一种基于事件相机和激光辅助照明的振动频率测量方法
本发明涉及非接触式振动频率测量,具体涉及一种基于事件相机和激光辅助照明的振动频率测量方法。
背景技术:
1、振动频率测量是模态分析和工作状态监测的关键技术手段。传统的振动频率测量方法包括接触式测量方法和非接触测量方法。其中接触式测量方法需使用接触式传感器,例如位移传感器、加速度传感器等,具有测量简单、便捷的特点。然而在一些情况下,接触式测量存在明显缺陷,例如接触式振动测量需要将传感器布置于振动对象上,对于轻质对象易造成质量负载效应,产生测量误差;同时,对于高温物体、带电设备以及大型设备的多点或全局振动测量,接触式传感器无法接触被测物体或不能大规模部署。而非接触式测量无需接触振动对象,在上述场景中的测量更有优势,具有多点测量、精度高、适应性强等特点,方法包括激光测量、视觉测量。然而现有的非接触式测量方法仍具有缺陷,例如激光测量虽然精度较高,但价格较高,且对物体振动模式有严格要求;而视觉测量一般利用基于帧的传统相机拍摄振动物体,当物体振动频率较高时,易受运动模糊的干扰。虽然使用高速相机能够减少运动模糊的干扰,但其价格较高,且数据冗余,计算复杂。
2、事件摄像机是一种仿生视觉传感器,与传统相机不同,它不再以固定的帧率获取图像,而是借助场景中亮度的动态变化进行采样,异步测量每个像素的亮度变化,若某个像素的亮度变化超过阈值,就会输出一个事件e=(x,y,p,t),其表示在时间t,像素坐标(x,y)处,产生一个极性为p∈(-1,1)的事件,其中极性表示光强变化的方向,如图1所示。该流式数据具有微秒级的时间分辨率,不会受运动模糊的影响,因此事件相机可以高频地编码由物体振动引起的光度变化,进而实现频率测量。然而现有的基于事件的频率测量方法易受环境光变化干扰,且没有明确事件和振动之间的映射关系模型,整体测量范围和测量精度较低,难以实现高精度稳定测量,应用潜力不足。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于事件相机和激光辅助照明的振动频率测量方法,解决了现有技术中高精度频率测量的精度受限的问题。本发明基于事件相机的光强感知原理,结合激光辅助照明进行振动频率测量,并利用混合高斯分布来拟合事件振动的频率分布,准确计算对象振动频率,能够实现对任意振动模态对象的高精度、多点分布式振动频率测量,且不受环境光变化干扰,测量振动频率范围大。
2、本发明提供了一种基于事件相机和激光辅助照明的振动频率测量方法,包括:
3、s1、采用激光照射振动对象的表面,在所述对象表面获得光强分布区域;
4、s2、利用事件相机拍摄所述光强分布区域,获取振动对象光强分布区域内产生的事件和所述事件的时间序列,依据时间序列获得事件时间间隔;
5、s3、依据所述事件获得事件的极性周期性变化次数;所述极性变化周期为由正极到负极再到正极,由负极到正极再到负极在光强分布区域交替一次;
6、s4、将所述光强分布区域映射为所述对象的振动区域,基于所述事件的极性周期性变化次数和事件时间间隔计算光强分布区域内的振动频率;
7、s5、对所述对象的振动频率进行拟合,计算得出振动对象的表面整体振动频率。
8、优选的,步骤s1所述光强分布区域为光强稳定分布区域,具体包括:具体包括:激光照射到振动对象表面之后,形成一个被辐照区域,将所述被辐照区域表征为光强稳定分布区域。
9、优选的,步骤s1所述利用激光照射振动对象表面产生的稳定光强分布,可极大地抑制环境光变化对事件相机的干扰,提高可靠性,振动对象表面一些振幅很小,不能触发事件的振动,可以形成触发事件。
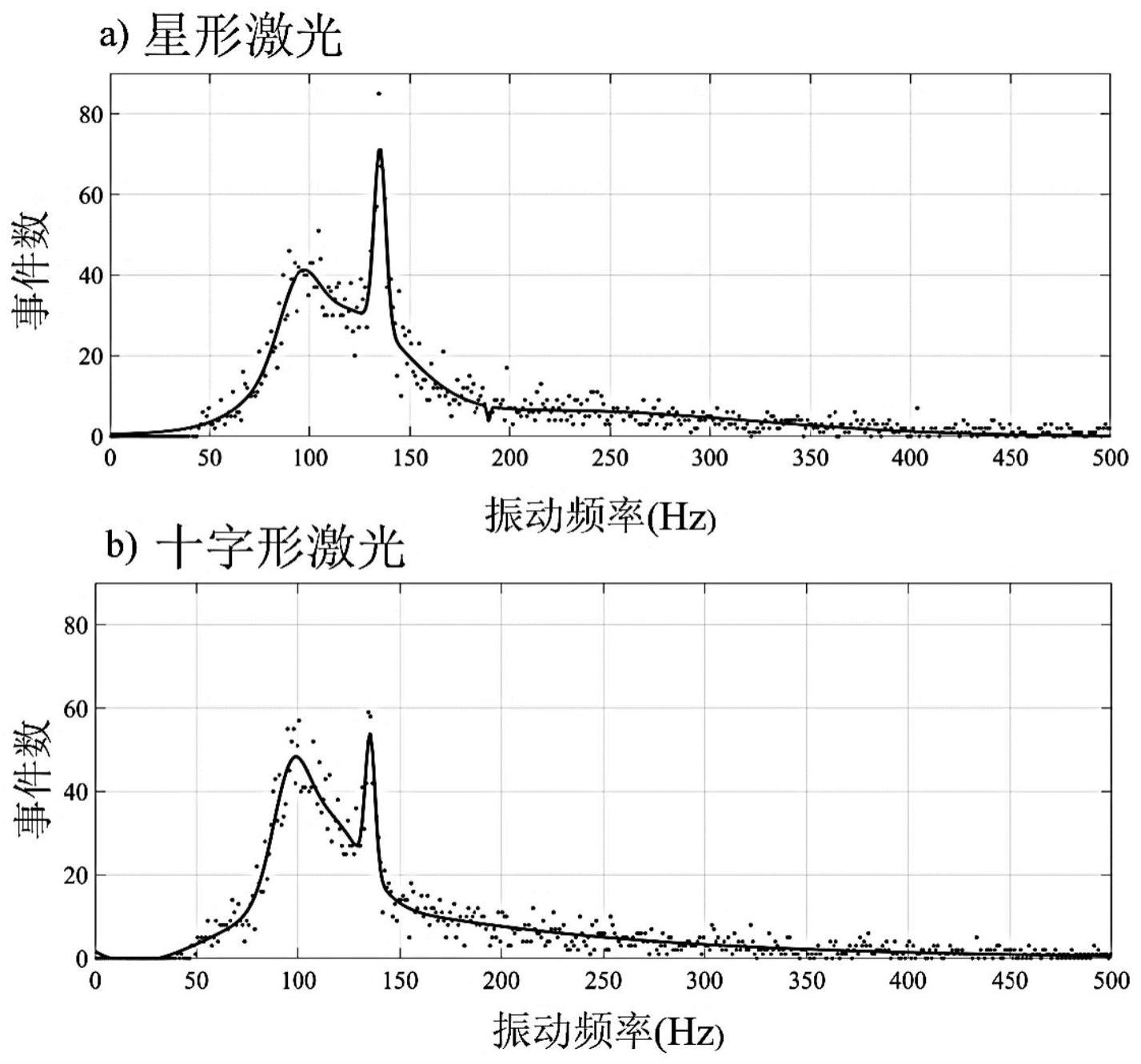
10、优选的,步骤s1所述激光的形状为十字形激光、米字形激光、网格形激光中的任意一种,通过改变激光照射形状可提升辐照范围,进一步满足不同物体形貌表面的频率测量需求,提高测量准确性;
11、步骤s1所述激光的发射器的个数根据振动对象的表面积大小设置;
12、当振动对象表面积为第一预设面积时,在被辐照区域中激光的形状为十字形,设置1个十字形激光发射器;
13、当振动对象表面积在第二预设面积时,在被辐照区域中激光的形状为米字形,设置n个十字形激光发射器,n个十字形激光发射器发射的n条十字形的激光在被辐照区域形成一个交点;
14、当振动对象表面积大于第三预设面积时,在被辐照区域中激光的形状为网格形激光时,设置n个十字形激光发射器,n个十字形激光发射器发射的n条十字形的激光在被辐照区域进行垂直方向和水平方向的拼接形成网格形,水平方向保持等间隔平行,垂直方向保持等间隔平行。
15、进一步的,步骤s1所述激光的发射器的个数根据振动对象的表面积大小设置,具体包括:
16、当振动对象表面积为0-0.25m2时,需要在被辐照区域中激光的形状为十字形,设置1个十字形激光发射器;振动对象被测量振动区域为十字形的中心交点和四个顶点;
17、当振动对象表面积在0.25-4m2时,需要在被辐照区域中激光的形状为米字形,设置n个十字形激光发射器,n个十字形激光发射器发射的n条十字形的激光在被辐照区域形成一个交点,2≤n≤10;振动对象被测量振动区域为米字形的中心交点和多个顶点;
18、当振动对象表面积大于4m2时,需要在被辐照区域中激光的形状为网格形激光时,设置n个十字形激光发射器,n个十字形激光发射器发射的n条十字形的激光在被辐照区域进行垂直方向和水平方向的拼接形成网格形,水平方向保持等间隔平行,垂直方向保持等间隔平行,n≥2;振动对象被测量振动区域为网格形垂直方向和水平方向的交点和多个顶点。本发明技术方案根据振动物体的表面积大小设置激光器的个数可实现多点测量和分布式测量,提高测量效率,满足不同物体的振动频率测量需求。
19、优选的,步骤s1所述激光包括:氩激光、氦氖激光、罗丹明6g染料、红宝石(cralo3);所述氩激光为波长488nm的蓝光,氩激光为波长514nm的绿光,氦氖激光为波长633~635nm的红光,罗丹明6g染料为波长570-650nm的可调光,红宝石(cralo3)为波长694nm的红光。
20、本发明技术方案利用激光照射振动物体表面,在照射区域产生稳定的光强分布,可极大地抑制环境光变化对事件相机的干扰,提高可靠性;通过改变激光照射形状,或增加激光器个数来实现多点测量和分布式测量,提高测量效率,满足不同物体的振动频率测量需求;基于事件相机和激光辐照的测量方法不受运动模糊的影响,可对任意振动模态的物体进行振动频率测量,适应能力强,同时具有低功耗和低成本的优点,计算数据量小且计算精度高。
21、优选的,步骤s2所述获得事件时间间隔具体包括:利用事件相机拍摄所述光强分布区域,获取振动对象光强分布区域内产生的事件,所述事件为时间序列数据,依据时间序列的时长获得时间间隔,通过时间间隔选取时间序列数据计算振动频率;所述时间间隔满足奈奎斯特采样定律。
22、优选的,步骤s3所述极性周期性变化特征具体包括:所述产生事件的极性包括正极性和负极性,正极性和负极性事件在光强分布区域交替产生,将正极性事件和负极性事件表征为振动引起的光强交替变化,将所述光强交替变化表征为事件的极性周期性变化特征。
23、优选的,步骤s4所述频率计算方法可适用于振动对象上下、左右、前后方向的振动情况,例如周向振动、径向振动。
24、本发明技术方案采用激光照射振动对象表面克服了环境光对事件相机的干扰,当物体振动时,由于物体表面的非均匀性,无论物体具有怎样的振动方向与振动模式,该区域均会产生对应光强变化。
25、优选的,步骤s5对所述对象的振动频率进行拟合,计算得出振动对象表面的整体振动频率的具体步骤为:
26、采用混合高斯分布模型对光强分布区域的振动频率进行拟合,获得总频率;
27、依据所述总频率获取总频率的概率密度函数,基于所述总频率的概率密度函数和总频率建立高斯混合模型;
28、引入期望最大化算法(em算法)迭代计算所述高斯混合模型,将所述总频率输入高斯混合模型,获得振动对象表面的整体振动频率。
29、进一步的,所述拟合过程如图3所示;所述总频率符合一个混合高斯分布,表达式为:
30、
31、其中,f为振动对象的振动总频率;fba为振动对象的振动背景噪声频率,fs为振动对象的振动频率,为振动对象的振动背景事件频率,i为第i个高斯分布,i=1,2,3…i,i为高斯分布的总个数。
32、所述总频率的概率密度函数,表达式为:
33、
34、其中,y(f)为振动对象的振动总频率的概率密度函数,pi为第i个高斯分布的振动频率的权重系数,满足i个高斯分布的振动频率的权重系数和为1,i≥2,p1为第1个高斯分布的权重系数,p2为第2个高斯分布的权重系数;
35、为振动对象的振动背景噪声频率分布,μba为振动对象的振动背景噪声频率的数学期望,为振动对象的振动背景噪声频率的方差;为振动对象的振动频率分布,μs为振动对象的振动频率数学期望,为振动对象的振动频率的方差;为振动对象的振动背景事件的频率分布,μi为第i个高斯分布的振动对象的振动背景事件的频率的数学期望,为第i个高斯分布的振动对象的振动背景事件概率的方差;i=1,2,3…i,i为高斯分布的总个数。
36、进一步的,所述高斯分布的数量由小到大不断增加,直到拟合的混合高斯分布与实际分布之间的相似度满足要求,即相似度大于等于0.95,拟合得到的混合高斯分布的均值即为整体振动频率,拟合结果如图4所示。
37、进一步的,所述引入期望最大化算法(em算法)迭代计算所述高斯混合模型具体包括:
38、建立振动对象表面总频率的对数似然函数;
39、将0.2-10hz范围内产生的振动频率平均值设为背景噪声频率的期望初始值,初始化设置振动对象表面总频率的对数似然函数,在所述初始化设置后的振动对象表面总频率的对数似然函数中引入隐变量,获得更新对数似然函数;
40、进行em算法的期望步(e步),求解所述更新对数似然函数,找到更新对数似然函数的期望值;
41、进行em算法的极大步(m步),计算所述关于期望值的最大值;
42、对所述期望值和最大值进行e步和m步的迭代计算,直到极大似然估计(mle)收敛,获得最终的收敛值,将所述最终的收敛值表征为振动对象表面的整体振动频率。
43、更进一步的,所述振动对象表面总频率的对数似然函数,表达式为:
44、
45、其中,l(θ)为振动对象的振动总频率的对数似然函数;pi表示第i个高斯分布的振动频率权重系数,μi为第i个高斯分布的背景事件的频率的数学期望,为第i个高斯分布的背景事件概率的方差;fi表示第i个高斯分布的振动频率,p(fi,θ)表示第i个高斯分布频率分布的概率密度函数,ln(p(fi,θ))表示对数概率密度函数,i=1,2,3...i,i为高斯分布的总个数。所述更新对数似然函数,表达式为:
46、
47、其中,l(θ;f,z)为更新对数似然函数;z为隐变量;f为振动对象的振动总频率;pi表示第i个高斯分布的振动频率权重系数,μi为第i个高斯分布的振动对象的振动背景事件的频率的数学期望,为第i个高斯分布的振动对象的振动背景事件概率的方差;fi表示第i个高斯分布的振动频率,p(fi,z;θ)表示更新各项频率分布的概率密度函数,ln(p(fi,z;θ))表示更新对数概率密度函数,i=1,2,3...i,i为高斯分布的总个数。
48、优选的,所述隐变量为振动对象的振动背景事件的频率的数学期望μ和/或振动对象的振动背景事件概率的方差σ2。
49、所述进行em算法的期望步(e步),求解所述更新对数似然函数,找到期望值,表达式为:
50、q(θ,θ(t))=ez(l(θ;f,z))
51、其中,ez(l(θ;f,z))为更新对数似然函数期望的计算公式;q(θ,θ(t))为更新对数似然函数的期望值,t为迭代次数,l(θ;f,z)为更新对数似然函数,θ为一组参数,即其表示各个频率高斯分布的参数,pi表示第i个高斯分布的振动频率权重系数,μi为第i个高斯分布的振动对象的振动背景事件的频率的数学期望,为第i个高斯分布的振动对象的振动背景事件概率的方差;z为隐变量;f为振动对象的振动总频率。
52、本发明技术方案的测量范围广,测量精度高,本发明测量的振动频率下界主要由环境光噪声和事件相机噪声决定,在0.2hz到10hz之间。而频率测量的上界由事件相机的时间分辨率、物体振动的振幅以及振动在像面的位移决定。目前在售的事件相机的时间分辨率约为6μs到400μs。根据采样定理,事件相机所能捕捉到的理论频率上限在1250hz~83333hz之间。而物体的振幅必须大于事件相机图像平面上一个像素的位移,才能产生对应事件,因此对于具有高频微小振幅的物体而言,可减少相机与物体的距离或采用长焦镜头来提高测量频率范围。一般情况下可实现20hz~1000hz的振动频率测量,平均误差不超过7‰。
53、与现有技术相比,本发明至少具有如下有益效果:
54、(1)本发明利用激光照射振动物体表面,从而在照射区域产生稳定的光强分布,可极大地抑制环境光变化对事件相机的干扰,提高可靠性;
55、(2)本发明相比于传统的视觉测量振动方法,事件相机和激光辐照配合使用进行测量,不受运动模糊的影响,可对任意振动模态的物体进行振动频率测量,适应能力强,同时具有低功耗和低成本的优点,计算数据量小且测量精度高;
56、(3)本发明可通过改变激光照射形状,或增加激光器个数来实现多点测量和分布式测量,提高测量效率,满足不同物体的振动频率测量需求;
57、(4)本发明在进行多点测量和分布式测量时,采用混合高斯分布模型对所有测量频率进行拟合,计算方法采用期望最大化算法(em迭代算法),能够准确计算出整体振动频率,提高测量精度;
58、(5)本发明技术方案的测量范围广,测量精度高。
- 还没有人留言评论。精彩留言会获得点赞!