一种激光雷达及该激光雷达的反馈控制方法与流程
本发明涉及自动驾驶,尤其涉及一种激光雷达及该激光雷达的反馈控制方法。
背景技术:
1、目前激光雷达利用转镜或振镜实现光束的扫描。对于发射与接收使用同一扫描装置的激光雷达,会因为发射光束与接收光束之间存在时延而导致接收的回波信号的角度滞后于系统光轴的角度,从而产生滞后角,滞后角的大小与转镜的转速以及探测距离有关。
2、如图1所示,当激光雷达不进行扫描,即扫描装置101为静止状态时,回波信号和发射信号的方向均平行于光轴,此时回波信号经准直系统102准直后聚焦到光芯片103端面的位置称为理想聚焦位置104。
3、当激光雷达开始扫描后,扫描装置开始不断摆动,此时由于回波信号与发射信号之间存在短暂的时延差,在这段时延差内,扫描装置101就会转过一个角度,到达虚线扫描装置所在位置,因此回波信号经扫描装置101反射后与光轴之间会产生角度差,该角度差即为滞后角a。具有滞后角a的回波信号再经过准直系统102准直后产生的实际聚焦位置105相对理想聚焦位置104就会产生偏移。此时若使用传统的准直器接收方式将回波信号耦合至光纤,就只能接收到理想聚焦位置的回波信号,当回波信号聚焦位置偏移时,接收效率就会急剧下降,继而导致激光雷达探测性能的降低甚至失效。
4、为解决上述技术问题,本领域技术人员提出利用光纤阵列增大信号光的接收面积,并使用光束合成模块将功率合并,但这种方案是基于光纤进行搭建的,不是集成化的芯片,没有小型化的优势,并且大面积信号光的聚焦位置不会发生变化,也就无法解决回波信号滞后角的问题。本领域技术人员还提出使用多通道的方式接收信号光,如公开号cn116087914a与cn115639543a的专利文件,存在的技术问题是当回波信号聚焦的位置产生变化时,多路输入的信号光的功率不同且相位差不固定,使得合束时会引入较大的损耗,且由于没有考虑回波信号聚焦在不同位置时,耦合至各路波导中的光相位差也是不同的,使得目前的多通道接收方案无法实时保证较高的光接收效率。
技术实现思路
1、为解决上述技术问题,本发明提供
2、为了对披露的实施例的一些方面有一个基本的理解,下面给出了简单的概括。该概括部分不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围。其唯一目的是用简单的形式呈现一些概念,以此作为后面的详细说明的序言。
3、本发明采用如下技术方案:
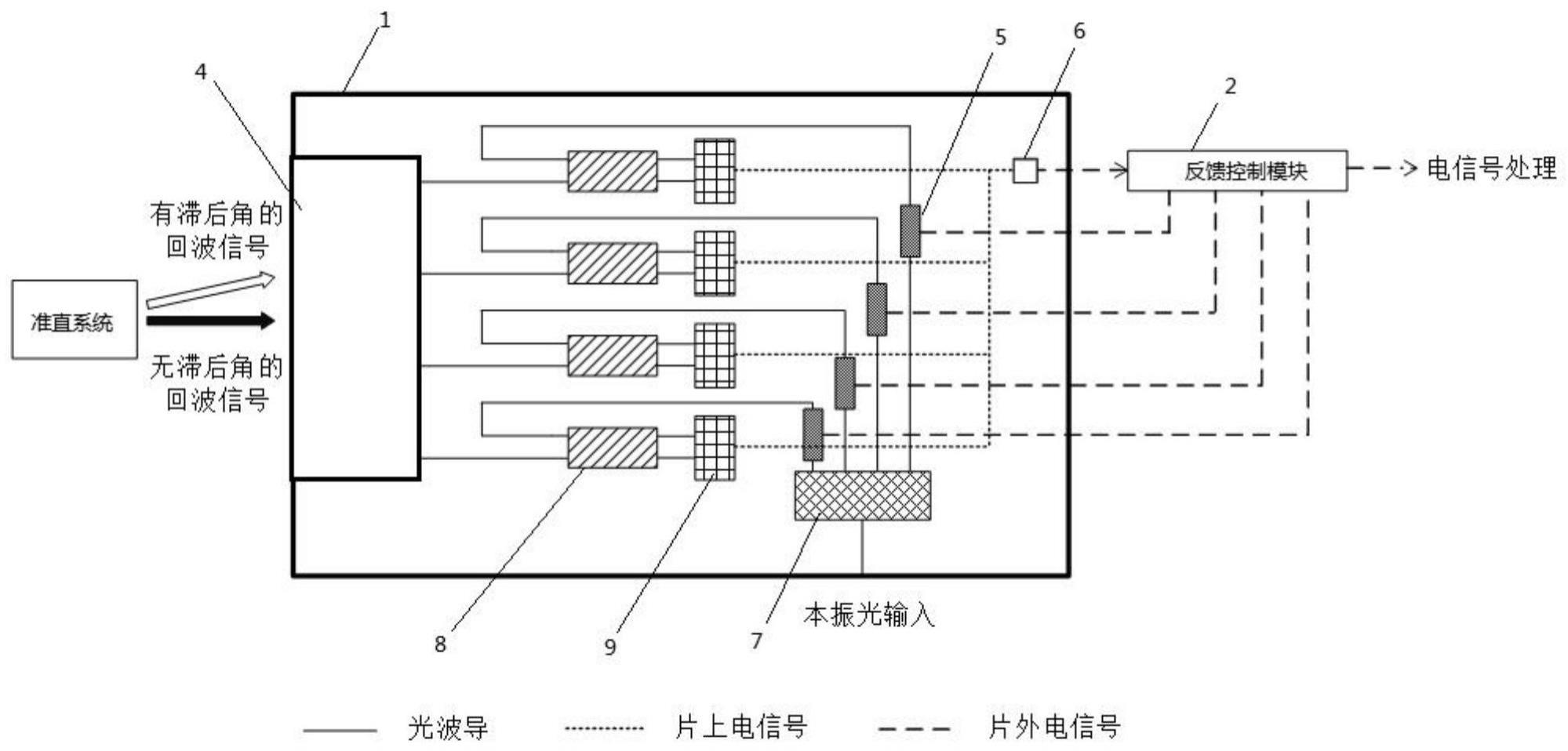
4、本发明提供一种激光雷达,包括:接收芯片;还包括:反馈控制模块;
5、所述接收芯片上集成的器件包括:
6、耦合器阵列,用于将回波信号作为信号光耦合至芯片内各路光波导中,且覆盖范围大于回波信号聚焦位置的偏移距离;
7、相移器组,用于调节各路本振光的相位,为各路拍频电流信号引入相移,其中,所述拍频电流信号是由本振光与信号光混频后再转换为电流信号并做差得到的;
8、电流信号合束模块,用于将各路拍频电流信号合束为总拍频信号;
9、所述反馈控制模块获取所述总拍频信号,并根据所述总拍频信号的幅度值调节施加在所述相移器组上的电压,以改变各路本振光的相位,直至所述总拍频信号的电流值达到最大。
10、进一步的,所述耦合器阵列由排布于所述接收芯片边缘的多个端面耦合器组成,所述端面耦合器的数量q满足下式:
11、
12、上式中,r为回波信号经准直系统聚焦后的光斑半径;l为滞后角a引入的最大光斑偏移距离,l=准直器焦距×tan(a);dl为端面耦合器的间距。
13、进一步的,所述回波信号经准直系统聚焦后的光斑半径r为5um;所述最大光斑偏移距离l小于10um;所述端面耦合器的间距dl为2um。
14、进一步的,所述耦合器阵列由多个垂直耦合器组成;所述垂直耦合器以线性排列方式布置于所述接收芯片的边缘,或均布于接收区域内,该接收区域覆盖回波信号的聚焦光斑以及聚焦光斑因滞后角产生偏移时外延的范围区域。
15、进一步的,所述接收芯片上集成的器件还包括:
16、1×n分束器,用于将输入至芯片上的本振光分为n路本振光,所述相移器组内的各相移器分别设置于所述1×n分束器的各输出端口,以调节各路本振光的相位;
17、2×2耦合器,用于将所述耦合器阵列输出的各路信号光,与所述相移器组调节后的各路本振光进行混频,并输出两路光信号;
18、平衡探测器,用于将所述2×2耦合器输出的两路光信号转换为电流信号并做差,以得到各路拍频电流信号,所述拍频电流信号ii的表达式如下:
19、
20、ii为第i路拍频电流信号;ai为第i路拍频电流信号的振幅;f为回波信号与本振光的频率差;为第i路拍频电流信号的初始相位;i=1,2,3…n,n为所述耦合器阵列耦合至芯片内的信号光的路数;是第i路相移器引入的相移。
21、进一步的,所述反馈控制模块获取的所述总拍频信号所述反馈控制模块包括:
22、监控单元,用于实时获取总拍频信号it的电流值;
23、步进单元,用于依次调节施加在各相移器上的电压vi;
24、判断单元,用于每当所述步进单元完成步进后,判断总拍频信号it是否增大,若增大则判定下次步进方向为维持当前步进方向,否则改变当前步进方向;
25、限定单元,用于获取电压调节下限值vl与电压调节上限值vm,并判断当前vi是否达到vl或vm,若vi调节至vl且仍需减小时,令vi跳变至vm并继续减小,若vi调节至vm且仍需增大时,令vi跳变至vl并继续增大;
26、其中,vi为施加在第i路相移器上的电压值,i=1,2,3…n,n为所述耦合器阵列耦合至芯片内的信号光的路数;
27、其中,所述步进单元调节vi的方式为,按照步进方向在当前vi基础上增加δv或减小δv,δv是电压调节的最小步进幅度,所述步进方向包括正向步进与负向步进,所述步进单元进行正向步进是指在当前vi基础上增加δv,进行负向步进是指在当前vi基础上减小δv。
28、本发明还提供一种激光雷达的反馈控制方法,包括如下步骤:
29、利用耦合器阵列接收待测物反射的回波信号,并将所述回波信号作为信号光耦合至接收芯片内的各路光波导中;
30、利用相移器组调节各路本振光的相位,为各路拍频电流信号引入相移,其中,所述拍频电流信号是由本振光与信号光混频后再转换为电流信号并做差得到的;
31、将各路拍频电流信号合束为总拍频信号it;
32、获取所述总拍频信号,并根据所述总拍频信号的幅度值调节施加在所述相移器组内各相移器上的电压,以改变各路本振光的相位,直至所述总拍频信号it的电流值达到最大。
33、进一步的,所述的一种激光雷达的反馈控制方法,还包括:
34、将输入至接收芯片上的本振光分为n路本振光;
35、将所述耦合器阵列输出的各路信号光,与所述相移器组调节后的各路本振光进行混频,并输出两路光信号;
36、将两路光信号转换为电流信号并做差,以得到各路拍频电流信号,所述拍频电流信号ii的表达式如下:
37、
38、ii为第i路拍频电流信号;ai为第i路拍频电流信号的振幅;f为回波信号与本振光的频率差;为第i路拍频电流信号的初始相位;i=1,2,3…n,n为所述耦合器阵列耦合至接收芯片内的信号光的路数;是第i路相移器引入的相移。
39、进一步的,所述调节施加在所述相移器组内各相移器上的电压的过程包括:
40、实时获取总拍频信号it的电流值;
41、依次调节施加在各相移器上的电压vi,以控制相移器进行步进;
42、当前相移器完成步进后,判断总拍频信号it是否增大,若增大则判定下次步进方向为维持当前步进方向,否则改变当前步进方向;
43、其中,vi为施加在第i路相移器上的电压值,i=1,2,3…n,n为所述耦合器阵列耦合至接收芯片内的信号光的路数;
44、其中,调节vi的方式为,按照步进方向在当前vi基础上增加δv或减小δv,δv是电压调节的最小步进幅度,所述步进方向包括正向步进与负向步进,进行正向步进是指在当前vi基础上增加δv,进行负向步进是指在当前vi基础上减小δv。
45、本发明所带来的有益效果:
46、1.实现对存在滞后角的回波信号进行有效接收,并保证较高的耦合效率,同时实时的对各路信号进行调控,确保接收芯片输出的电信号强度始终在较高水平,以解决滞后角引起的相干效率下降的问题,以及现有技术中多光路合束存在效率低且不稳定的问题;
47、2.本发明将用于实现光束接收,光信号混频,电信号合束等重要功能器件集成在单个硅基芯片上,具有高集成度、性能稳定的优势,且成本可控;
48、3.本发明中接收芯片上的光路设计成熟,工艺稳定,且具有可扩展性,可以根据实际应用场景中滞后角的具体大小合理设置耦合器的数量与芯片尺寸,从而适应不同的激光雷达接收场景;
49、4.反馈控制方式对调制速率要求低,配合接收芯片上的相移器,实现精准高效的反馈控制功能。
- 还没有人留言评论。精彩留言会获得点赞!