一种测量转弯通道最大宽度的测量装置的制作方法
本发明属于整车试验研究领域,具体而言,涉及一种测量转弯通道最大宽度的测量装置。
背景技术:
1、车辆通过性试验用以验证车辆通过各种坏路及无路地带和克服各种障碍的能力,其中车辆弯道通过性测试是通过测量车辆按规定路线转弯时的转弯通道最大宽度,来验证车辆能否通过弯道路段。在qc/t912-2013中规定了车辆弯道通过性试验要求:1.试验道路应为平坦、干燥、整洁、无障碍的铺装路面,轮胎和路面的接触表面的摩擦系数应不大于0.80。2.试验规定的路线由三部分组成:直线驶入路段、半径为12.5m的90°圆弧路段以及直线驶出路段,两直线路段分别与圆弧路段的交点处与圆弧相切。3.记录外侧车身在底面的垂直投影作为测量后摆值得基准线,实验车辆车速应不超过5km/h,在驶入、转弯和驶出过程中应保证车辆前外侧转向车轮轮胎在地面得参考点与规定路线一致、且轨迹偏差不应超过50mm。
2、现有的转弯通道最大宽度的测量通常采用滴水法,在车辆的左侧前端安装标记杆,在车辆的右侧后轴(组)中心安装滴水杆,车速由车辆上的道路仪监测,标记杆始终与车辆左侧的最大宽度处平行,并尽可能保证标记杆与行驶轨迹重合,人工操作在车辆右侧的滴水杆加水,滴水杆总的水落下并形成滴水轨迹,待车辆完全驶出场地之后,用卷尺测量圆弧中点到滴水轨迹之间的距离,即所测得的转弯通道最大宽度。滴水法存在以下问题:1.在试验过程中,驾驶员需要边控制车速边监测标记杆是否与道路轨迹重合,对驾驶员的操作水平要求极高,才能有效保证在驶入、转弯和驶出过程中应保证车辆前外侧转向车轮轮胎在地面得参考点与规定路线一致、且轨迹偏差不应超过50mm,若出现偏差则需要多次测试,造成驾驶员操作疲惫,同时整个过程驾驶员头部需要伸出驾驶室,具有一定的风险。2.试验需要多人配合,滴水杆处需要有试验人员负责添加液体,测量时需要有试验人员固定卷尺原点,还需要一个试验人员进行动态测量。3.受外界环境影响,在酷暑夏季,滴水形成的轨迹容易挥发,需要多次测量;在冬季受风速影响,水滴轨迹相比理论偏差更大,影响测量精度,导致最终的测量结果精确度低。
技术实现思路
1、本发明针对现有技术缺陷,提出一种新型的测量转弯通道最大宽度的测量装置,能够精准控制试验车辆在驶入、转弯和驶出过程中,其前外侧转向车轮的车轮轨迹与试验道路外环线的偏差小于50mm,整个过程驾驶员头部无需伸出驾驶室,确保试验过程的安全。
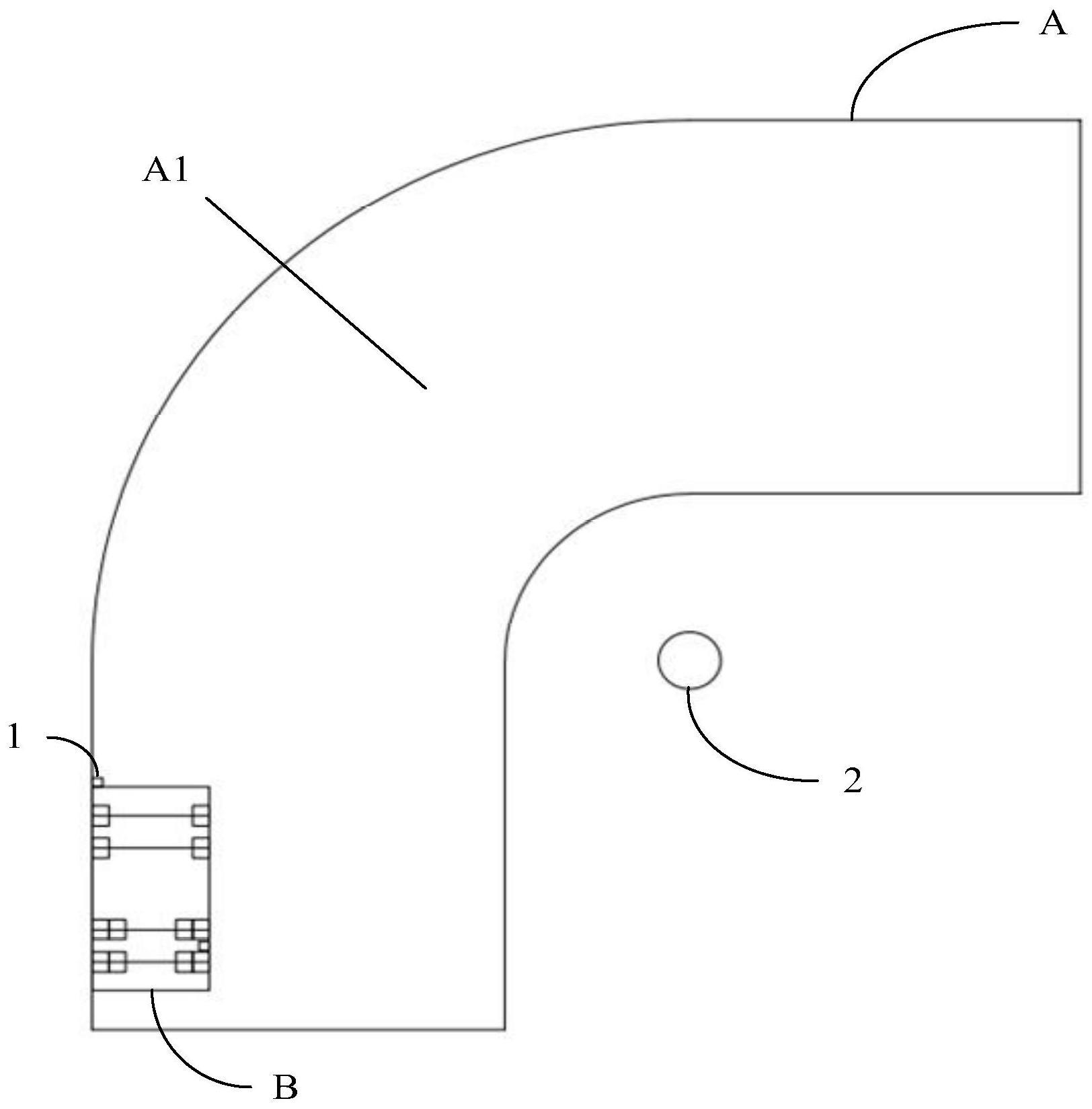
2、为达到上述目的,本发明采用的技术方案提供了一种测量转弯通道最大宽度的测量装置,所述测量装置布置在试验场地中,试验场地包括试验车辆和试验道路,试验道路为直线驶入路段、半径为12.5m的90°圆弧路段以及直线驶出路段,两直线路段分别与圆弧路段的交点处与圆弧相切,所述测量装置包括功能杆组件、激光雷达组件和显示面板;
3、所述功能杆组件包括第一功能杆和第二功能杆;当试验车辆沿试验道路顺时针行驶时,所述第一功能杆固定在试验车辆的左侧前端,所述第二功能杆固定在试验车辆右侧的后轴或者后轴组中心处;当试验车辆沿试验道路逆时针行驶时,所述第一功能杆固定在试验车辆的右侧前端,所述第二功能杆固定在试验车辆左侧的后轴或者后轴组中心处;
4、所述第一功能杆的底部安装有激光摄像头,所述第二功能杆的底部安装有激光雷达;所述激光雷达组件安装在试验道路的圆弧路段的圆心位置;所述显示面板位于试验车辆的驾驶室内、且与所述第一功能杆和所述第二功能杆通信连接。
5、进一步地,所述激光雷达组件用于测量激光出射点距离试验道路的圆弧路段的圆心的垂直高度信息并发送至所述第二功能杆。
6、进一步地,所述第一功能杆和所述第二功能杆的底部距离地面均具有预定高度;所述第一功能杆用于采集车轮沿试验道路的外环线的行驶轨迹信息并反馈至所述显示面板;所述第二功能杆用于采集距离地面的高度和接收激光雷达组件发射的信号并反馈至所述显示面板。
7、进一步地,所述测量装置测量的转弯通道最大宽度d的公式如下:
8、d=12.5-hmin
9、
10、式中:hmin为激光雷达组件的出射点到第二功能杆激光线的投影距离,s为激光雷达组件到第二功能杆的激光雷达的测量距离,h1为激光雷达组件的出射点到试验道路的圆弧路段圆心的垂直距离,h2为第二功能杆的激光雷达的出射点到试验道路的地面的垂直距离;
11、进一步地,道路试验时,所述第二功能杆和所述激光雷达组件基于采集频率记录多组s、h2、h1的值,根据公式计算激光雷达组件的出射点到第二功能杆激光线的投影距离,基于激光雷达组件的出射点到第二功能杆激光线的投影的最小距离,计算所述测量装置测量的转弯通道最大宽度d。
12、进一步地,所述第一功能杆的激光摄像头射出的激光束垂直于车轮胎面中心沿线上,所述第二功能杆的激光雷达垂直于地面射出的激光束位于试验车辆的右侧两个后轮的轴距中心、且位于右侧车轮行驶轨迹的外侧边线上。
13、进一步地,所述显示面板包括gps和控制器,所述gps和所述控制器位于显示面板内部;所述gps基于实时采集试验车辆的车速通过显示面板显示在显示面板的屏幕上;所述控制器基于接收来自第一功能杆和第二功能杆的信息,分析处理并显示在显示面板的屏幕上。
14、进一步地,道路试验时,所述第一功能杆的激光摄像头射出的激光束垂直于车轮胎面中心线上,并将采集的图像信息反馈至所述显示面板,驾驶员通过观察显示面板,控制激光束落在具有设计宽度的试验道路外环线内。
15、进一步地,所述第一功能杆和所述第二功能杆均包括杆身和基座,所述第一功能杆和所述第二功能杆的杆身分别与各自的基座连接、且垂直于地面,所述第一功能杆和所述第二功能杆的基座分别与试验车辆固定牢固。
16、本发明的有益效果是:
17、第一、本发明的功能杆组件第一功能杆和第二功能杆,根据试验车辆行驶方向,第一功能杆固定在试验车辆的左侧或右侧的前端,即位于试验道路外环线的正上方,第二功能杆固定在试验车辆的两个后轮的轴距中心位置、且与第一功能杆呈对角线方向,第一功能杆的底部安装有激光摄像头,第二功能杆的底部安装有激光雷达,激光雷达组件安装在试验道路的圆弧路段的圆心位置,通过激光雷达组件能够将信号发射至第二功能杆上,道路试验时,试验车辆的轮胎行驶在试验道路外环线上,车轮胎面滚动覆盖试验道路外环线形成车轮轨迹,通过第一功能杆激光摄像头射出的激光束垂直于车轮胎面中心线上,并将采集的图像信息反馈至显示面板,驾驶员在驾驶室内通过观察显示面板,控制激光束落在具有一定宽度的试验道路外环线内,能够精准控制试验车辆在驶入、转弯和驶出过程中,其前外侧转向车轮的车轮轨迹与试验道路外环线的偏差小于50mm,整个过程驾驶员头部无需伸出驾驶室,确保试验过程的安全;
18、第二、在优选实现方式中,本发明的激光雷达组件能够向第二功能杆的激光雷达发送信号进行距离测量,能够实现精准测量,解决了现有采用滴水测量受外界环境影响,夏季滴水易挥发问题以及风速导致水滴轨迹相比理论偏差大的问题;
19、第三、在优选实现方式中,本发明的转弯通道最大宽度计算公式根据空间坐标和勾股定理得到,d=12.5-hmin,hmin为激光雷达组件的出射点到第二功能杆激光线的投影距离,,s为激光雷达组件与第二功能杆的激光雷达的测量距离,h1为第二激光雷达的出射点到试验道路的圆弧路段圆心的垂直距离,h2为第一激光雷达的出射点到试验道路的地面的垂直距离,该计算方法简单,精准度高;
20、第四、在优选实现方式中,本发明的第一功能杆采用伸缩杆,第一功能杆的伸缩结构能够调节离地高度能够保证激光摄像头的视觉范围覆盖地面的场地轨迹,以使激光探射射出的光线在显示面板中呈现。
- 还没有人留言评论。精彩留言会获得点赞!