航误差抑制主要采用卡尔曼滤波等方法实现,需要对误差模型进行精确建模,并且由于系统误差具有非线性等特点,卡尔曼滤波误差模型中所涵盖误差源难以很好地描述误差的传播机理,算法运算量较大。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了解决动中通天线卫星信号跟踪依赖信标接收机,并且电扫描相控阵天线对通信载波和信标频点相隔较远情况下需要配备一副专门的信标接收天线等不足之处,本发明提供一种高精度动中通卫星跟踪方法。使用通信载波能量检测+bp神经网络训练抑制误差的方法,提高卫星动态跟踪性能。该方法能够摆脱动中通天线依赖信标信号进行跟踪,将通信载波信号检测作为神经网络学习训练的数据来源,提高对组合导航的误差抑制能力,实现高精度的卫星跟踪和宽带通信。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种高精度动中通卫星跟踪方法,其特征在于步骤如下:
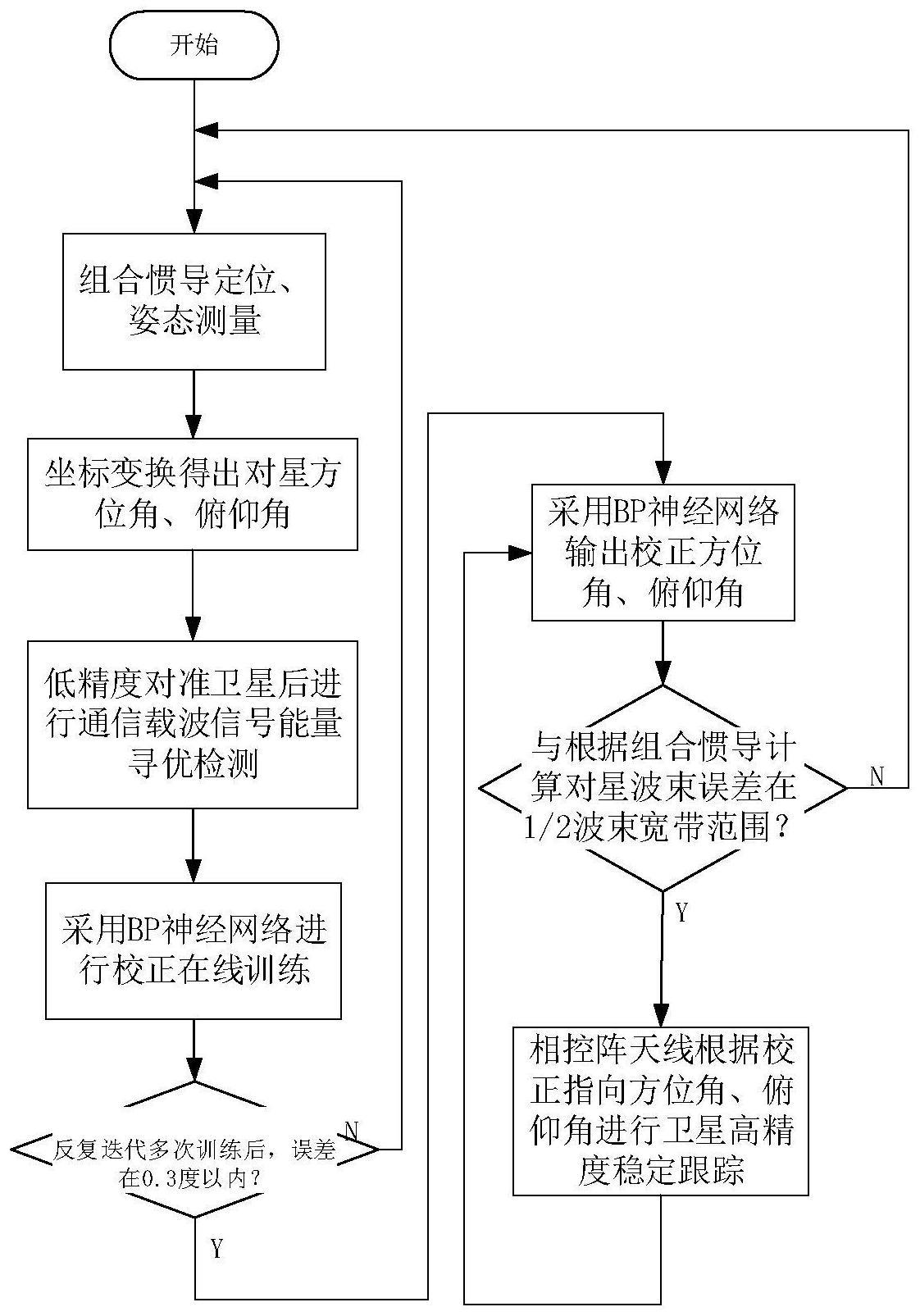
5、将组合导航测量载体姿态值经过坐标变换后得到的基于相控阵平面的对星波束方位角、俯仰角和惯导输出的加速度测量值作为神经网络的输入,根据通信载波能量检测最优通信波束所在的方位角、俯仰角作为神经网络的输出,对神经网络进行在线训练;在完成神经网络在线训练前由组合导航输出测量载体姿态值计算对星波束方位角、俯仰角用于进行较低精度的对星跟踪;
6、当载波能量检测得出的最优波束位置与神经网络推算得出的对星波束位置偏差在阈值范围内时,判定神经网络模型训练达到实用程度,停止训练;后续根据组合导航测量载体姿态值经过坐标变换后得到的基于相控阵平面的对星波束方位角、俯仰角和惯导输出的加速度测量值输入神经网络模型直接得到校正的最优对星波束方位角、俯仰角,从而实现对组合导航误差抑制,完成精确对星跟踪。
7、本发明进一步的技术方案:所述进行较低精度的对星跟踪包括以下步骤:
8、相控阵动中通天线通过组合导航完成初始定位和载体测姿后,根据通信卫星所在的位置,通过坐标变换,计算基于载体坐标对星波束的方位角和俯仰角;
9、相控阵天线根据计算的对星波束的方位角和俯仰角形成对星波束,完成初始对星入网;依靠组合导航周期性输出测量的航向角、俯仰角、横滚角不断更新载体坐标系下对星波束指向,进行较低精度的卫星跟踪。
10、本发明进一步的技术方案:所述计算基于载体坐标对星波束的方位角和俯仰角具体为:
11、设惯导所给出的姿态测量信息为(θ,ρ,ψ),其中θ表示航向角,ρ表示俯仰角,ψ表示横滚角,则卫星位置所在地理坐标系到载体坐标系转换矩阵为:
12、
13、设卫星所在位置经过转换矩阵转换后得到载体坐标系下的坐标为则可求得基于相控阵平面对星波束的方位角α0、俯仰角β0为:
14、
15、
16、本发明进一步的技术方案:所述根据通信载波能量检测最优通信波束所在的方位角、俯仰角包括以下步骤:
17、将天线接收的通信载波信号采用1分2功分器分出一路给载波信号能量检测电路,另一路输出连接到调制解调器进行卫星通信;
18、设计射频滤波电路,将检测信号约束在通信载波所在的带宽以内,采用rf对数检波器电路进行载波能量检测并转换为电平值,配合波束扫描寻优流程,多次多通道高速ad采样电平值并进行平均计算后得到最终采样值;
19、在固定的间隔周期内进行n次小步长波束扫描寻优的载波能量检测,检测出信号能量最强的点的波束方位角和俯仰角标记为α1和β1。
20、本发明进一步的技术方案:所述的神经网络为bp神经网络,包含三层:输入层、隐含层和输出层;其中输入层8个节点,隐含层9个节点,输出层2个节点。
21、本发明进一步的技术方案:还包括当使用神经网络计算精确跟踪对星波束方位角、俯仰角累计达到一定时间后,重新回到载波信号能量测量模式寻找最优通信波束位置,当神经网络与载波信号能量测量得到的最优波束位置偏差达到0.8度时重新进入神经网络训练模式,训练结果偏差在阈值范围内时又回到根据神经网络纠正误差模式,进入精确跟踪。
22、本发明进一步的技术方案:还包括每次输出校正后的对星波束方位角、俯仰角时都对神经网络计算校正值与组合导航测量计算输出值进行偏差比较,当偏差达到相控阵天线3db波束的1/2角度时重新进行神经网络在线训练模式校正。
23、一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
24、一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
25、本发明的有益效果在于:
26、本发明提供的一种高精度动中通卫星跟踪方法,通过基于通信载波信号检测寻优,并结合bp神经网络训练达到抑制组合导航误差的目的,提高卫星对准动态跟踪精度,使系统可长期工作在相控阵天线较高增益处进行更高带宽的高速通信。具有以下优点:
27、首先,提出了利用相控阵天线快速改变天线波束方向的优点,通过对通信载波信号检测寻找对星增益最高的通信波束方向,并以此作为精确跟踪目标用于神经网络的训练。
28、其次,由于动中通系统在复杂多变的工作环境中,不可避免地含有各类噪声,难以建立精确误差模型,而神经网络无需建立精确的数学模型,本身具有的非线性、自组织和自学习能力对处理非线性特性的系统误差有天然优势。以组合导航测量载体姿态值经过坐标变换后得到的基于相控阵平面的对星波束方位角、俯仰角和惯导输出的角速度、加速度测量值作为神经网络的输入,根据通信载波能量检测最优通信波束所在的方位角、俯仰角作为神经网络的输出,对三层bp神经网络进行在线训练,神经网络训练完成后可实时给出最优通信波束方向。与以往通过对惯性导航、卫星导航输出的速度、位置作差,使用卡尔曼滤波或结合神经网络进行误差估计的方法不同,本发明无需建立精确的误差数学模型,而是采用通信载波信号检测寻找最优通信方向作为训练样本,最终直接获得校正对星波束方位角、俯仰角用于更高精度的对星跟踪,相控阵天线波束可始终处于较高增益工作状态,从而使系统进行更高带宽通信。
29、最后,采用本发明可以摆脱相控阵天线卫星跟踪对信标信号的依赖,不需要专门的信标接收天线和信标跟踪设备,简化了系统设计,特别适用于通信载波和信标频率相隔较远甚至无信标信号的应用场合;并且可选取精度较低的组合导航用于系统设计,依靠本发明实现较好的误差抑制。这些特点都有利于降低系统成本和相控阵天线的一体化、小型化设计。
- 还没有人留言评论。精彩留言会获得点赞!