一种雷达目标探驱跟踪处理方法及处理装置与流程
本发明属于雷达信号处理,具体涉及一种雷达目标探驱跟踪处理方法及处理装置。
背景技术:
1、作为低慢的小目标,鸟类跟踪和无人机在生态监测、军事侦察、航空安全等领域具有重要的应用价值。鸟类的迁徙研究和保护对于了解生物多样性、环境变化以及气候演变至关重要。无人机技术的迅速发展使其成为军事、民用和商业领域的重要工具。在军事领域,无人机的目标跟踪是情报获取和目标定位的关键任务。在民用和商业领域,无人机的智能化和自主飞行能力对于实现安全、高效的航空交通管理至关重要。
2、现有低慢的小目标跟踪方法通常使用雷达设备发射无线电波,并接收目标物体反射回来的信号;通过对接收信号进行处理和分析,可以实现目标物体的定位和跟踪。通常采用以下步骤:发射无线电波:系统通过雷达设备发射无线电波,这些波会与目标物体相互作用;接收反射信号:雷达设备接收目标物体反射回来的信号,并将其转化为电信号;信号处理:通过信号处理算法对接收到的信号进行处理和分析,这些算法可以提取信号中的特征,如时间延迟、频率变化等,以获取目标物体的相关信息;目标定位和跟踪:基于信号处理结果,系统可以确定目标物体的位置和运动轨迹,利用目标物体在不同时间点的位置信息,可以实现目标的跟踪和预测;数据显示和分析:跟踪结果可以通过用户界面或其他显示设备展示出来,以供操作人员进行分析和决策。
3、然而,特别是在涉及到目标跟踪和定位的复杂场景时,数据显示和分析存在以下缺点:1)信息丢失:二维平面的显示无法完整展示目标的三维位置和运动信息,这可能导致部分信息的丢失,特别是在需要考虑目标的高度或深度方面时。2)视角限制:二维平面显示可能无法提供多个视角和观察角度,限制了对目标的全面观察和分析;在需要进行立体感知、姿态分析或目标遮挡检测时,二维平面显示可能无法提供足够的信息。3)空间关系表达困难:二维平面无法很好地表达目标之间的空间关系和相对位置;在涉及多个目标之间的互动、碰撞避免或群体行为分析时,这种限制可能导致对目标之间关系的理解不准确或不完整。4)数据超载:在复杂场景下,二维平面可能无法有效显示所有目标的相关信息,尤其当目标数量众多、运动快速或密集时,这可能导致信息过载和困惑,使分析人员难以从中获取有用的洞察。
4、因此,现有低慢的小目标跟踪方法难以实现对大规模鸟类种群的高精度跟踪,以及在复杂环境条件下的目标定位和跟踪;也无法保证在复杂的战场环境中,无人机目标跟踪的稳定性、准确性和实时性。如何在不同环境条件下的复杂场景下有效地跟踪低慢的小目标的运动轨迹,并提供精确的位置和速度信息成为目前亟待解决的问题。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种雷达目标探驱跟踪处理方法及处理装置。本发明要解决的技术问题通过以下技术方案实现:
2、本发明实施例提供了一种雷达目标探驱跟踪处理方法,包括步骤:
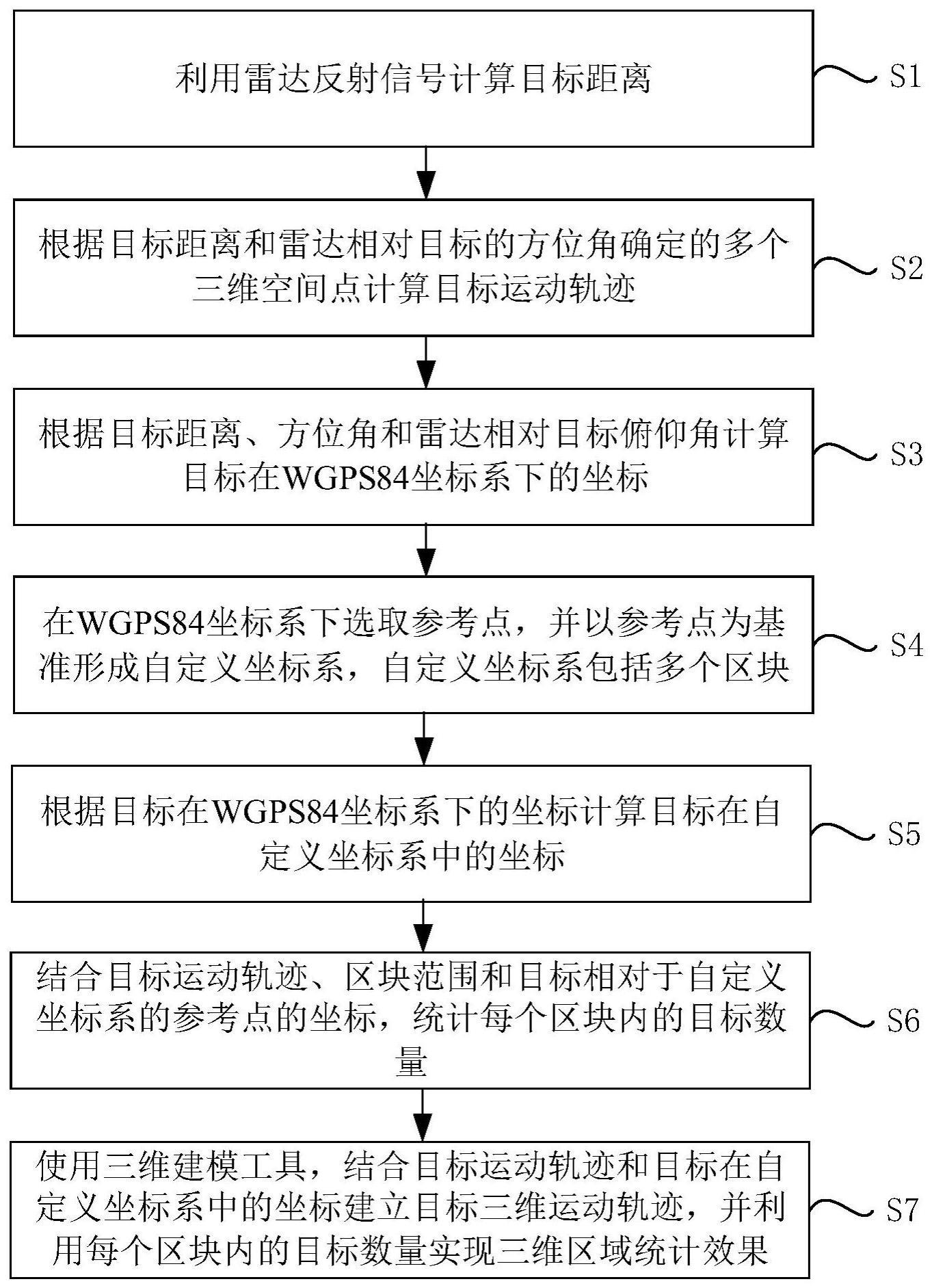
3、利用雷达反射信号计算目标距离;
4、根据所述目标距离和雷达相对目标的方位角确定的多个三维空间点计算目标运动轨迹;
5、根据所述目标距离、所述方位角和雷达相对目标俯仰角计算目标在wgps84坐标系下的坐标;
6、在所述wgps84坐标系下选取参考点,并以所述参考点为基准形成自定义坐标系,其中,所述自定义坐标系包括多个区块;
7、根据所述目标在wgps84坐标系下的坐标计算目标在所述自定义坐标系中的坐标;
8、结合所述目标运动轨迹、区块范围和目标相对于所述自定义坐标系的参考点的坐标,统计每个区块内的目标数量;
9、使用三维建模工具,结合所述目标运动轨迹和目标在所述自定义坐标系中的坐标建立目标三维运动轨迹,并利用所述每个区块内的目标数量实现三维区域统计效果。
10、在本发明的一个实施例中,利用雷达反射信号计算目标距离,包括:
11、将所述雷达反射信号转换为数字信号,并对所述数字信号进行去噪处理,得到预处理信号;
12、根据所述预处理信号和雷达的多普勒频率计算目标速度;
13、根据所述目标速度和多普勒频移计算所述目标距离。
14、在本发明的一个实施例中,根据所述目标距离和雷达相对目标的方位角确定的多个三维空间点,计算目标运动轨迹,包括:
15、根据所述目标距离和雷达相对目标的方位角确定的多个三维空间点,使用dbscan密度聚类算法计算所述目标运动轨迹。
16、在本发明的一个实施例中,根据所述目标距离、所述方位角和雷达相对目标俯仰角计算目标在wgps84坐标系下的坐标,包括:
17、利用所述目标距离、所述方位角和雷达相对目标俯仰角计算目标在雷达坐标系下的坐标:
18、x1=r*cos(θ)*cos(φ);
19、y1=r*cos(θ)*sin(φ);
20、z1=r*sin(θ);
21、其中,r为目标距离,θ为雷达相对目标的俯仰角,φ为雷达相对目标的方位角;
22、将所述目标在雷达坐标系下的坐标转换为目标在三维坐标系下的坐标:
23、x=rx*x1+ry*y1+rz*z1;
24、y=ux*x1+uy*y1+uz*z1;
25、z=vx*x1+vy*y1+vz*z1;
26、其中,rx、ry、rz、ux、uy、uz、vx、vy、vz为雷达相对地球旋转时旋转矩阵中的元素,(x1,y1,z1)为目标在雷达坐标系下的坐标;
27、根据地球椭球体模型,将所述目标在三维坐标系下的坐标转换为目标在火星坐标系下的经纬度:
28、λ=atan2(y,x);
29、φ=atan2(z,sqrt(x^2+y^2));
30、h=sqrt(x^2+y^2+z^2)-n;
31、其中,λ为经度,φ为纬度,h为高度,n为椭球体上该点处的曲率半径,(x,y,z)为目标在火星坐标系下的坐标;
32、采用gcj02_to_wgs84函数,将所述目标在火星坐标系下的经纬度转换为目标在wgps84坐标系下的坐标。
33、在本发明的一个实施例中,在所述wgps84坐标系下选取参考点,并以所述参考点为基准形成自定义坐标系,包括:
34、在所述wgps84坐标系下定义参考点,并以所述参考点为中心、以目标半径形成圆,在圆的外切四边形范围内设置若干四边形子区域,使得若干四边形子区域的长度均相同、宽度均相同;
35、使用等差数列计算每个四边形子区域的中心点坐标:
36、center_x2=(lw/2)+i*lw;
37、center_y2=(lh/2)+j*lh;
38、其中,(x2,y2)为第i个四边形子区域的中心点坐标,lw为四边形子区域的长度,lh为四边形子区域的宽度,i为行的遍历项,j为列的遍历项;
39、计算每个四边形子区域的横坐标范围和纵坐标范围,得到每个四边形子区域的范围:
40、xgt=i*lw;
41、xlt=(i+1)*lw;
42、ygt=j*lh;
43、ylt=(j+1)*lh。
44、其中,xgt为第i个区块的最小横坐标,xlt为第i个区块的最大横坐标,ygt为第i个区块的最小纵坐标,ylt为第i个区块的最大纵坐标;
45、根据每个四边形子区域的中心点坐标和每个四边形子区域的范围确定所述多个区块,形成自定义坐标系。
46、在本发明的一个实施例中,根据所述目标在wgps84坐标系下的坐标计算目标在所述自定义坐标系中的坐标,包括:
47、通过geodesic.wgs84.inverse函数,利用所述目标在wgps84坐标系下的坐标计算目标与所述参考点之间的相对距离和相对方位角;
48、根据所述相对距离和模型比例尺计算目标在所述自定义坐标系中的实际距离:
49、distance=geodirect.s12*self.model_ratio/100.0
50、其中,distance为实际距离,geodirect.s12为目标与所述参考点之间的相对距离,self.model_ratio为模型比例尺,self.model_ratio表示实际距离与模型距离之间的比例关系;
51、根据所述相对方位角和坐标系转换公式计算目标在所述自定义坐标系中的实际方位角:
52、azimuth=(geodirect.azi1-90)*math.pi/180.0
53、其中,azimuth为实际方位角,geodirect.azi1为目标与所述参考点之间的相对方位角;
54、根据所述实际距离和所述实际方位角计算目标在所述自定义坐标系中的水平距离和垂直距离,并将所述目标在wgps84坐标系下的高度作为目标在所述自定义坐标系中的高度,得到目标在所述自定义坐标系中的坐标:
55、x3=distance*math.cos(azimuth);
56、z3=distance*math.sin(azimuth);
57、y3=h=sqrt(x^2+y^2+z^2)-n;
58、其中,(x3,y3,z3)为目标在自定义坐标系中的坐标,x3表示目标点在自定义坐标系下的水平距离,z3表示目标点在自定义坐标系下的垂直距离。
59、在本发明的一个实施例中,结合所述目标运动轨迹、区块范围和目标相对于所述自定义坐标系的参考点的坐标,统计每个区块内的目标数量,包括:
60、通过geodesic.wgs84.inverse函数,利用所述目标在wgps84坐标系下的坐标计算目标与所述参考点之间的相对距离和相对方位角;
61、利用所述相对距离和所述相对方位角计算目标相对于所述自定义坐标系的参考点的坐标:
62、x4=r*math.cos(bearing);
63、y4=r*math.sin(bearing);
64、其中,(x4,y4)为目标相对于参考点的坐标,r为相对距离,bearing为相对方位角;
65、根据目标相对于参考点的坐标在所述自定义坐标系中平移目标点,得到移动后的目标坐标:
66、x5=center_x2+(x4);
67、y5=center_y2+(y4);
68、其中,(x5,y5)为移动后的目标坐标,(center_x2,center_y2)为参考点坐标,(x4,y4)为目标相对于参考点的坐标;
69、利用移动后的目标坐标,结合所述目标运动轨迹和所述区块范围统计每个区块内的目标数量:
70、mapx=int(math.floor(x5/lw));
71、mapy=int(math.floor(y5/lh))。
72、在本发明的一个实施例中,使用三维建模工具,结合所述目标运动轨迹和目标在所述自定义坐标系中的坐标建立目标三维运动轨迹,并利用所述每个区块内的目标数量实现三维区域统计效果,包括:
73、使用visualization toolkit三维建模工具,结合所述目标运动轨迹和目标在所述自定义坐标系中的坐标建立目标三维运动轨迹,并利用所述每个区块内的目标数量实现在visualization toolkit中三维区域中目标数量的统计,根据每个三维区域中目标数量将三维区域标记为不同颜色;
74、使用pyqt5构建用户界面,实现三维数据的可视化。
75、本发明的另一实施例提供了一种雷达目标探驱跟踪处理装置,包括:
76、目标距离计算模块,用于利用雷达反射信号计算目标距离;
77、运动轨迹计算模块,用于根据所述目标距离和雷达相对目标的方位角确定的多个三维空间点计算目标运动轨迹;
78、经纬度换算模块,用于根据所述目标距离、所述方位角和雷达相对目标俯仰角计算目标在wgps84坐标系下的坐标;
79、参考点选取模块,在所述wgps84坐标系下选取参考点,并以所述参考点为基准形成自定义坐标系,其中,所述自定义坐标系包括多个区块;
80、坐标系换算模块,用于根据所述目标在wgps84坐标系下的坐标计算目标在所述自定义坐标系中的坐标;
81、目标数量统计模块,用于结合所述目标运动轨迹、区块范围和目标相对于所述自定义坐标系的参考点的坐标,统计每个区块内的目标数量;
82、三维建模模块,用于使用三维建模工具,结合所述目标运动轨迹和目标在所述自定义坐标系中的坐标建立目标三维运动轨迹,并利用所述每个区块内的目标数量实现三维区域统计效果。
83、与现有技术相比,本发明的有益效果:
84、本发明的跟踪处理方法充分利用多个雷达的方位数据信息,通过计算目标在wgps84坐标系下的坐标,建立具有多个区块的自定义坐标系,并且在wgps84坐标系与自定义坐标系之间进行目标的坐标换算,实现了每个区块内目标数量的统计,从而进行三维建模时可以使用三维空间来描述雷达的目标,实现三维视角效果的定位,完整展示了目标的三维位置和运动信息,更直观地表达目标之间的空间关系,使得用户可以从不同的视角和观察角度来观察目标,并且可以提供更丰富的展示效果,比传统二维具有更多的方位信息,克服了在二维视角下缺少高度的价值,大大提高了雷达实用价值。
- 还没有人留言评论。精彩留言会获得点赞!