一种多轴原位拉伸压缩测试仪器控制系统及方法
本发明涉及材料性能原位测试,具体涉及一种多轴原位拉伸压缩测试仪器控制系统及方法。
背景技术:
1、作为人类文明的物质基础和先导,材料科学在社会发展中占据着重要的地位。原位力学性能测试是指通过电子显微镜、原子力显微镜或光学显微镜等仪器,在微/纳米的尺度下对测试件材料在各类载荷及工况下进行力学性能测试与研究的过程。通过观测在实验结果中显现的微观形变、损伤、晶粒位错等各种现象,并结合实验过程中采集的其他数据,综合剖析材料性能及机理。在众多原位力学测试方法中,原位拉伸压缩测试是其中重要的一种,其在各向异性材料的测试中表现优异。材料在各种工况下的大量服役性能数据均可通过原位拉伸压缩测试仪器实验获得。
2、现有的原位拉伸压缩测试仪器大多为单/双轴拉伸压缩设计,且对于工况加载功能部分的考虑较为欠缺。在控制方面,现有原位拉伸压缩测试仪器大多采用传统pid控制或采用直接信号控制的方式,整体控制系统对于系统自身不确定性以及外界干扰和负载扰动缺乏考虑。这将导致现有控制系统具有十分不稳定的控制能力与控制效果,并且由于未考虑过程控制的概念,导致实验过程中因测试仪器本身带来差异与未知影响。同时,现有测试仪器对于多轴的实时控制方面并未进行细致考虑,各轴向加载情况存在差异性与不可控性,给材料多向服役性能的研究带来了困难。另一方面,现有原位拉伸压缩测试仪器各传感器及执行器采用点对点布线方式,导致控制仪器端接口复杂、设备布置难度高、测试仪器与电镜装配难度高、设备可移植性差等诸多不良影响。此外,现有测试仪器的数据采集方式单一,各部分数据割裂不统一,为后期实验分析带来了很大的困难。重要的,现有原位拉伸压缩测试仪器缺乏功能安全与仪器保护的功能设定,当测试仪器控制电路失效或试件断裂等特殊情况发生时,无法对测试仪器与观测仪器进行有效保护与情况处置。
技术实现思路
1、本发明的目的在于提供一种多轴原位拉伸压缩测试仪器控制系统及方法,能够有效克服材料原位拉伸压缩性能测试过程中存在的不稳定不完善的控制难点、多轴控制独立不可控、测试仪器自身对测试结果产生影响、测试设备因接口复杂带来设备兼容性与可移植性差、设备缺乏功能安全与设备安全等关键问题。
2、为实现上述目的,本发明提供如下技术方案:
3、本发明的一种多轴原位拉伸压缩测试仪器控制系统,包括:拉伸压缩执行部分、环境氛围加载部分、物理量数据采集部分、信号传递部分和数据处理及控制部分;所述拉伸压缩执行部分、环境氛围加载部分和物理量数据采集部分共同组成测试仪器主体,所述测试仪器主体与数据处理及控制部分之间通过信号传递部分进行链接,实现信号传递;
4、所述拉伸压缩执行部分由多轴拉伸压缩机构组成,用于安装固定实验试件并对试件进行力加载工作;
5、所述环境氛围加载部分由氛围加载器组成,用于为试件创造各类复杂测试环境;
6、所述物理量数据采集部分由氛围传感器和双向拉压力传感器组成,用于采集环境中的物理量参数;
7、所述信号传递部分由总线结构和两个终端电阻组成,用于实现测试仪器主体与数据处理及控制部分之间的双向通讯,传递传感器实时信息和控制指令;
8、所述数据处理及控制部分由控制程序和运行平台组成,所述控制程序中嵌入数据处理算法;所述数据处理及控制部分用于接收、处理和记录测试仪器主体实时状态信息,并将数据送入控制程序以便生成控制指令。
9、进一步的,所述总线结构采用高速can-bus总线,所述高速can-bus总线包括can_high线和can_low线,用来传输对称的差分电平信号,以获得更好的电磁兼容效果。
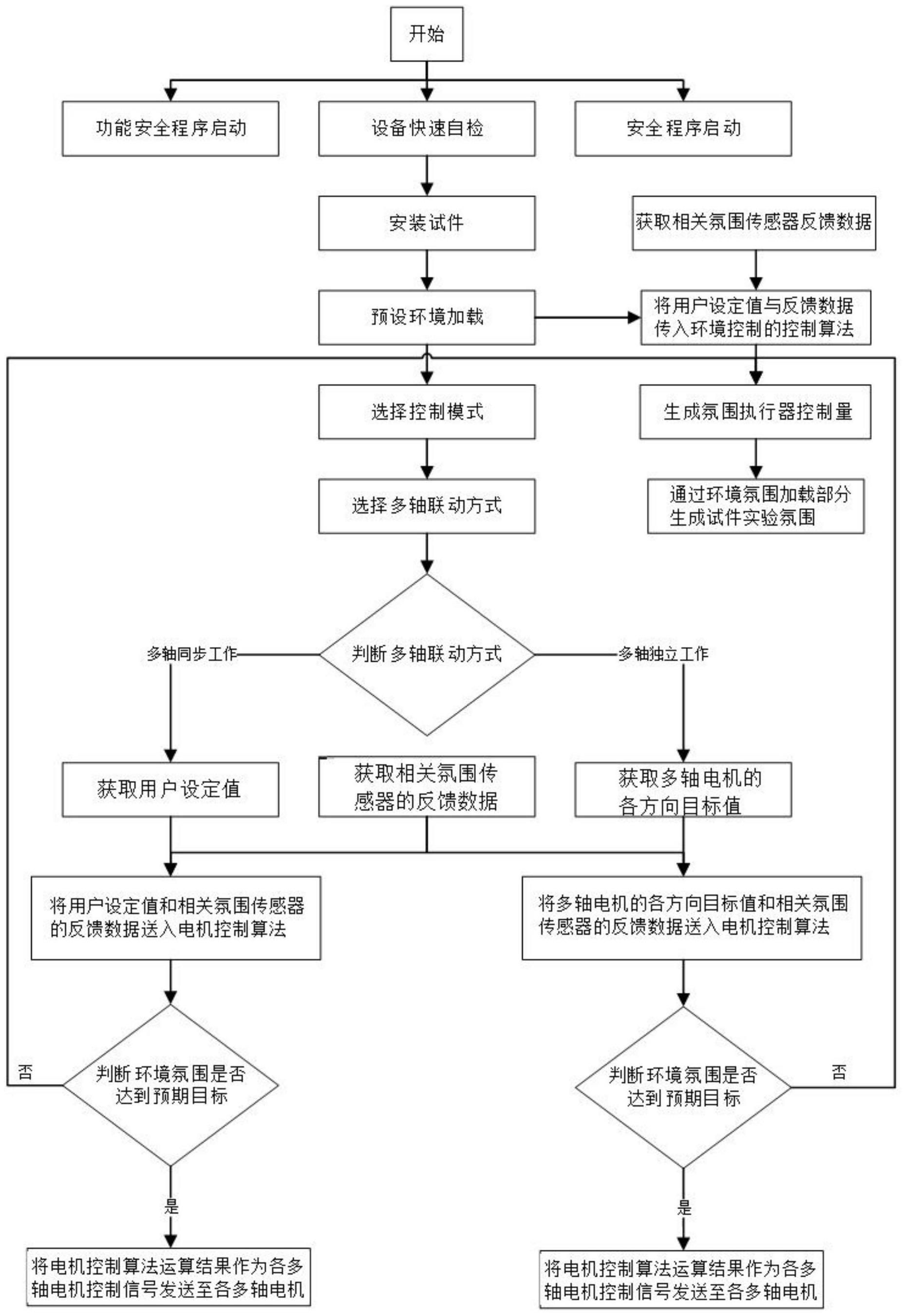
10、本发明的一种多轴原位拉伸压缩测试仪器控制方法,采用上述的一种多轴原位拉伸压缩测试仪器控制系统实现,该方法包括以下步骤:
11、步骤s1:设备开机将自动进入设备快速自检环节,启动功能安全程序和安全程序并执行功能安全开机自检;
12、步骤s2:安装试件并通过数据处理及控制部分的控制程序界面调整试件安装位置;
13、步骤s3:用户进行预设环境加载,将用户设定值作为控制函数目标值,获取相关氛围传感器的反馈数据作为实时状态量,将用户设定值与相关氛围传感器的反馈数据一并传入环境控制的控制算法中进行运算,并生成氛围加载器控制量上传至环境氛围加载部分中并生成试件实验氛围;
14、步骤s4:用户选择控制模式,所述控制模式包括位移控制模式或力控制模式;
15、步骤s5:用户选择多轴联动方式,所述多轴联动方式包括多轴同步工作模式和多轴独立工作模式;
16、步骤s6:将用户设定值作为控制函数目标值输入至数据处理及控制部分的控制程序中;
17、步骤s7:对于多轴同步工作模式,将用户设定值和相关氛围传感器的反馈数据送入电机控制算法中进行运算,并判断实验环境氛围是否达到预期目标,当实验环境氛围达到预期目标时将电机控制算法运算结果作为各多轴电机控制信号发送至各多轴电机,否则将等待实验环境氛围达到用户设定值阈值范围内再进行控制信号输出;对于多轴独立工作模式,将多轴电机的各方向目标值和相关氛围传感器的反馈数据送入电机控制算法中进行运算,并判断实验环境氛围是否达到预期目标,当实验环境氛围达到预期目标时将电机控制算法运算结果作为各多轴电机控制信号发送至各多轴电机,否则将等待实验环境氛围达到用户设定值阈值范围内再进行控制信号输出。
18、进一步的,步骤s1中,所述功能安全程序的运行原理如下:
19、首先电机编码器、光栅尺、惯性测量单元imu、导轨终端行程开关测量获得的原始数据通过高速can-bus通信以广播形式进行发送;数据处理及控制部分通过总线中报文内容的id选择接收相关原始数据信息,并将原始数据信息输入数据处理算法,数据处理算法将从得到的原始数据中根据校验位将整体数据进行校验和恢复,之后将多种不同数据统一为同一计量形式以便使用与评判,经过数据处理后的数据已具备同一维度对比的特征,将交由功能安全程序判断。
20、进一步的,步骤s1中,所述功能安全程序的工作模式包括开机自检模式和日常模式;所述开机自检模式用于在设备开机初期,由电机带动拉伸压缩执行部分在导轨上快速向外移动,直至导轨终端行程开关被触发,执行复位操作,在此过程中,电机编码器、光栅尺、惯性测量单元imu、导轨终端行程开关经处理归一化的数据将采集记录到功能安全程序;所述功能安全程序将根据数据处理后的数据进行匹配,判断数据是否在误差范围内,并将判断结果作为初始数据标签值传递给数据处理及控制部分的控制程序;匹配后的关系将作为影响因子,反馈至数据处理算法更新匹配关系;在所述日常模式中,电机编码器、光栅尺、惯性测量单元imu将作为冗余数据源,当某一数据源出现与其他数据源数据匹配度超出阈值范围时,功能安全程序将快速作出反应,输出相应故障数据标签,防止控制程序使用错误数据。
21、进一步的,步骤s1中,所述安全程序与功能安全程序配合,获得各数据异常情况;对于异常数据,安全程序将结合控制时间及往期错误日志情况更新并记录错误日志;当错误日志出现频次高于设定阈值后,安全程序将在数据处理及控制部分的控制程序界面生成警告消息弹窗。
22、进一步的,步骤s3中,所述环境控制的控制算法采用pid比例积分微分控制算法。
23、进一步的,步骤s4和步骤s7中,所述电机控制算法采用mpc模型预测控制算法。
24、进一步的,步骤s4中,如果选择位移控制模式,电机控制算法将通过运动参数对各多轴电机控制的移动平台位置进行控制;如果选择力控制模式,电机控制算法将通过力参数及运动参数对各多轴电机控制的移动平台位置进行控制。
25、进一步的,步骤s5中,在所述多轴同步工作模式下,系统将控制多轴电机以相同控制函数目标值进行工作;在所述多轴独立工作模式下,系统分别对多轴电机的各个轴进行目标设定获取各方向目标值,多轴电机的各个轴将按照各方向目标值进行工作。
26、相较于现有技术,本发明的有益效果如下:
27、1、本发明使用了总线控制设计,包含各部分传输数据类型,实现了数据高速、高抗干扰传输以及设备更加简洁的线束布置。
28、2、本发明通过使用mpc模型预测控制算法,引用更多被控原件物理量作为控制输入实现拉伸压缩动作高精度闭环控制的同时,可根据实际需求选取某种目标物理量实现快速精准的拉伸压缩控制以及平稳、抗干扰的控制过程,提升了系统抗干扰能力,增强了系统鲁棒性,确保了因原位测试仪器自身精度与动作策略对实验现象影响的最小化。
29、3、本发明通过创新的功能设计,设计了丰富的控制模式,使得仪器可以执行各种加载模式,如:多轴同步加载、多轴差异化加载、位移加载模式、力加载模式、复合工况模式、变工况模式等;同时引入了多物理量控制模式以及多轴联动、多轴分动的工作模式,丰富了系统功能。
30、4、本发明将氛围加载引入设计系统,通过pid控制实现环境氛围控制,在保证实现效果的前提下减小了系统负载。
31、5、本发明通过硬件层面的冗余设计,结合软件层次的功能安全设计,引入功能安全与仪器保护的功能,实现了设备自标定、自校验,极大程度降低了设备故障率,保证了设备始终受控,保证了相关实验设备的精准性、安全性和可靠性。
32、6、本发明通过功能安全设计,实现了试件断裂监测功能,确保控制系统不会因受到试件断裂导致安全事故,并保护了系统外其他观测设备的安全。
33、7、此外,本发明具有一套有效的安全程序,结合数据时间同步技术,能够保证设备及数据安全可靠。
- 还没有人留言评论。精彩留言会获得点赞!