双航迹合成孔径雷达干扰源定位方法、系统、存储介质和电子设备
本发明涉及信号处理,尤其涉及一种双航迹合成孔径雷达干扰源定位方法、系统、存储介质和电子设备。
背景技术:
1、目前,合成孔径雷达(synthetic aperture radar,简称sar)是一种能够对地面进行精确、连续观测的主动微波遥感技术,在许多领域得到了广泛的应用。然而,随着科学技术的不断发展,各种电子设备不断涌现,电磁环境也随着时代的发展而不断恶化。干扰越来越多地出现在sar图像中,并且越来越严重和普遍。
2、为了减少电磁干扰对sar系统的影响,研究人员提出了大量的干扰抑制算法,可以抑制不同情况下的干扰。参数化、半参数化、非参数化干扰抑制算法相继被提出,且均在一定条件下能够完成干扰抑制的任务。然而,大多数现有算法在sar系统接收到干扰后抑制干扰,均为被动抑制,此时干扰已经影响了有用的信号,使用上述算法被动抑制干扰,效果有限。通过主动避开干扰的来源或提前采取措施防止干扰信号进入sar系统,这种措施对sar系统的保护效果将优于被动干扰抑制。但这种方式需要提前预知干扰源位置信息,因此,干扰源的精确定位有利于提升sar系统主动抗干扰能力。
3、针对干扰源的定位方法较多,但大多不适用于sar系统,针对sar的干扰源定位方法研究较少,双航迹数据为sar系统在不同时间按照不同角度对某一区域进行观测得到的数据,在过去的研究中鲜有利用该数据完成sar的干扰源定位,并且现有算法定位精度较低。
4、综上所述,如何获得高质量的sar图像,针对sar干扰源的精准定位能够使sar系统能够主动规避干扰或防止不同电磁干扰进入接收机,不再受到多种电磁干扰的影响,进而增强sar系统的主动抗干扰能力,是现有技术中未解决的技术问题。
技术实现思路
1、本发明的目的是提供一种双航迹合成孔径雷达干扰源定位方法、系统、计算机可读存储介质和电子设备,能够克服现有技术的缺陷,增强sar系统的主动抗干扰能力。
2、本发明采用的技术方案为:
3、一种双航迹合成孔径雷达干扰源定位方法,包括:
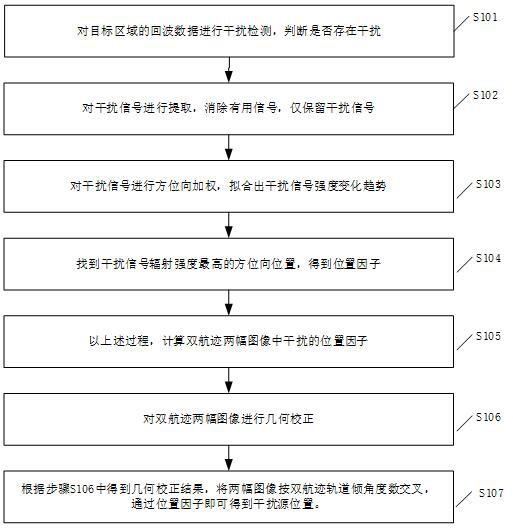
4、步骤s101、对目标区域的回波数据进行干扰检测,判断是否存在干扰;
5、步骤s102、对干扰信号进行提取,消除有用信号,仅保留干扰信号;步骤s103、对干扰信号进行方位向加权,拟合出干扰信号强度变化趋势;
6、步骤s104、找到干扰信号辐射强度最高的方位向位置,得到位置因子;
7、步骤s105、重复上述步骤s101-步骤s104,分别计算双航迹两幅图像中干扰的位置因子;
8、步骤s106、对双航迹两幅图像进行几何校正;
9、在步骤s107、根据步骤s106中得到几何校正结果,将校正后的两幅图像按双航迹轨道倾角度数交叉,通过位置因子即可得到干扰源位置。
10、在步骤s101中,对目标区域的回波数据进行干扰检测,判断是否存在干扰,具体为:
11、根据干扰信号的特征,可得知干扰一般具有较强的功率,且干扰信号对应的特征值均大于合成孔径雷达信号的特征值;
12、令nr和na分别代表距离向和方位向采样点,将si(τr),r=1,2...,nr,i=1,2,...,na代入如下矩阵结构:
13、
14、其中,l是子空间矩阵的维数,且m=nr+l-1;协方差矩阵可以表示为:
15、τr为距离向快时间,si(τr)代表每一方位时刻的信号特征值。
16、然后进行特征值分解可得:其中,λ=diag(γ1,γ2,γ3,…,γl),γ为本征值,本征向量为e=[∈1,∈2,∈3,...,∈l];
17、以逐脉冲的方式重复上述过程,并在特征值分解每次处理获得最大特征值后,可以得到最大特征值序列,可以表示为:
18、
19、其中ξi=max{γ1,γ2,γ3,…,γl},每次特征值分解后均可得到一个ξi;当该值大于阈值α时,则认为该处信号有干扰,小于阈值α时,则无干扰,一般阈值α取为2。
20、在步骤s102中,对干扰信号进行提取,消除有用信号,仅保留干扰信号,具体为:
21、将非干扰信号部分置零,可由下式表示:
22、
23、此时,目标区域中仅存在干扰信号。
24、在步骤s103中,对干扰信号进行方位向加权,拟合出干扰信号强度变化趋势,具体为:
25、对干扰提取后的信号进行方位向加权,得到干扰信号在方位向维度的强度值p:
26、,
27、代表在方位采样为na时刻的干扰信号强度。
28、在步骤s104中,找到干扰信号辐射强度最高的方位向位置,得到位置因子,具体为:
29、令位置因子为x,则:
30、其中,当达到最大值时,此时ni=i
31、ni=i,ni代表信号强度达到最大时的某一方位时刻。
32、在步骤s105中,以上述过程,计算双航迹两幅图像中干扰的位置因子,具体为:
33、针对目标区域的双航迹两幅数据,分别进行上述干扰检测,当目标区域双航迹数据均存在干扰,对干扰进行提取,然后计算位置因子,得到位置因子xa和xd。
34、在步骤s107中,根据步骤s106中得到几何校正结果,将两幅图像按双航迹轨道倾角度数交叉,通过位置因子即可得到干扰源位置,具体为:
35、根据几何校正后的双航迹两幅图像,按照合成孔径雷达系统的采集轨道倾角度数,对两幅图像按地理坐标进行交叉处理,使两幅图像部分区域重合,此时,可认为双航迹图像干扰交叉的部分为干扰源存在的位置;然后根据步骤s105求出的双航迹数据中干扰的位置因子xa和xd,进行如下计算:
36、ia=xa×xa
37、id=xd×xd
38、其中,xa和xd分别为双航迹两幅图像方位向的像素总数,我们认为,ia和id即干扰在合成孔径雷达双航迹图像中干扰源存在的方位向位置,将两幅图像方位向位置进行交叉,交点处即为干扰源精准位置。
39、一种双航迹合成孔径雷达干扰源定位系统,包括:
40、干扰检测单元,配置为从输入系统的合成孔径雷达数据中检测是否存在干扰;
41、干扰提取单元,配置为对原始回波数据进行干扰提取,去除有用信号,仅保留干扰信号;
42、位置因子计算单元,配置为对干扰信号进行方位向加权,拟合信号变换的强度变化,计算出位置因子;
43、几何校正单元,配置为对原始回波信号成像处理,得到合成孔径雷达图像,对双航迹两幅图像进行几何校正,使图像位置与地理位置一致;干扰源交叉定位单元,配置为利用几何校正结果,将两幅图像按双航迹轨道倾角度数交叉,通过位置因子即可得到干扰源精准位置。
44、一种存储装置,其中存储有多条程序,所述程序应用由处理器加载并执行以实现所述的含双航迹合成孔径雷达干扰源定位方法。
45、一种电子设备,包括存储装置、处理器;处理器,适用于执行各条程序;存储器,是用于存储多条程序;所述存储器执行所述处理器上的程序时实现所述的含双航迹合成孔径雷达干扰源定位方法。
46、本发明首先通过对目标区域的回波数据进行干扰检测,判断是否存在干扰,并对干扰信号进行提取,消除有用信号,仅保留干扰信号。然后对干扰信号进行方位向加权,拟合出干扰信号强度变化趋势,找到干扰信号辐射强度最高的方位向位置,得到位置因子,通过上述过程,计算双航迹两幅图像中干扰的位置因子,最后对双航迹两幅图像进行几何校正,根据得到几何校正结果,将两幅图像按双航迹轨道倾角度数交叉,通过位置因子即可得到干扰源位置。通过本发明,能够精确定位合成孔径雷达图像中干扰源的地理位置,有利于后续合成孔径雷达系统主动规避干扰源或提前采取措施防止干扰信号进入接收机,可有效减轻多种电磁干扰对合成孔径雷达图像的影响。
- 还没有人留言评论。精彩留言会获得点赞!