直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置及其成像方法
本发明属于红外光热成像领域,具体涉及一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置及其成像方法。
背景技术:
1、复合材料具有高比模量、高比强度、抗腐蚀性以及良好的可设计性等优异性能,近年来被广泛应用于航空航天领域。当前在主流直升机中,其旋翼系统中的旋翼桨叶、旋翼桨毂以及尾浆等采用复合材料,例如碳/玻璃纤维增强复合材料c/gfrp,机体结构也大面积采用复合材料。直升机中某些关键部件如旋翼系统,旋翼桨叶承受的疲劳载荷较大,其破坏往往会导致灾难性事故。直升机空中飞行状态复杂,其中多数零部件在飞行过程中处于运动状态。零部件在足够大的交变载荷的多次作用下,容易诱发疲劳破坏。通常在这种破坏之前,构件往往没有变形征兆,而是直接形成疲劳裂纹。在交变载荷作用下,裂纹会以一定速率扩展,构件截面逐渐削弱,削弱到极限时,构件会突然断裂,形成疲劳破坏,危机直升机的飞行安全。复合材料直升机旋翼桨叶主要由两个原因诱发疲劳破坏,第一种为受到外力因素造成损伤,第二种为复合材料桨叶在制备、铺贴及固化过程中产生的损伤,如脱粘、压陷、空隙、疏松、夹杂、富胶以及贫胶等问题。直升机旋翼桨叶常见失效形式如图1所示。
2、因此,为了满足军用/民用直升机全天候复杂环境下快速原位检测与诊断装备发展需求,极为迫切需要开发一种面向直升机旋翼桨叶维护的快速可靠无损检测与诊断技术及装备,解决目前直升机复合材料核心部件缺陷或损伤难于原位快速识别、准确定位及尺寸定量等难题。目前针对直升机桨叶常规检测方法如图2所示。
3、在已有研究中,目前针对直升机旋翼桨叶复合材料(c/gfrp)表面裂纹以及内部缺陷/损伤主要检测方法包括,目视检查法、敲击检查法、渗透检测法、x射线检测技术、电涡流检测法、超声检测技术、以及红外热成像检测技术等方法。
4、尽管现有方法对于直升机旋翼桨叶检测均进行了一定程度的应用,但是这些方法也存在适用性与局限性。其中目视检查法仅用于外表较为明显的缺陷检测,如表面划伤、起皱、桔皮、凹坑以及表面不平等缺陷,该方法对于内部缺陷无法检测,敲击检测方法是一种临时性与应急性检测方式,该方式针对内部缺陷的判定完全依靠于检验人员对敲击声音的熟悉程度与辨别能力。渗透检测法仅适用于检测试件表面贯穿裂纹与分层,该方法检测较为简便,但是渗透液对试件具有污染。x射线检测对于桨叶表面微裂纹、内部夹杂以及纤维断裂等缺陷具有较好的检测灵敏度,但是x射线检测方法对人体有害,同时该方法不适用于现场检测;超声检测可以实现内部缺陷检测,易于操作以及灵敏性及精确度高,能够实现缺陷位置、大小的检测,但该方法检测效率低,需采用耦合剂,同时对于具有复杂结构的试件而言,需要采用不同的超声探头;声发射检测方法可实现裂纹产生与扩展的远距离和连续图像检测,但是噪声信号干扰较大,缺陷产生信号与噪声信号区分较为困难。
5、以上几种常规检测方法对于旋翼桨叶复合材料检测均存在各自的检测局限性,随着科学技术的迅速发展,近年来,涌现出一大批用于复合材料检测的新方法与新技术。为了目前常规红外光热成像检测直升机旋翼桨叶冲击损伤造成多类型缺陷无法一次性检测以及检测问题,本发明涉及一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像方法与装置,该发明涉及调制热流诱导热波扩散机制、信号重构、多源信息融合及缺陷识别量化与表征等多方面内容,最终实现针对直升机旋翼桨叶冲击损伤多类型跨尺度损伤的较高分辨率检测。
技术实现思路
1、本发明提供一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置及其城乡方法,以解决目前常规红外光热成像检测直升机旋翼桨叶冲击损伤造成多类型缺陷无法一次性检测以及检测问题。
2、本发明通过以下技术方案实现:
3、一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置,所述红外光热成像装置包括装夹平台1、旋翼桨叶2、三轴移动平台45、b型usb数据线39、第一以太网线31、第二以太网线40、计算机41、运动控制线42、三轴运动控制器43和运动信号传输线44;
4、所述装夹平台1上安装旋翼桨叶2,所述装夹平台1上设置三轴移动平台45,所述三轴移动平台45通过b型usb数据线39、第一以太网线31和第二以太网线40与计算机41相连接,所述计算机41还依次通过运动控制线42、三轴运动控制器43和运动信号传输线44与三轴移动平台45相连接;
5、所述三轴移动平台45包括柱透镜3、第一工程漫射体4、一维移动模组5、第一套筒6、第一准直镜7、第一光纤8、第一tec半导体制冷器9、第一半导体激光器10、第一tec半导体制冷器电源线11、第一半导体激光器电源线12和第一半导体激光器电源15、第二tec半导体制冷器电源线13、第二半导体激光器电源线14、第二半导体激光器电源16、第二半导体激光器17、第二tec半导体制冷器18、第二光纤19、第二准直镜20、第二套筒21和第二工程漫射体22、第一光学相机23、焦平面红外热像仪24、第二光学相机25、激光十字光路33、探测激光器35、数据采集卡37、双目图像整合模块38和平移模组46;
6、所述柱透镜3与第一工程漫射体4相连接,所述第一工程漫射体4与第一套筒6相连接,所述第一套筒6上安装一维移动模组5,所述第一套筒6依次通过第一准直镜7、第一光纤8与第一半导体激光器10相连接,所述第一半导体激光器10通过第一半导体激光器电源线12与第一半导体激光器电源15相连接;
7、所述第一半导体激光器电源15还通过第一tec半导体制冷器电源线11与第一tec半导体制冷器9相连接;
8、所述第一半导体激光器电源15通过第二bnc数据线30与数据采集卡37相连接;
9、所述数据采集卡37通过第一bnc数据线29与第二半导体激光器电源16相连接;
10、所述第二半导体激光器电源16通过第二tec半导体制冷器电源线13与第二tec半导体制冷器18相连接;
11、所述第二半导体激光器电源16还通过第二半导体激光器电源线14与第二半导体激光器17相连接,所述第二半导体激光器17依次通过第二光纤19、第二准直镜20、第二套筒21和第二工程漫射体22相连接;
12、所述数据采集卡37通过b型usb数据线39与计算机41相连接;所述焦平面红外热像仪24通过脉冲触发信号线27和激励信号采集线28与数据采集卡37相连接;所述第一光学相机23和第二光学相机25分别通过第一camlink线26和第二camlink线32与双目图像整合模块38相连接,所述数据采集卡37还通过第三bnc数据线36与探测激光器35相连接,所述探测激光器35通过第三光纤34与激光十字光路33相连接,所述激光十字光路33上设置平移模组46。
13、一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像方法,所述红外光热成像方法利用如所述直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像系统,所述红外光热成像方法包括以下步骤,
14、步骤1:明确待检测旋翼桨叶2,将待检测旋翼桨叶2放置于装夹平台1上;
15、步骤2:开启直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置;
16、步骤3:调整三轴移动平台45,使第一光学相机23、焦平面红外热像仪24以及第二光学相机25对准旋翼桨叶2的起始端,同时采用将标准尺放到与旋翼桨叶2同一平面,对第一光学相机23及第二光学相机25成像分辨率进行标定;
17、步骤4:调整第一套筒6、第二套筒21以及激光十字光路33,使其对准待检测旋翼桨叶2的起始区域,明确固定位置下焦平面红外热像仪24所检测面积及三维尺寸;
18、步骤5:计算机41按照信号y(t)进行数字输出;
19、步骤6:计算机41通过控制数据采集卡37,使第一光学相机23、焦平面红外热像仪24、第二光学相机25、第一半导体激光器电源15、第二半导体激光器电源16、探测激光器35同步工作;
20、步骤7:当第一光学相机23、焦平面红外热像仪24以及第二光学相机25完成对所在位置成像检测后,控制三轴移动平台45,移动到下一个位置重复步骤6,最终实现对整个旋翼桨叶2的光学形貌测量以及红外光热成像检测,通过融合算法以及图像拼接实现对整个旋翼桨叶2的融合检测;
21、步骤8:获取的图像序列红外图像序列xt;
22、步骤9:关闭直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像装置,此过程包括系统涉及所有用电器的关闭。
23、进一步的,所述步骤5中信号y(t)为正弦载波的多级编码信号,具体为,
24、
25、式中t0为载波周期,ω0为载波初始角频率,n为码长,kj为每个码元的值。
26、进一步的,计算机41编码的数字信号经数据采集卡37改变为模拟信号,数据采集卡37产生的模拟信号控制第二半导体激光器电源16,进而使第二半导体激光器17按照给定模拟信号调制规律变化;此时计算机41同样产生一个直流信号,该直流信号经数据采集卡37变为模拟信号后通过控制15,对第一半导体激光器10进行给定信号输出;此时计算机41通过数据采集卡37控制探测激光器35,进而使激光十字光路33工作。
27、进一步的,所述步骤8考虑到判定两个序列xt和yt之间的领先或滞后关系问题,如果二者满足该公式定义的形式:
28、yt=axt-k+ωt
29、那么如果k大于0,认定序列xt领先yt k阶,如果k小于0,则滞后k阶;
30、假设噪声wt同序列xt无线性相关性,互相关协方差公式可以由下式计算得到:
31、γyx(h)=cov(yt+h,xt)=(yt+h,xt)=cov(axt+h-k+ωt+h,xt)=(axt+h-k+ωt+h,xt)=cov(axt+h-k,xt)=(axt+h-k,xt)=aγx(h-k)(h-k)
32、进而获取皮尔森相关系数如下,
33、
34、ρxy(k)=ρxy(-k)
35、通过计算激励信号及指定阶数范围的互相关系数,取其中最大值作为峰值特征,对应的阶数即为延时特征;
36、
37、本发明的有益效果是:
38、本发明公开了一种直升机旋翼桨叶冲击损伤复合光激励皮尔森相关红外光热成像方法,提出基于热流动态扩散时频特征的皮尔森相关红外光热成像方法,该方法通过对试件采用线/面复合光激励融合皮尔森相关方法与双目三维形貌测量等多项技术,最终可实现针对直升机旋翼桨叶冲击损伤表面/浅表层高分辨成像检测。
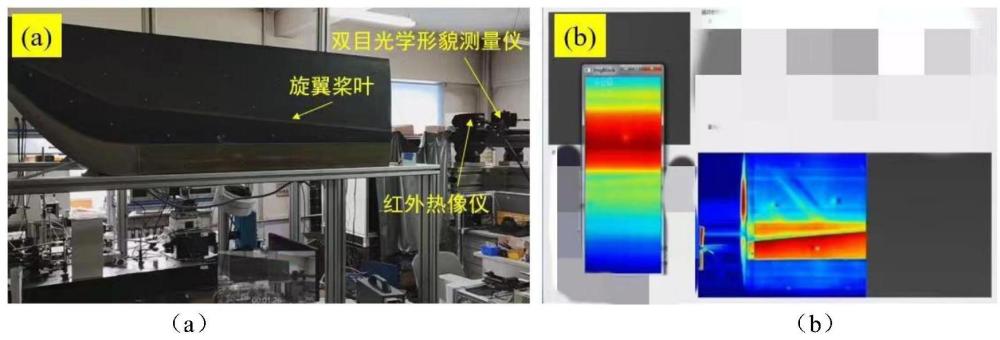
39、本发明采用鲍威尔透镜整形光束为线型光源,利用多个函数发生器分别控制线/面热源,同时利用双目光学形貌测量仪获取材料表面高精度形貌,采用分块检测与图像拼接技术实现大尺度旋翼桨叶多类型跨尺度缺陷/损伤的一次性检测。该装置最终可以实现针对旋翼桨叶分辨率优于0.2μm的高分辨成像,识别冲击损伤表面裂纹宽度大于10μm,可检测深度小于4mm,径深比优于1.2的内部分层脱粘缺陷。
40、本发明适用于航空航天复合材料层板、蜂窝夹层结构等覆层复合材料缺陷/损伤检测。
- 还没有人留言评论。精彩留言会获得点赞!