一种基于深度主动学习的雷达目标识别方法及雷达系统与流程
本发明涉及雷达数据识别,尤其涉及一种基于深度主动学习的雷达目标识别方法及雷达系统。
背景技术:
1、随着人工智能技术的发展,基于ai技术的下一代军事雷达系统已然成为未来军事监测和拦截领域的重要趋势。这种新型雷达系统在探测、识别和拦截方面具有更高的精度和更强的实时性。
2、通过使用机器学习和深度学习等技术,这种雷达系统可以根据不同的场景和目标,自动调整探测参数,提高探测精度和速度。但目前基于机器学习或深度学习的雷达目标识别方案,存在以下问题:模型无法训练所有背景下的数据(例如不同环境、不同雷达、不同目标类型等),模型仅能识别固定类别的物体,模型无法识别特征差异很大的数据,模型一旦部署无法在线利用新数据。现有的雷达目标识别方案,大都无法针对新数据持续更新模型,少量方案考虑到了模型的可持续更新,但也只是使用普通的微调方法。考虑到新数据可能是训练集中已有的类型,也可能是训练集中未出现过的新类型,如果只采用简单的微调法更新分类模型参数,会导致会灾难性遗忘问题。此外,基于实测数据训练的雷达数据识别模型,其训练阶段获取的不同类别样本数量可能相差非常大,这也会影响模型的分类效果。
技术实现思路
1、本发明提供了一种基于深度主动学习的雷达目标识别方法及雷达系统,本发明的目的在于研究基于ai技术的雷达目标识别方案,实现识别模型的可持续更新,并克服现有技术中存在的不足,解决类别极度不平衡分类问题和增量学习的灾难性遗忘问题。
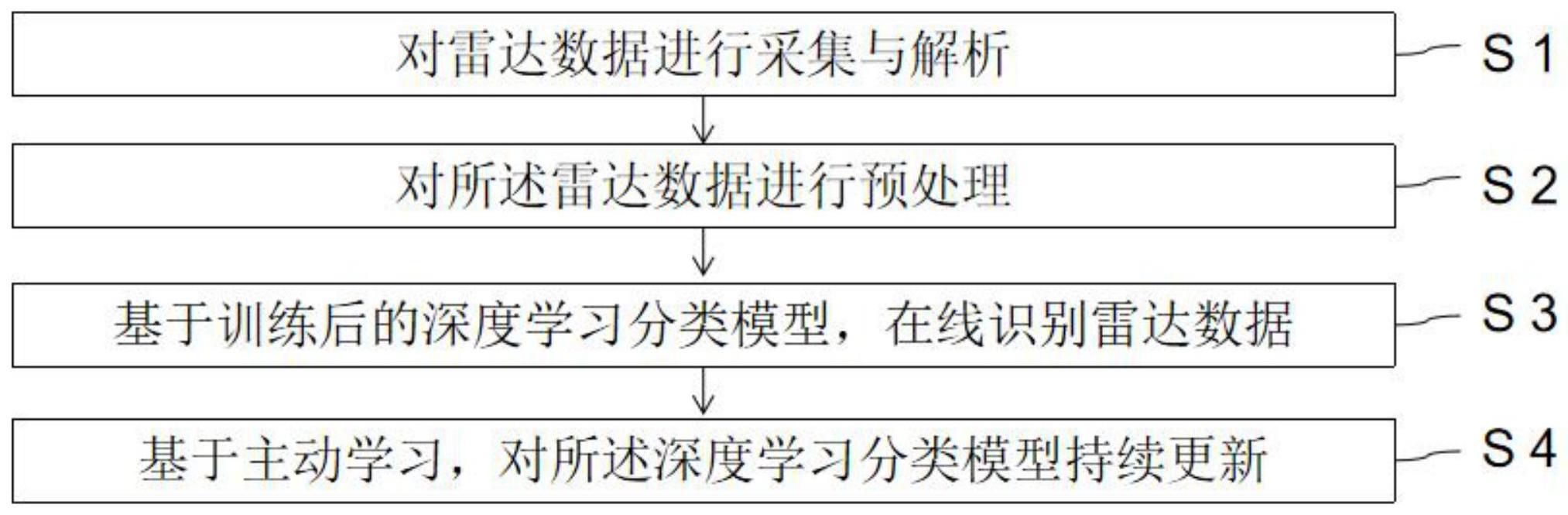
2、本发明采用的技术方案是:提供一种基于深度主动学习的雷达目标识别方法,包括如下步骤:
3、步骤1、对雷达数据进行采集与解析;
4、步骤2、对所述雷达数据进行预处理;
5、步骤3、基于训练后的深度学习分类模型,在线识别雷达数据;
6、步骤4、基于主动学习,对所述深度学习分类模型持续更新。
7、进一步的,步骤1中,对雷达数据进行采集的方法包括:雷达系统基于现场实测,采集相关点迹数据,并做实时航迹关联,得到原始航迹数据;
8、对雷达数据进行解析的方法包括:雷达系统通过udp协议向固定ip地址和端口发送原始航迹数据,目标识别系统实时监听该地址并及时捕捉到报文数据;对于每一条接收到的报文数据,解析提取所需特征;然后根据批号归为一组形成航迹数据,按照报文里的时间进行排序,得到以批号为索引的航迹数据序列。
9、进一步的,步骤2中,对所述雷达数据进行预处理的方法包括:数据清洗、坐标转换、数据差分、数据分帧;
10、所述数据清洗包括缺失值处理和异常值处理;
11、所述坐标转换是将航迹数据的雷达坐标转换为以雷达所在位置为原点的笛卡尔坐标系三维坐标;
12、所述数据差分是对航迹数据的坐标做差分处理,即当前点的坐标减去上一个点的坐标;
13、所述数据分帧是在输入的序列数据上做滑窗处理,扩充样本数量。
14、进一步的,步骤3中,针对所述深度学习分类模型,从数据层面和/或基于损失函数来缓解类别不平衡带来的影响;所述数据层面是通过过采样和欠采样对雷达数据进行处理;所述损失函数是采用focal loss或ghm loss对模型进行优化。
15、进一步的,步骤4中,主动学习的方法包括:在线识别过程中,不断积累保存新样本和人工标注结果,然后通过类增量学习算法不断更新深度学习分类模型,并将更新后的模型继续用于雷达数据在线识别。
16、进一步的,所述通过类增量学习算法不断更新深度学习分类模型的方法包括:
17、保存历史数据中的最优参考样本,根据类别的不同将其分为多个最优参考样本集;
18、当出现新样本,基于参考样本集的平均特征向量对其类别进行判断;
19、每当深度学习分类模型获取到一定批量的新样本时,就更新其特征提取模型和参考样本集。
20、进一步的,所述保存历史数据中的最优参考样本,根据类别的不同将其分为多个最优参考样本集的方法包括:
21、设置k为可存储的参考样本总数,t为目前为止已经观察到的类别总数,则每个类可选择m=k/t个参考样本;每当模型遇到新的类别时,就调整各类参考样本集数量,以保证平均分配。
22、进一步的,所述当出现新样本,基于参考样本集的平均特征向量对其类别进行判断的方法包括:
23、分别计算每个类别的m个参考样本的平均特征向量μ1,…,μt;如果要预测一个新样本x的标签y*,计算该样本的特征向量,与其最接近的平均特征向量μy所代表的类别即为该样本的预测标签,公式如下所示:
24、
25、
26、其中,py表示类别y的所有参考样本,表示分类模型的特征提取部分。
27、进一步的,所述每当深度学习分类模型获取到一定批量的新样本时,就更新其特征提取模型和参考样本集的方法包括:
28、构造一个增强训练集,该训练集由所有新样本和存储的历史参考样本组成;
29、针对每个训练样本对当前的网络进行评估,并存储之前所有类别的网络输出结果;
30、通过最小化一个损失函数来更新网络参数,该损失函数包括分类损失和蒸馏损失两部分,分类损失针对于新类别数据,蒸馏损失则针对于旧类别数据,损失函数如下所示:
31、
32、其中,y=s,…,t表示新增类别,y=1,…,s-1表示原有类别,函数第一项表示分类损失,为普通的交叉熵损失,函数第二项表示蒸馏损失,φ表示分类模型的输出,表示上一次存储的所有旧类别的网络输出结果。
33、本发明还提供一种雷达系统,包括目标识别系统,所述目标识别系统通过如上所述的基于深度主动学习的雷达目标识别方法进行目标识别。
34、本发明的有益效果是:
35、(1)本发明基于深度学习,实现了雷达多类目标的在线识别分类。基于主动学习,实现了识别模型的可持续更新。
36、(2)本发明解决了类别极度不平衡导致的分类难问题。
37、(3)本发明解决了模型更新中的灾难性遗忘问题,可针对新数据新类别持续更新模型。
38、(4)本发明的方法适用范围广,泛化能力强,运算量少,成本更低,且识别准确率更高。
技术特征:
1.一种基于深度主动学习的雷达目标识别方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于深度主动学习的雷达目标识别方法,其特征在于,步骤1中,对雷达数据进行采集的方法包括:雷达系统基于现场实测,采集相关点迹数据,并做实时航迹关联,得到原始航迹数据;
3.根据权利要求1所述的基于深度主动学习的雷达目标识别方法,其特征在于,步骤2中,对所述雷达数据进行预处理的方法包括:数据清洗、坐标转换、数据差分、数据分帧;
4.根据权利要求1所述的基于深度主动学习的雷达目标识别方法,其特征在于,步骤3中,针对所述深度学习分类模型,从数据层面和/或基于损失函数来缓解类别不平衡带来的影响;所述数据层面是通过过采样和欠采样对雷达数据进行处理;所述损失函数是采用focal loss或ghm loss对模型进行优化。
5.根据权利要求1所述的基于深度主动学习的雷达目标识别方法,其特征在于,步骤4中,主动学习的方法包括:在线识别过程中,不断积累保存新样本和人工标注结果,然后通过类增量学习算法不断更新深度学习分类模型,并将更新后的模型继续用于雷达数据在线识别。
6.根据权利要求5所述的基于深度主动学习的雷达目标识别方法,其特征在于,所述通过类增量学习算法不断更新深度学习分类模型的方法包括:
7.根据权利要求6所述的基于深度主动学习的雷达目标识别方法,其特征在于,所述保存历史数据中的最优参考样本,根据类别的不同将其分为多个最优参考样本集的方法包括:
8.根据权利要求7所述的基于深度主动学习的雷达目标识别方法,其特征在于,所述当出现新样本,基于参考样本集的平均特征向量对其类别进行判断的方法包括:
9.根据权利要求8所述的基于深度主动学习的雷达目标识别方法,其特征在于,所述每当深度学习分类模型获取到一定批量的新样本时,就更新其特征提取模型和参考样本集的方法包括:
10.一种雷达系统,包括目标识别系统,其特征在于,所述目标识别系统通过权利要求1-9中任意一项所述的基于深度主动学习的雷达目标识别方法进行目标识别。
技术总结
本发明公开了一种基于深度主动学习的雷达目标识别方法及雷达系统,方法包括步骤1、对雷达数据进行采集与解析;步骤2、对所述雷达数据进行预处理;步骤3、基于训练后的深度学习分类模型,在线识别雷达数据;步骤4、基于主动学习,对所述深度学习分类模型持续更新。本发明基于深度学习,实现了雷达多类目标的在线识别分类。基于主动学习,实现了识别模型的可持续更新。本发明解决了类别极度不平衡导致的分类难问题。解决了模型更新中的灾难性遗忘问题,可针对新数据新类别持续更新模型。该方法适用范围广,泛化能力强,运算量少,成本更低,且识别准确率更高。
技术研发人员:郑敏娥,胡亮,陶原野,展华益
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!