基于飞艇平台误差校正的分布式雷达信号相参合成方法与流程
本发明涉及一种基于飞艇平台误差校正的分布式雷达信号相参合成方法,属于雷达技术设计领域。
背景技术:
1、对于运动平台的有源误差校正,一般通过引入位置精确已知的参考点对多站时间、相位同步误差和位置同步误差进行联合校正。然而,在实际应用中,有源动平台不可避免地受到平台自身抖动、gps测量误差等因素的影响,因此,有必要分析位置同步误差对参数估计精度的影响,并提出相应的解决方案。
2、多平台时间、相位和位置同步是实现多平台信号相参合成的重要前提。对于同步参数估计而言,根据信号相参合成方式的不同,可具体分为闭环结构和开环结构。闭环结构下,目标已被捕获,主要根据目标位置来补偿信号时延差和相位差,来实现目标位置处的信号相参合成。对于由k部雷达组成的系统,通过合成波束变窄的方式,在接收相参模式下,可获得k2倍相当于单雷达的snr增益;而在全相参模式下,snr增益可提升至k3倍。闭环结构最早由美国mit lincoln实验室的cuomo等人提出,并给出了峰值法、相关法和模型参数法三种目标参数估计方法,同时,该研究团队也搭建了实验系统,分别成功地实现了对铁塔、火箭和飞行器等典型目标信号的相参合成。中国航天科工二院23所的高红卫等人首次公开报告了国内的闭环实验系统,该系统由两部c或p波段雷达组成,均在相参跟踪模式下改善了目标snr。殷丕磊等人通过光纤传输的方式完成时间同步、定标的方式完成相位同步,但有线同步方案仅适用于地面系统,难以扩展到动平台系统中。相比闭环结构,开环结构无需事先获得目标参数,但需要多雷达间精确的时间、相位和位置同步支撑发射相参。开环结构是在通信领域的分布式发射波束形成技术的基础上衍变而来,在精确的位置、时间和相位同步的条件下,可以对任意方向的信号直接进行发射相参。估计同步参数之前,需先确定它的参数可识别性,一般使用混合克拉关-罗下界工具判别参数的可识别性——当snr趋于无穷大时,若混合克拉关-罗下界趋于零,则称该参数是可识别的。wan shuang等人分析了传感器位置同步误差的参数可识别性,指出利用两个非共线远场源可以自校正任意形状传感器的构型误差,但该研究仅限于两维空间的情况,孙培林等人则分析了mimo雷达初相的可识别性,总结到只有集中式mimo雷达的相对初相可识别。密歇根州立大学nanzer等人对开环系统的时间、相位和位置同步进行了大量研究,并搭建了小型实验系统。在该实验系统中,站间测距通过单程无线信号传输的方式完成,初相计算通过鉴相器识别信号在振荡器输出前后的相位差得到,而gps则辅助指向角测量的实现,尽管同步精度有限,由于信号相参合成对同步误差具有一定的稳健性,依然可以得到期望的输出。刘晓瑜等人联合站间直达波信号和辅助接收机信号来提高同步参数的估计精度,但该方法仍需要来自地面的至少3个辅助源的配合。
3、综上,上述研究大多集中在针对动平台部分同步参数估计的研究中,尚未考虑到整体时间、相位和位置同步误差的估计。因此,亟需利用星-空分布式系统的拓扑结构优势,深入挖掘可获得的接收信号和量测信息,提出适用于有源动平台的多站同步误差校正方法,进一步提升多站联合目标相参探测性能。
技术实现思路
1、本发明解决的技术问题是:针对目前现有技术中,存在的尚未考虑到整体时间、相位和位置同步误差的估计的问题,提出了一种基于飞艇平台误差校正的分布式雷达信号相参合成方法。
2、本发明解决上述技术问题是通过如下技术方案予以实现的:
3、一种基于飞艇平台误差校正的分布式多站雷达信号相参合成方法,其特征在于包括:
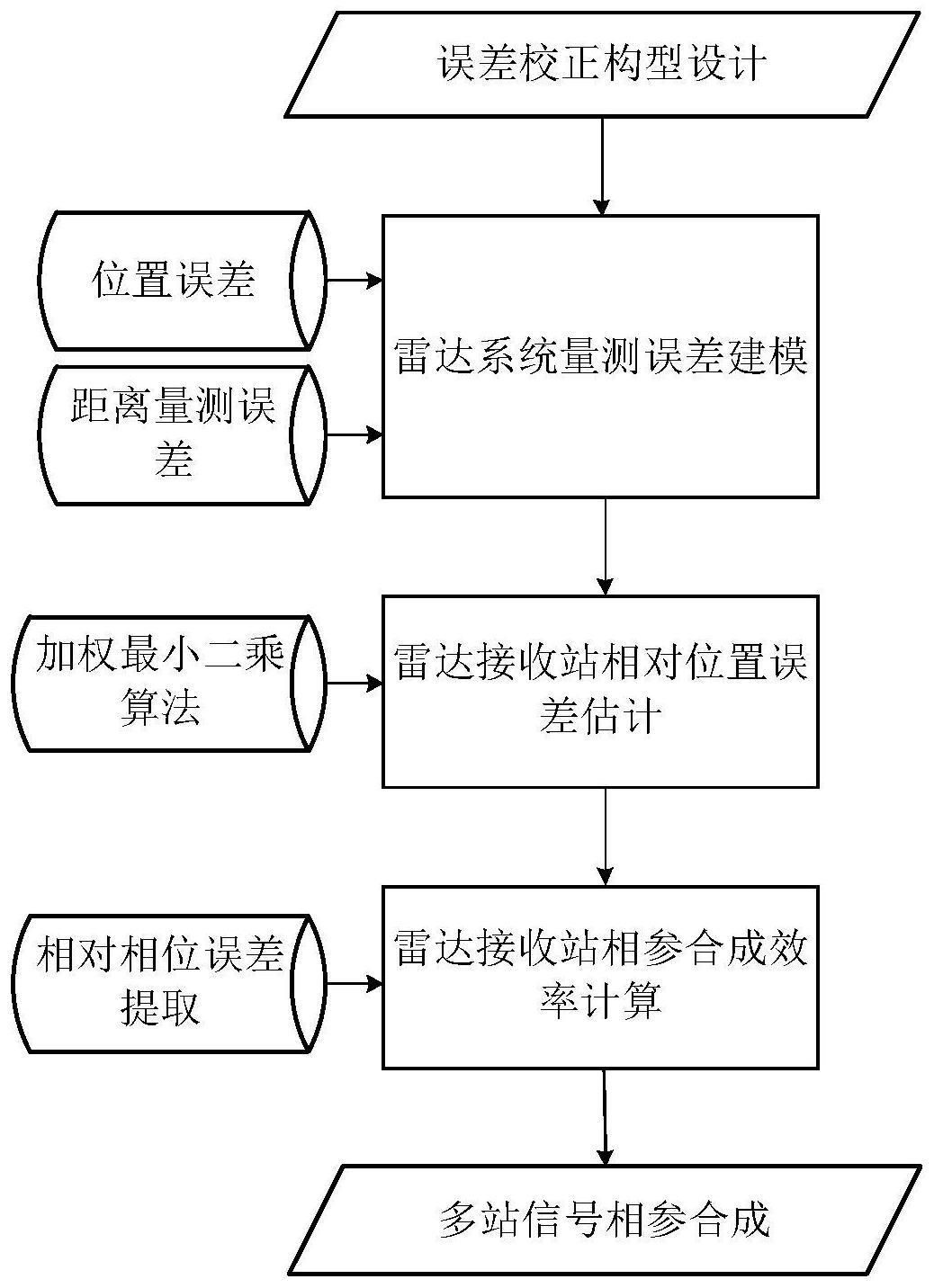
4、建立包括飞艇、机载雷达的雷达信号系统,根据飞艇位置及相关参数、机载雷达位置及相关参数构建雷达信号系统量测误差模型;
5、根据雷达信号系统量测误差模型的输出量计算机载雷达位置误差估计量;
6、以第一部机载雷达作为参考雷达,确定雷达信号系统中辐射源关于任意一部机载雷达到参考雷达的相位误差估计量;
7、根据任意一部机载雷达到参考雷达的相位误差估计量计算机载雷达相参合成效率,利用所得数据对雷达信号系统的误差校正效果进行评估。
8、所述雷达信号系统以飞艇为校正源,通过卫星作为辐射源,对机载雷达关于探测目标的量测能力进行校正;雷达信号系统量测误差模型根据飞艇位置、机载雷达位置、飞艇位置误差、机载雷达位置误差作为输入数据,输出量为辐射源到不同机载雷达的距离差、各机载雷达的相对相位误差,用于确定机载雷达位置误差估计量。
9、所述雷达信号系统中,包括m架飞艇和k部机载雷达,第m架飞艇位于为第m架飞艇的导航位置,δpm为该飞艇位置误差,且位置误差服从高斯分布
10、第m架飞艇到第k部雷达的距离rmk具体为:
11、
12、包含量测噪声的第m架飞艇到第k部雷达的距离nmk表示量测噪声,飞艇位置、量测噪声间关系满足表达式:
13、
14、所述雷达信号系统量测误差模型具体为:
15、2γknk+2akδp=hk-gkδuk
16、式中,γk为量测噪声矩阵,nk为由元素nmk组成的m×1维量测噪声向量,ak为位置量测矩阵,δp为飞艇位置误差向量,hk为先验量测矩阵,gk为误差耦合矩阵,δuk为机载雷达位置误差。
17、所述雷达信号系统量测误差模型中各矩阵表达式具体为:
18、
19、
20、
21、
22、
23、机载雷达位置误差估计量的计算方法具体为:
24、
25、式中,wk为加权矩阵,其中:
26、
27、nk=[n1k n2k … nmk]t。
28、任意一部机载雷达到参考雷达的相位误差估计量计算方法具体为:
29、针对第k部机载雷达:
30、
31、
32、式中,表示第k部雷达接收辐射源的信号相位相位差测量值,为相对位置误差δuk1的估计值,常数项t0=2πf0,f0为信号载频,δθt表示高轨卫星的发射相位误差,表示第k部雷达的接收相位误差,表示第k部雷达的接收相对相位误差。
33、机载雷达相参合成效率η计算方法为:
34、
35、式中,mean代表求均值操作。
36、利用所得数据对雷达信号系统的误差校正效果进行评估,通过机载雷达相参合成效率η反映机载雷达相对位置测量能力,机载雷达相参合成效率η根据飞艇校正源自身位置误差的控制能力进行提升。
37、本发明与现有技术相比的优点在于:
38、本发明提供的一种基于飞艇平台误差校正的分布式雷达信号相参合成方法,提出基于有源校正源的空中目标相对位置误差估计方法,采用不同不精确有源校正源建立多组混合量测方程,通过反向地计算待估计雷达中位置误差参数,获取多站相对位置误差估计结果,相比经典的时差定位方法节省了外部校正源数目,具有良好的工程应用前景;同时基于不精确校正源的相对相位误差估计方法,该方法中巧妙地引入远场高轨卫星辐射源进行相对相位误差估计,显著降低了飞艇平台校正方案中位置误差残差对相对相位估计精度的影响,通过补偿接收雷达站间因路径引起的相位差之后,可以获得相对相位的精确估计。
- 还没有人留言评论。精彩留言会获得点赞!