一种电驱动系统传动偏差测算方法及辅助测量装置与流程
本发明涉及电驱动系统,特别是一种电驱动系统传动偏差测算方法及辅助测量装置。
背景技术:
1、如图1所示,电驱动传动系统一般包括电机转子101,齿轮箱输入轴系102,第一中间轴齿轮103,第二中间轴齿轮106,输出轴系105,输出轴齿轮104组成,传动系统的传动偏差是由101转子轴花键与102齿轮箱输入轴花键啮合偏差、齿轮箱输入轴齿轮102与第一中间轴齿轮103之间齿轮啮合偏差,第二中间轴齿轮106与输出轴齿轮104之间齿轮啮合偏差累积所造成的。
2、目前行业内对于电驱动系统205传动偏差的测量一般都是在试验台架上进行,如图2所示,利用测功机201及台架机械止动装置202对电驱动输出半轴进行机械锁死,然后转动电机输入轴101并用台架角度传感器207计量电机输入轴的转动角度,所计量的转动角度即代表了电驱动系统的传动偏差角度。
3、但因半轴万向节两端204,203及台架机械锁死装置202、联轴器206等,都会引入额外的转角偏差,齿轮箱输出端105的转角偏差会通过齿轮箱放大到电机输入端101,放大比例等于减速器的减速比,这样输出端微小的转角偏差都会等比例被放大,输出端额外引入的转角偏差严重影响了测量精度。
技术实现思路
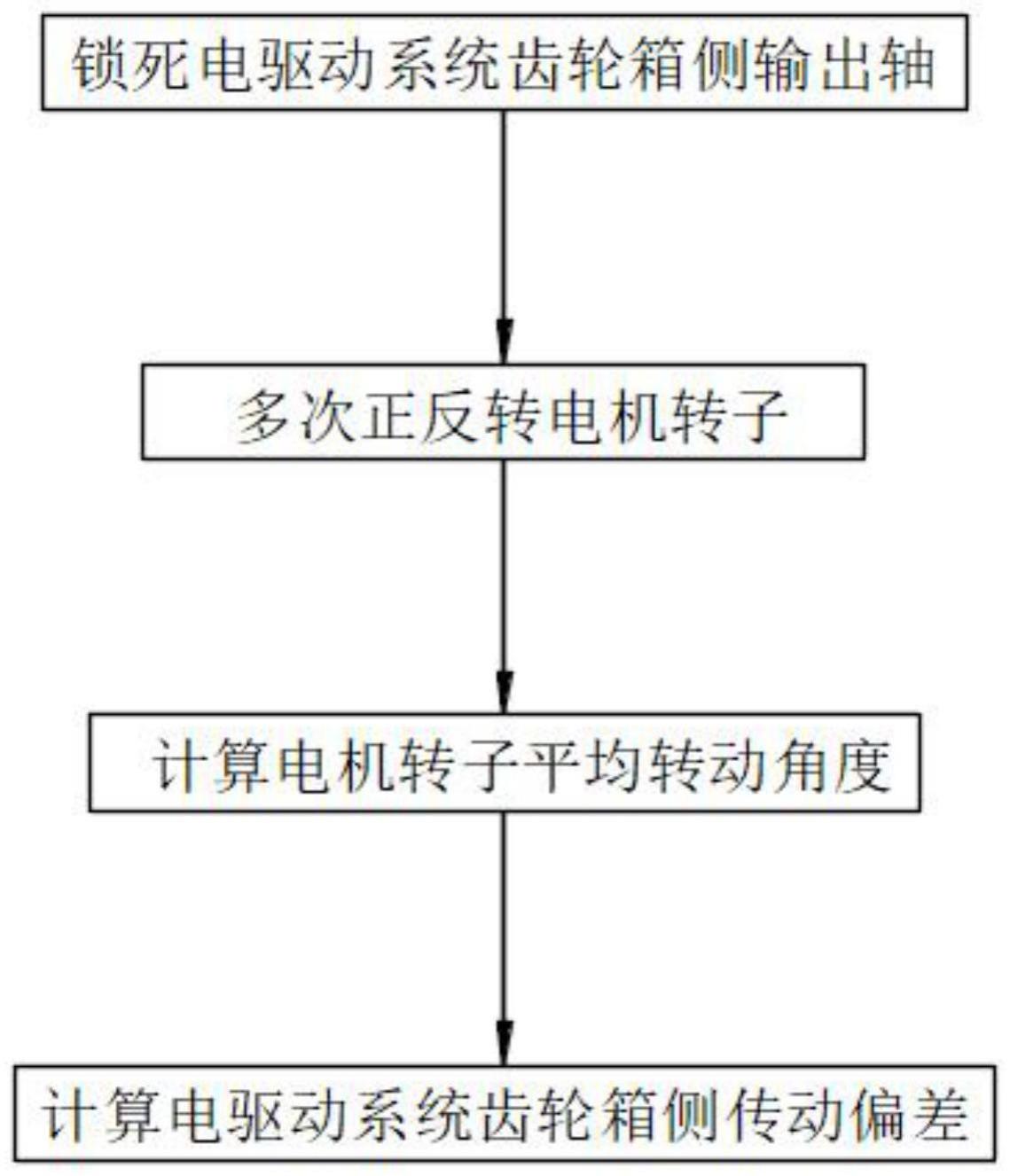
1、本发明公开了一种电驱动系统传动偏差测算方法及辅助测量装置,它通过锁死电驱动系统齿轮箱侧输出轴,测量电机转子的实际转动角度来测算电驱动系统传动偏差。
2、为达到上述目的,一方面,提供一种电驱动系统传动偏差测算方法,具体方法如下:
3、锁死电驱动系统齿轮箱侧输出轴;
4、测算电驱动系统电机侧传动角度偏差;
5、根据电驱动系统电机侧传动角度偏差计算电驱动系统齿轮箱侧传动偏差。
6、该实施例的优点在于,通过锁死电驱动系统齿轮箱侧输出轴,使电驱转子转动,转动的角度既为电驱动系统电机侧传动角度偏差,再通过传动比例换算为电驱动系统齿轮箱侧传动偏差,测量电机转动角度时不会因测试台架机构各部分啮合产生的误差而受到影响,相较于传统的测试台架,可有效提高电驱动系统齿轮箱侧传动偏差的测算准确度。
7、进一步地,所述电驱动系统齿轮箱输出轴包括输出长半轴和输出短半轴;
8、锁死电驱动系统齿轮箱侧输出轴的方式为:分别锁死长半轴和短半轴的输出齿轮。
9、可选地,测算电驱动系统电机侧传动角度偏差,具体方法为:
10、锁死电驱动系统齿轮箱侧输出轴后,使电驱动系统的电机转子由其中的一个端部正向或反向转动至另一个端部,再转回开始转动的端部;
11、读取电机转子的转动角度,记录为电驱动系统电机侧传动角度偏差。
12、可选地,测算电驱动系统电机侧传动角度偏差,具体方法为:
13、锁死电驱动系统齿轮箱侧输出轴,以相同的转动扭矩分多次,使电驱动系统的电机转子由其中的一个端部正向或反向转动至另一个端部,再转回开始转动的端部;
14、记录转动的次数以及每次转动的角度,相乘累加求平均后记录为电驱动系统电机侧传动角度偏差。
15、作为优选,测算电驱动系统电机侧传动角度偏差,具体方法为:
16、锁死电驱动系统齿轮箱侧输出轴,电机转子从0nm加载到正向预设扭矩,驱动齿轮箱正转,扭矩梯度为正向预设扭矩梯度,当加载达到正向预设扭矩时保持预设时间,读取电机转子的转动角度为第一正向转动角度;
17、电机转子从正向预设扭矩加载到反向预设扭矩,驱动齿轮箱反转,扭矩梯度为反向预设扭矩梯度,当达到反向预设扭矩时保持预设时间,读取电机转子的转动角度为第一反向转动角度;
18、根据第一正向转动角度和第一反向转动角度,计算电驱动系统电机侧传动角度偏差。
19、该实施例的优点在于,正向扭矩和反向扭矩的梯度变化设计,可克服不同情况下的转动阻力,保证电机转子转动角度最化,提高测量准确度。
20、作为优选,根据第一正向转动角度和第一反向转动角度,计算电驱动系统电机侧传动角度偏差具体方法如下:
21、循环正转和反转达到预设次数,对于每次正转和反转,均取第一正向转动角度减去第一反向转动角度的绝对值,对若干绝对值求平均,算得电驱动系统电机侧传动角度偏差。
22、该实施例的优点在于,通过平均值的方式计算电驱动系统电机侧传动角度偏差,可减小测量偏差造成的影响,测得的数据更接近于真实数据。
23、可选地,根据第一正向转动角度和第一反向转动角度,计算最大转动角度具体方法如下:
24、循环正转和反转达到预设次数,分别选取若干正向转动角度中的中位数和若干反向转动角度中的中位数,以正向转动角度中位数减去反向转动角度中位数的绝对值作为电驱动系统电机侧传动角度偏差。
25、选作优选,通过电驱动系统自带的高精度旋变传感器读取电机转子的转动角度。
26、该实施例的优点在于,直接利用电驱动系统自带的高精度旋变传感器记录转子旋转角度,这样也可以省略台架外加的角度传感器,降低了测量设备成本。
27、可选地,将角度传感器安装在电机转子上,通过角度传感器读取电机转子的转动角度。
28、进一步地,根据电驱动系统电机侧传动角度偏差计算电驱动系统齿轮箱侧传动偏差,具体方法如下:
29、以电驱动系统电机侧传动角度偏差除以齿轮箱减速比,算得电驱动系统齿轮箱侧传动偏差。
30、为达到上述目的,另一方面,提供一种电驱动系统传动偏差测算的辅助测量装置,其特征在于,包括外表面设置有外齿的锁止轴,外齿可与电驱动系统齿轮箱侧输出轴的内齿啮合;
31、所述锁止轴的一侧固接在锁止结构上,当电驱动系统齿轮箱侧输出轴转动时,锁止结构可保持不动。
32、作为优选,所述电驱动系统齿轮箱输出轴包括输出长半轴和输出短半轴;
33、所述锁止轴包括两个,两个锁止轴分别固接在一个对应锁止结构上;
34、其中一个锁止结构为l形短半轴锁止工装,锁止轴固接在l形短半轴锁止工装的端部;
35、另一个锁止结构为圆柱形长半轴锁止工装,锁止轴固接在圆柱形长半轴锁止工装的端部;
36、所述l形短半轴锁止工装和圆柱形长半轴锁止工装均可通过螺栓固接在电驱动系统壳体上。
37、该实施例的优点在于,利用自制工装直接锁止齿轮箱输出轴在壳体上,减少了测量步骤,提高了测量效率、降低测量成本。
38、可选地,所述电驱动系统齿轮箱输出轴包括输出长半轴和输出短半轴;
39、所述锁止轴包括两个,两个锁止轴分别固接在一个对应锁止结构上;
40、其中一个锁止结构为l形短半轴锁止工装,锁止轴固接在l形短半轴锁止工装的端部;
41、另一个锁止结构为圆柱形长半轴锁止工装,锁止轴固接在圆柱形长半轴锁止工装的端部;
42、所述l形短半轴锁止工装和圆柱形长半轴锁止工装均固接在用于测量电驱动系统传动偏差的试验台架上。
43、可选地,所述锁止结构包括机械臂,锁止轴安装在机械臂上。
44、需要说明的是,在本文中采用的“第一”、“第二”等类似的语汇,仅仅是为了描述技术方案中的各组成要素,并不构成对技术方案的限定,也不能理解为对相应要素重要性的指示或暗示;带有“第一”、“第二”等类似语汇的要素,表示在对应技术方案中,该要素至少包含一个。
- 还没有人留言评论。精彩留言会获得点赞!