一种土木工程内部空间轮廓扫描测绘方法及装置与流程
本发明涉及工程测量,具体涉及了一种用于土木工程内部空间轮廓的扫描测绘方法及装置。
背景技术:
1、建筑、隧道等土木工程的内部空间轮廓测绘,是校验施工质量及获取真实模型的基础手段,如建筑空间尺寸复验、隧道断面超欠挖比对等等。随着测量需求日益增加,特别是在数字建造、数字运维的大潮下,高效、精准的测量显得尤为重要。
2、目前,对于土木工程的内部空间轮廓测量,大多是通过传统的人工测距、量角、定位等方法来绘制土木工程的内部空间轮廓,但是通过传统人工测量的方式,需要多次测量以减少误差,导致测量工作耗费人工成本、时间成本高。
3、近年来,激光扫描技术为土木工程的空间测绘提供了新方法,如再古建筑保护、装修量测、隧道工程等的数字模型创建方面,已经得到一些应用。但由于土木工程内部空间较大,使用该方法通常需要扫描获取周围空间海量的点云数据,再对点云数据处理及运算得到空间轮廓模型,这对扫描设备性能以及后续数据计算能力要求较高,一定程度地限制了这项技术在土木工程内部空间轮廓测绘上的应用。
技术实现思路
1、本发明所解决的技术问题在于提供一种用于土木工程内部空间轮廓的扫描测绘方法及装置,能够降低空间轮廓模型建模的计算能力要求。
2、本发明提供的基础方案:一种土木工程内部空间轮廓扫描测绘方法,包括以下步骤:
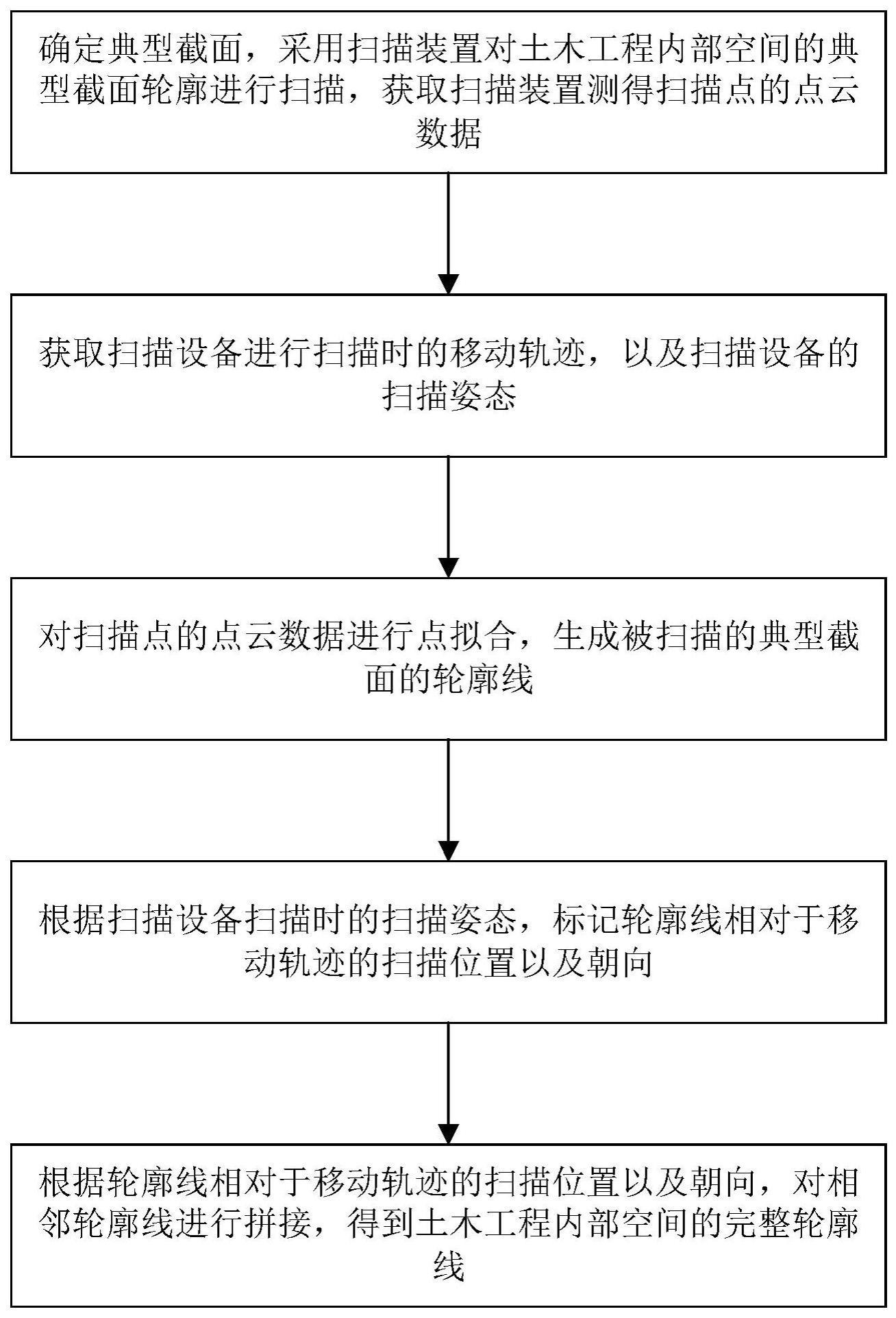
3、s100:确定典型截面,采用扫描装置对土木工程内部空间的典型截面轮廓进行扫描,获取扫描装置测得扫描点的点云数据;
4、s200:获取扫描设备进行扫描时的移动轨迹,以及扫描设备的扫描姿态;
5、s300:对扫描点的点云数据进行点拟合,生成被扫描的典型截面的轮廓线;
6、s400:根据扫描设备扫描时的移动轨迹,标记轮廓线相对于移动轨迹的扫描位置以及朝向;
7、s500:根据轮廓线相对于移动轨迹的扫描位置以及朝向,对相邻轮廓线进行拼接,得到土木工程内部空间的完整轮廓线。
8、本发明的原理在于:在进行扫描前,确定土木空间内部的典型截面,对典型截面轮廓进行扫描,得到扫描点的点云数据。在扫描的同时,获取到扫描设备的移动轨迹和扫描姿态。将扫描得到的扫描点进行拟合得到典型截面的轮廓线,在根据移动时的移动轨迹和扫描姿态,确定出各个典型截面轮廓线的位置和朝向。最后根据典型截面轮廓线相对于移动轨迹的位置和朝向,完成轮廓线的拼接,得到完整的土木空间内部完整轮廓线。
9、相比于现有技术,通过在扫描时,获取到扫描设备的移动轨迹和扫描姿态,从而确定得到进行扫描的截面相对于移动轨迹的相对位置。在后续数据处理时,直接根据截面相对于移动轨迹的相对位置进行拼接即可,降低了后续数据处理中,对于点云数据进行计算的计算量。
10、进一步,所述s100包括以下步骤:
11、s110:对典型截面进行标记,所述典型截面为能够完整、准确反映土木工程内部空间轮廓及构件尺寸的截面;
12、s120:采用激光扫描设备,对土木工程内部空间的典型截面进行环扫,获取典型截面反射的点云数据,所述点云数据包括激光射线长度、反射率、旋转角、扫描时间以及激光扫描设备的姿态角。
13、不同土木工程内部空间有不同的典型截面,选择能够完整、准确反映土木工程内部空间轮廓及构件尺寸的截面,确定好典型截面后,对典型截面进行扫描,得到点云数据。
14、进一步,所述s100和s200之间还包括数据处理步骤,所述数据处理步骤包括以下步骤:
15、步骤1:获取扫描时扫描点与扫描设备之间的距离和角度,以扫描设备为坐标系原点建立各个扫描点的三维坐标数据;
16、步骤2:计算相邻扫描点的三维坐标数据差值,当扫描点的三维坐标数据与前后相邻扫描点的坐标数据差值均超过预设的误差限值时,判断该扫描点为噪点数据并清除。
17、通过对噪点数据进行过滤和去除。根据扫描点扫描时于扫描设备之间的距离和角度,建立三维坐标系,得到扫描点的三维坐标数据。当相邻扫描点的三维坐标数据差超过误差限值时则认为是噪点数据,去除噪点数据,避免噪点数据造成误差,同时减少后续数据计算量。
18、进一步,所述数据处理步骤还包括以下步骤:
19、步骤3:获取扫描时扫描设备的扫描姿态,所述扫描姿态包括设备倾角;
20、步骤4:通过三角函数,换算扫描点在水平面或竖直面上的投影的二维坐标。
21、根据设备工作时的实时姿态,换算扫描点在水平面和竖直面上的投影,得到二维坐标,将点云数据的三维坐标转换为二维坐标,修正设备倾斜时对水平截面或竖直截面的扫描误差。
22、进一步,所述s300包括以下步骤:
23、s310:对一个扫描点的两个及以上的相邻扫描点进行直线拟合;
24、s320:判断两直线之间的夹角是否小于预设的设定值,当小于时,判断该扫描点为拐角点;
25、s330:获取两个相邻拐角点之间的拟合线,并将多个拟合线进行拼接,得到进行扫描的截面的轮廓线。
26、针对降噪、校正后的点云坐标数据,通过相邻扫描点的短线拟合以及短线之间的夹角关系,找出拐角点坐标。
27、进一步,所述s400包括以下步骤:
28、s410:获取扫描设备的移动迹线,并记录扫描设备在该迹线上的特征点位的参数数据,所述参数数据包括位置、时间、姿态;
29、s420:根据扫描设备的姿态,识别扫描的典型截面的方向;
30、s430:根据参数数据和典型截面的方向,得到典型截面轮廓线相对于移动迹线的位置及朝向。
31、通过赋予轮廓线相对与移动迹线的位置参数,根据各个扫描的截面的位置。
32、进一步,所述s500包括以下步骤:
33、s510:根据典型截面轮廓线相对于移动迹线的位置及朝向,将多个相邻的轮廓线沿移动迹线拼接,得到完整的轮廓线。
34、根据轮廓线相对于移动迹线的位置,对轮廓线进行拼接,以较小的计算量完成土木工程内部空间轮廓的构建。
35、本发明还公开了一种土木工程内部空间轮廓扫描测绘装置,用于上述的一种土木工程内部空间轮廓扫描测绘方法,包括控制器、激光扫描模块、惯性导航模块、激光示踪模块、通讯模块,所述控制器的输入端分别与激光扫描模块、惯性导航模块、激光示踪模块的输出端电连接,控制器的输出端与通讯模块的输入端电连接;
36、激光扫描模块,用于获取被扫描典型截面上的环形激光点云;
37、惯性导航模块,用于获取扫描设备的三轴姿态角以及加速度,控制器用于根据扫描设备的三轴姿态角以及加速度对扫描设备倾斜进行修正,以及对移动迹线进行标记;
38、激光示踪模块,示意激光扫描的切面位置;
39、通讯模块,用于将测得的数据上传服务器。
技术特征:
1.一种土木工程内部空间轮廓扫描测绘方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述s100包括以下步骤:
3.根据权利要求2所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述s100和s200之间还包括数据处理步骤,所述数据处理步骤包括以下步骤:
4.根据权利要求3所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述数据处理步骤还包括以下步骤:
5.根据权利要求4所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述s300包括以下步骤:
6.根据权利要求5所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述s400包括以下步骤:
7.根据权利要求6所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:所述s500包括以下步骤:
8.一种土木工程内部空间轮廓扫描测绘装置,用于权利要求1-7任一项所述的一种土木工程内部空间轮廓扫描测绘方法,其特征在于:包括控制器、激光扫描模块、惯性导航模块、激光示踪模块、通讯模块,所述控制器的输入端分别与激光扫描模块、惯性导航模块、激光示踪模块的输出端电连接,控制器的输出端与通讯模块的输入端电连接;
技术总结
本发明涉及工程测量技术领域,具体涉及了一种用于土木工程内部空间轮廓的扫描测绘方法及装置。包括以下步骤:S100:确定典型截面,采用扫描装置对土木工程内部空间的典型截面轮廓进行扫描,获取扫描装置测得扫描点的点云数据;S200:获取扫描设备进行扫描时的移动轨迹,以及扫描设备的扫描姿态;S300:对扫描点的点云数据进行点拟合,生成被扫描的典型截面的轮廓线;S400:根据扫描设备扫描时的扫描姿态,标记轮廓线相对于移动轨迹的扫描位置以及朝向;S500:根据轮廓线相对于移动轨迹的扫描位置以及朝向,对相邻轮廓线进行拼接,得到土木工程内部空间的完整轮廓线。能够降低空间轮廓模型建模的计算能力要求。
技术研发人员:李洋,帅海乐,赖振彬,向云燕,李昱江
受保护的技术使用者:贵州中建建筑科研设计院有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!