一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置的制作方法
本发明属于自动驾驶汽车功能安全测试,尤其是涉及一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置。
背景技术:
1、随着智能网联汽车和自动驾驶汽车的快速发展,汽车电子控制系统复杂程度大大增加,其安全性是决定智能网联汽车能否落地以及量产的关键性因素。在2011年和2018年,国际标准化组织推出了两版iso 26262功能安全标准,成为指导汽车行业生产的一项安全指南,受到了全行业的高度重视。国内对于汽车的功能安全也非常重视,制定了gb/t 34590功能安全标准。
2、超声波雷达是驾驶辅助系统感知层的关键传感器之一,是汽车自动泊车或倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。利用在汽车后保险杠附近设置的雷达探头,发出和接收超声波,将得到的信号传输到控制器进行分析处理,最后由蜂鸣器根据雷达探头与障碍物之间的距离发出不同的报警声。根据现有功能安全标准要求,在自动泊车辅助系统开启过程中,超声波雷达可能被异物异物遮挡,无法准确感知外界环境,车辆应自动退出泊车辅助功能,车辆刹停,同时向驾驶员发出报警声,避免给驾驶员及行人带来安全风险。因此,设计研发一种自动遮挡超声波雷达设备,模拟超声波雷达被异常遮挡的场景是非常必要的,对自动泊车辅助系统的整车级功能安全测试发展起到了积极作用。
技术实现思路
1、有鉴于此,本发明旨在提出一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,以能够用于自动泊车场景的整车级功能安全测试,具有灵活性强、操作简便和可靠性高的特点。
2、为达到上述目的,本发明的技术方案是这样实现的:
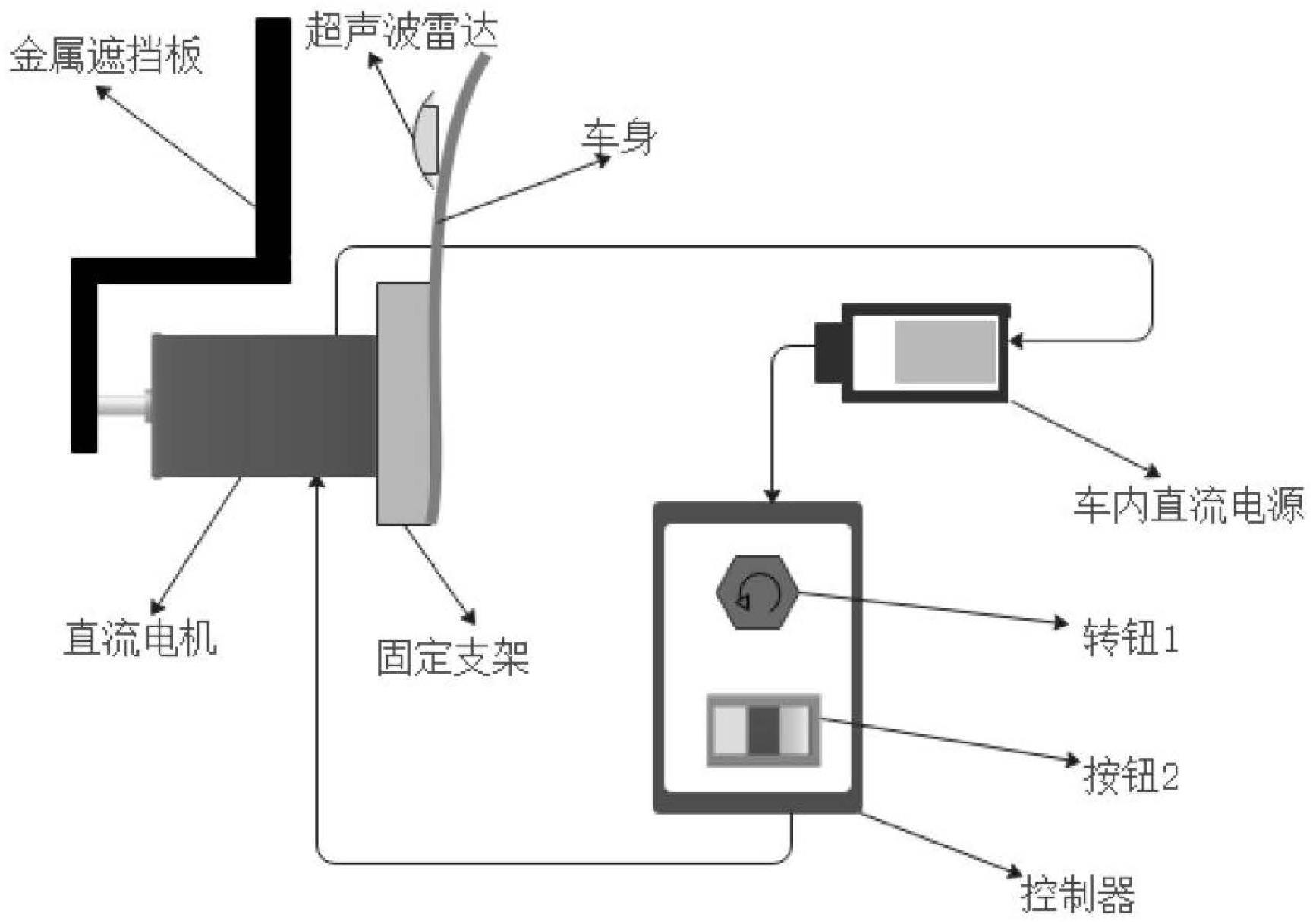
3、一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,包括:固定支架、转动模块和控制系统,所述固定支架用于将转动模块固定在待测超声波雷达的未遮挡位置、遮挡位置,所述转动模用于将金属遮挡板调至待测超声波雷达的未遮挡位置、遮挡位置,所述控制系统用于控制转动模块即遮挡板旋转至合适位置。
4、进一步的,所述固定支架为钢板结构,所述固定支架通过螺栓连接到转动模块。
5、进一步的,所述转动模块包括直流电机和金属遮挡板,所述直流电机的输出轴连接至金属遮挡板一侧,所述金属遮挡板位于待测超声波雷达的未遮挡位置、遮挡位置,所述直流电机信号连接至控制系统。
6、进一步的,所述金属遮挡板为z型结构,所述金属遮挡板的转角处均为直角结构。
7、进一步的,所述控制系统包括控制器电路和控制面板,所述控制器电路板预留点烟器插口,所述控制器电路板通过点烟器插口与车内电源连接,所述控制面板上设有转钮1和按钮2,所述转钮1用于控制直流电机转速,所述按钮2用于控制直流电机正反转。
8、进一步的,遮挡装置的测试方法,包括以下步骤:
9、s1、测试开始,将金属遮挡板装置固定于待测汽车后方,任一超声波雷达附近合适位置;
10、s2、启动待测车辆,进入测试场地;
11、s3、判断是否激活自动泊车功能,是,则进入步骤s4,否,则返回步骤s2;
12、s4、以vm/s车速成功探索到车位;
13、s5、测试人员控制遮挡装置,进行故障注入,完成超声波雷达遮挡;
14、s6、观察车辆的安全机制是否起作用,是,则进入步骤s9,否,则进入步骤s7;
15、s7、本次功能安全测试不通过;
16、s8、进行功能修改后,返回步骤s1;
17、s9、本次功能安全测试通过,测试结束。
18、进一步的,遮挡装置的控制逻辑,包括以下步骤:
19、a1、测试开始,调整遮挡板位置;
20、a2、系统激活,稳定执行自动泊车功能;
21、a3、开启控制器,遮挡超声波雷达;
22、a4、判断系统是否退出,是,则进入步骤a7,否,则进入步骤a5;
23、a5、车辆继续执行自动泊车功能;
24、a6、控制结束;
25、a7、开启控制器,控制遮挡板离开;
26、a8、判断系统是否重新激活,是,则进入步骤a9,否,则进入步骤a6;
27、a9、车辆继续执行自动泊车功能;
28、a10、控制结束。
29、相对于现有技术,本发明所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置具有以下优势:
30、本发明所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,本发明在自动泊车辅助驾驶过程中注入超声波雷达遮挡故障,进行整车级功能安全测试中具有较强的可执行性,并且故障注入时机及时间可控性强,实现对自动泊车系统安全目标的验证,具有较高的可靠性。
技术特征:
1.一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:包括:固定支架、转动模块和控制系统,所述固定支架用于将转动模块固定在待测超声波雷达的未遮挡位置、遮挡位置,所述转动模用于将金属遮挡板调至待测超声波雷达的未遮挡位置、遮挡位置,所述控制系统用于控制转动模块即遮挡板旋转至合适位置。
2.根据权利要求1所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:所述固定支架为钢板结构,所述固定支架通过螺栓连接到转动模块。
3.根据权利要求1所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:所述转动模块包括直流电机和金属遮挡板,所述直流电机的输出轴连接至金属遮挡板一侧,所述金属遮挡板位于待测超声波雷达的未遮挡位置、遮挡位置,所述直流电机信号连接至控制系统。
4.根据权利要求3所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:所述金属遮挡板为z型结构,所述金属遮挡板的转角处均为直角结构。
5.根据权利要求3所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:所述控制系统包括控制器电路和控制面板,所述控制器电路板预留点烟器插口,所述控制器电路板通过点烟器插口与车内电源连接,所述控制面板上设有转钮1和按钮2,所述转钮1用于控制直流电机转速,所述按钮2用于控制直流电机正反转。
6.根据权利要求3所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:遮挡装置的测试方法,包括以下步骤:
7.根据权利要求3所述的一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,其特征在于:遮挡装置的控制逻辑,包括以下步骤:
技术总结
本发明提供了一种自动驾驶汽车功能安全测试用超声波传感器遮挡装置,包括:固定支架、转动模块和控制系统。本发明有益效果:本发明在自动泊车辅助驾驶过程中注入超声波雷达遮挡故障,进行整车级功能安全测试中具有较强的可执行性,并且故障注入时机及时间可控性强,实现对自动泊车系统安全目标的验证,具有较高的可靠性。
技术研发人员:刘磊,夏显召,张宏伟,王宇,秦孔建,张鲁,邵学彬,张胜强,李瑞秋,李明阳,李予佳,董长青,姜国凯,付越,张珊,郭魁元
受保护的技术使用者:中汽研软件测评(天津)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!