基于热应力形变分析的MEMS惯性器件温漂误差估计方法
本发明属于新型微惯性器件领域,具体涉及一种mems惯性器件温漂误差估计方法。
背景技术:
1、随着科学技术的不断发展与进步,依托于更多的自然资源以支持人类向着更加文明和谐、高水平可持续发展的美好愿景日益强烈。地球两极拥有丰富的自然资源储备和充沛的航运潜力,能更好地助力人类社会发展到更高阶段。然而,两极地区的环境温度具有大温差变化的特点,北极冬季最低气温可达-50℃以下,其夏季最高气温可达30℃以上。基于此,冰天雪地的陆地环境和浮冰涌动的水文条件极容易给自然资源开采、油气勘探、航道运输、科考活动带来诸多潜在风险。例如,北极油气管道和航运路线需要及时巡查并监测其工作状态,预防因外部环境因素引起的安全事故给生态环境带来灾难性后果。需要注意的是,严寒天气下(气温低于-20℃)依靠人工巡线监测是极其困难和危险的,严重时难以保证相关任务顺利进行,甚至会危及工作人员安全。为此,利用无人系统代替人工完成低温环境下室外作业正成为恶略环境下任务执行的主要手段。利用无人驾驶飞行器航线管理系统代替人工巡线监测,既保证工作人员安全又可以保证所执行任务的顺利进行。这表明,无人系统正在逐步接替有人系统的功能和职责,日渐成为执行两极地区任务的首要选择。
2、无人系统可靠执行预定计划、智能应对外部环境威胁需要自身搭载的航姿系统为其提供精准的姿态信息。在当前技术限制下,无人系统具有载重效率低且费效比高的技术劣势,承载高精度、小型化、低成本的子系统是无人系统的首要选择,因此,mems微惯性导航系统是是首选的技术方案。mems微惯性导航系统采用电容式mems微惯性器件作为核心部件,基于惯性导航算法可实现载体姿态检测以及惯性导航,电容式mems微惯性器件的输出精度决定了mems微惯性导航系统的姿态信息精度。同时,高集成度、低功耗、低成本是其独特的技术优势。然而,由于电容式mems微惯性器件由具有温度依赖性的硅基材料制成,当其从常温环境(20℃)转移至极区等酷寒环境(-30℃以下)时,环境温度突然跃变不可避免地会激励硅基材料物理特性变化,并由此进一步诱导其内部结构一致性改变,进而激励温漂误差并降低电容式mems微惯性器件的精准性和可靠性,严重时甚至可能导致无人系统的宕机或损坏,进一步威胁执行任务的顺利完成。
3、消除电容式mems微惯性器件温漂误差的根本方法在于完全解耦硅基材料的温度依赖性,消除环境温度大幅度变化对其内部结构一致性的影响。由于受到当前材料加工技术的限制,通过优化材料加工工艺达成完全消除硅基材料温度依赖性的技术目标难以实现。温度控制系统控制环境温度稳定于目标温度,可以有效减弱环境温度变化对其控制对象的温度冲击,以此间接实现解耦硅基材料的温度依赖性。需要注意的是,温度控制系统的系统构成较为复杂,这与电容式mems微惯性器件的高集成度、低功耗、低成本的技术优势相冲突。温漂误差估计模型以环境温度相关量为模型输入、以温漂误差为模型输出,基于先验数学模型实现任意精度下由环境温度相关量精准估计温漂误差。全面精准的环境温度相关量是准确估计温漂误差的基础,环境温度相关量的缺失势必会导致温漂误差估计失“真”且失“准”。此外,具有复杂模型结构的先验数学模型会降低估计实时性,并可能引入因补偿不及时导致补偿精度降低的风险。
4、综上所述,由于现有温漂误差估计方法的准确性和实时性较差,因此,如何又“准”又“快”地估计并补偿温漂误差成为提升电容式mems微惯性器件环境适应性最为有效的技术手段。
技术实现思路
1、本发明的目的是为解决现有温漂误差估计方法的准确性和实时性差的问题,而提出了一种基于热应力形变分析的mems惯性器件温漂误差估计方法。
2、本发明为解决上述技术问题所采取的技术方案是:基于热应力形变分析的mems惯性器件温漂误差估计方法,所述方法具体包括以下步骤:
3、步骤一、根据mems惯性器件传感电路的梳齿结构,确定出引起mems惯性器件温漂误差的全部温度参量;
4、步骤二、建立电容式mems惯性器件温漂误差模型,根据步骤一中确定出的温度参量构造训练数据集;
5、利用训练数据集对mems惯性器件温漂误差模型进行训练;
6、步骤三、根据mems惯性器件实际工作时的环境温度计算δt、δt2和δt-1/2,将计算出的δt、δt2和δt-1/2输入训练好的mems惯性器件温漂误差模型,利用mems惯性器件温漂误差模型输出实际的温漂误差。
7、优选地,所述步骤一的具体过程为:
8、步骤一一、将传感电路的梳齿结构抽象成由动极板和定极板构成的平板电容器,当环境温度为t0时,梳齿结构处于非形变的动基座情况,此时传感电路检测的电容值δc′为:
9、
10、其中,b0为动极板与定极板重叠的长度,c0为动极板与定极板重叠的宽度,d0为质量块处于中心平衡时的梳齿距离,ε为介电常数,δd为惯性信息激励下动极板的绝对偏移位移,k为静电力常量;
11、步骤一二、当环境温度变化时,硅微结构的热应力变化量σ为:
12、σ=αe(t-t0)
13、其中,δt=t1-t0,t1为变化后环境温度,t0为变化前环境温度,α为热膨胀系数,e为硅基材料的弹性模量;
14、将梳齿结构的长梁的宽度表示为h,将梳齿结构的长梁的长度表示为i,将梳齿结构的长梁的厚度表示为n,则长梁上任意位置的弯矩m(h)为:
15、
16、其中,x为积分变量;
17、在弯矩m(h)的作用下,定极板的梳齿厚度a1为:
18、
19、其中,a0为静基座情况下的定极板梳齿厚度;
20、在弯矩m(h)的作用下,动极板与定极板重叠的长度b1为:
21、
22、其中,e0为静基座情况下的动极板的梳齿厚度;
23、在弯矩m(h)的作用下,动极板与定极板重叠的长度c1为:
24、
25、在弯矩m(h)的作用下,平衡状态时动极板和定极板的梳齿间距d1为:
26、
27、在弯矩m(h)的作用下,动极板的梳齿厚度e1为:
28、
29、当环境温度由t0变化为t1时,则梳齿结构处于形变的动基座情况,此时传感电路检测的电容值δc″为:
30、
31、ln(·)是自然对数,令[a0e0/3α(a0+e0)]=a,则有:
32、
33、则环境温度变化前后,传感电路中测量的电容误差为:
34、
35、即电容误差δc∝f(δt,δt2,δt-1/2),当环境温度变化时,电容误差与环境温度变化量δt、环境温度变化量的平方δt2以及环境温度变化量的倒数平方根δt-1/2有关;
36、步骤一三、根据mems惯性器件的输出与mems惯性器件传感电路检测的电容值的相关性,确定出引起mems惯性器件温漂误差的温度参量为δt、δt2和δt-1/2。
37、优选地,所述mems惯性器件温漂误差模型为rbf神经网络模型。
38、优选地,所述rbf神经网络模型的核函数为:
39、
40、其中,φj(x)为隐含层第j个神经元的输出,cj为隐含层第j个神经元核函数的中心向量,σj为隐含层第j个神经元核函数的宽度,x为rbf神经网络模型的输入向量,||x-cj||是输入向量x和核函数中心向量cj之间的距离,e是自然对数的底数,k是隐藏层的神经元个数。
41、优选地,所述rbf神经网络模型的输出为:
42、
43、式中,yi′为输出层第i′个神经元的实际输出,wi′j为输出层第i′个神经元与隐含层第j个神经元之间的权重。
44、优选地,所述利用训练数据集对mems惯性器件温漂误差模型进行训练时,需要对wi′j、cj和σj进行调整,每次调整的幅度分别为δwi′j、δcj和δσj:
45、
46、其中,di′是输出层第i′个神经元的目标输出,ηw、ηc、ησ分别为δwi′j、δcj和δσj的学习速率系数。
47、优选地,所述步骤二中,训练数据集的构造方式为:
48、步骤1、利用硅脂将mems惯性器件贴附并固定在高低温箱的安装基座上,再将温度传感器与mems惯性器件紧贴;
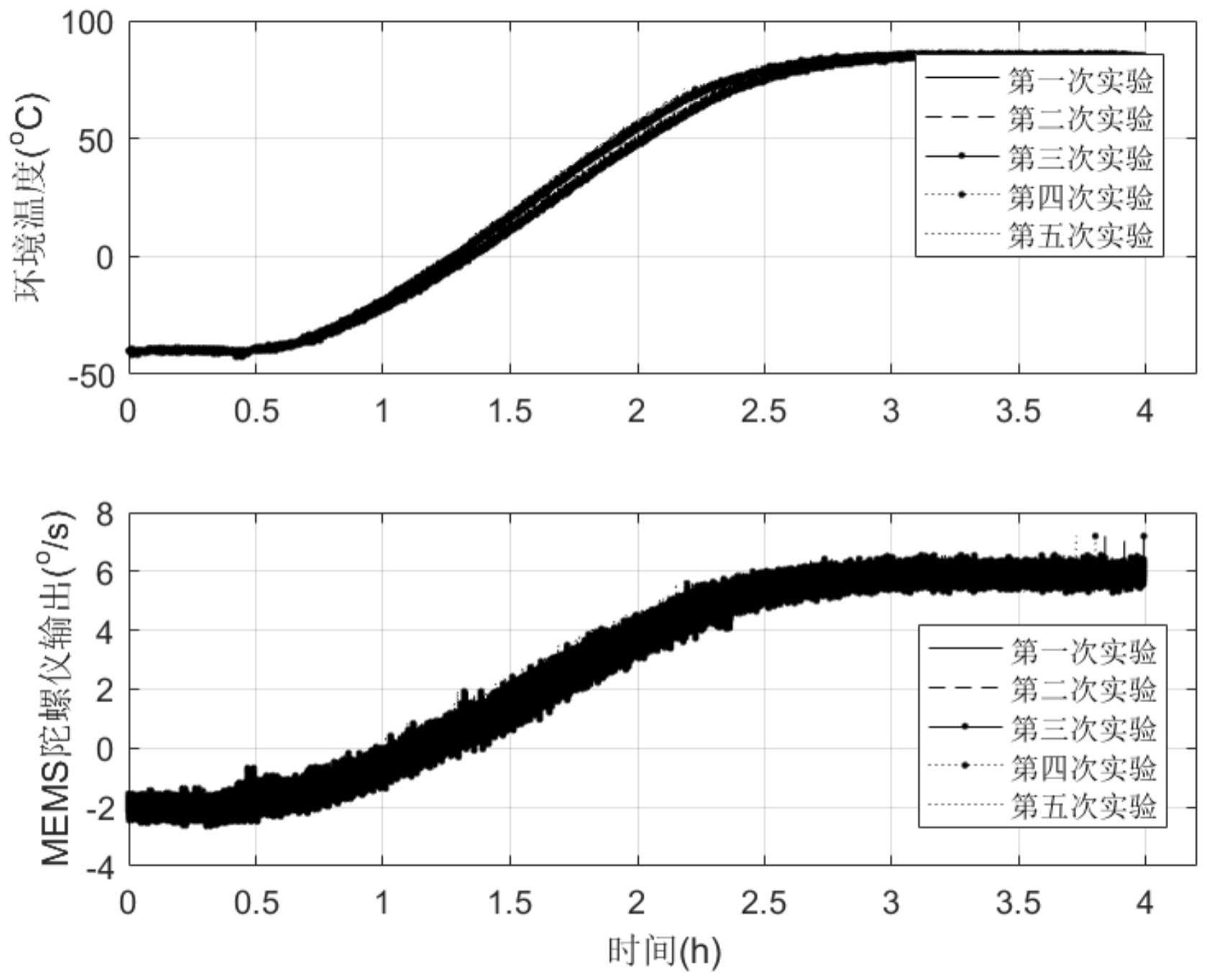
49、步骤2、将高低温箱的环境温度设置为mems惯性器件工作温度的下限值t′,待mems惯性器件与温度传感器的测试数据均稳定1小时后,保存mems惯性器件的输出值和环境温度作为一组数据;
50、步骤3、以固定的升温速率逐渐调整高低温箱的环境温度,并保存升温过程中mems惯性器件的输出值和环境温度,直至环境温度达到mems惯性器件工作温度的上限值t″;
51、步骤4、重复执行步骤2和步骤3的过程,直至达到设置的最大迭代次数时停止;
52、步骤5、对于保存下来的任意一组数据,将该组数据中的环境温度记为tr,将tr与参考温度作差后得到温度变化量δtr,再根据δtr计算出δtr2和δtr-1/2,将该组数据中mems惯性器件的输出值与参考输出作差,得到温漂误差;
53、同理,分别对保存下来的每组数据进行处理;
54、步骤6、根据步骤5的结果构造训练数据集,其中,训练数据集中包括输入矩阵和输出向量,即为输入矩阵中的一行元素,得到的全部温漂误差数据组成输出向量。
55、本发明的有益效果是:
56、本发明从热应力作用下微结构温度形变的角度入手,精准溯源致使温漂误差的环境温度相关量,较好地解耦硅基材料的温度依赖性,使得在环境温度复杂多变的情况下mems惯性器件的环境适应性得到了完全提升,可实现精准、实时、稳定、连续、可靠地温漂误差估计,再通过补偿温漂误差输出mems惯性器件的惯性信息。
- 还没有人留言评论。精彩留言会获得点赞!