基于模式识别和浓度模拟耦合的恶臭异味走航监测方法与流程
本发明提供一种基于模式识别和浓度模拟耦合的恶臭异味走航监测方法,属于环境监测。
背景技术:
1、恶臭是指一切刺激嗅觉器官引起人们不愉快感觉及损害生活环境的异味气体。恶臭/异味污染属于典型扰民污染,既影响居民生活质量和环境舒适度,同时对生理健康也有直接危害。近年来,居民投诉十分强烈,日益成为一个严重的社会民生问题。
2、恶臭异味来源广泛、组成物质复杂、环境浓度低,其排放和扩散具有阵发性、瞬时性特点,目前恶臭异味监管通常采用人工现场检查、人工采样离线测试的方式,不仅时间和人力成本较高,且难以及时地、全面地获取恶臭异味信息,无法快速准确进行污染来源识别和成因诊断,难以满足现有环境管理的需求。随着vocs走航监测技术的发展,走航监测已经成为区域大气污染监测、排查、溯源、评价的重要手段。
3、通过感官分析法测定的臭气浓度是目前国内外恶臭监测、执法、评价最重要的指标,该指标能够全面地反映恶臭气体对人体的感官影响,由于其是一种综合感官指标,标准方法是通过人工嗅辨的方式进行测定(hj1262-2022、en13725:2003、astme544-10等),但该方法无法实现现场、连续和在线监测,更无法应用在恶臭异味走航监测工作中。
4、随着传感器技术的发展,恶臭电子鼻(也称为恶臭在线监测仪器)通过传感器阵列模拟人类嗅觉感官能够对臭气浓度进行模拟,但由于恶臭气体组分复杂,不同恶臭气体电子鼻的传感器响应有较大差异,因此目前国内外电子鼻研究主要在对垃圾、污水等特定行业的恶臭气体进行臭气浓度模拟,形成针对行业排放特征的臭气浓度模拟模型。因此应用在区域恶臭异味走航监测时,尤其是工业园区、产业集群等恶臭来源众多的区域,由于环境中恶臭气体组分会随着时间、地点、气象条件发生变化,一般的恶臭电子鼻在复杂环境中走航时只能通过基于特定行业排放特征和气体样品建立的模型模拟臭气浓度,监测数据与实际环境中臭气浓度相差较大。
5、一般的恶臭电子鼻主要是通过利用垃圾、污水等特定行业的恶臭气体,通过拟合或训练建立臭气浓度模拟定量模型,形成针对行业排放特征的臭气浓度模拟模型,内置在恶臭电子鼻中,通过基于特定行业排放特征和气体样品建立的模型模拟臭气浓度,将响应信号转化为臭气浓度监测值。所以当恶臭电子鼻进行走航时,通常通过经验判断选择跟区域内恶臭异味特征相对最为接近的模型进行臭气浓度模拟,利用模拟结果作为监测数据。该技术存在以下技术缺点:
6、(1)一般的恶臭电子鼻通过基于特定行业排放特征和气体样品建立的模型模拟臭气浓度,而在区域恶臭异味走航监测时,尤其是工业园区、产业集群等恶臭来源众多的区域,由于环境中恶臭气体组分会随着时间、地点、气象条件发生变化,因此用一般恶臭电子鼻进行走航时,经常由于内置的臭气浓度模拟定量模型与恶臭气体组分不匹配,造成监测数据与实际环境中臭气浓度相差较大。
7、(2)模式识别通过提取不同传感器响应信号特征值,利用机器学习或深度学习方法,对不同种类样品或行业进行判别或分类,但由于传感器响应信号不仅与样品的组分有关,也与样品的浓度有关,因此当浓度发生变化时不同传感器响应信号特征也会发生变化,即使同一行业,传感器对不同浓度范围恶臭气体的响应信号也有较大差异。一般研究开展模式识别时进行训练的不同种类或行业样品都是在固定的浓度范围内,因此使模式识别建立的分类模型在此固定浓度范围内成功率较高,而对此固定浓度范围外的样品很难保证判别或分类效果。恶臭异味走航监测都是在大气环境中,恶臭气体的浓度范围差异较大,经常出现超过该固定浓度范围的恶臭气体,而扩大浓度范围会使模式识别难度成倍增加、判别成功率降低,很难满足在恶臭异味走航监测过程中准确对行业进行判别的要求。
技术实现思路
1、针对上述技术问题,本发明提供一种基于模式识别和浓度模拟耦合的恶臭异味走航监测方法,达到以下目的:
2、(1)本发明解决了恶臭走航监测时利用仪器监测臭气浓度准确性低的问题,提高了恶臭异味走航监测的实际效果。通过模式识别和浓度模拟耦合的方式,通过模式识别对环境中恶臭异味来源进行初步筛选,根据模式识别的恶臭行业自动选择对应的臭气浓度模拟定量模型,当环境中恶臭气体组分发生变化时通过模式识别判断并重新选择对应的模型,形成半自适应的、定性定量耦合的恶臭异味走航监测方法,从而提高恶臭异味走航监测时利用仪器监测臭气浓度的准确性。
3、(2)本发明根据恶臭气体与传感器响应关系的特点,建立了分臭气强度进行模式识别训练的方法,提高了利用模式识别方法判别行业的准确性,使其满足在恶臭异味走航监测过程中准确对行业进行判别的要求。
4、具体的技术方案为:
5、基于模式识别和浓度模拟耦合的恶臭异味走航监测方法,利用模式识别和浓度模拟耦合的方式开展恶臭异味走航监测,通过模式识别对环境中恶臭异味来源进行初步筛选,根据模式识别的恶臭行业自动选择对应的臭气浓度模拟定量模型,当环境中恶臭气体组分发生变化时通过模式识别判断并重新选择对应的模型。
6、具体包括以下步骤:
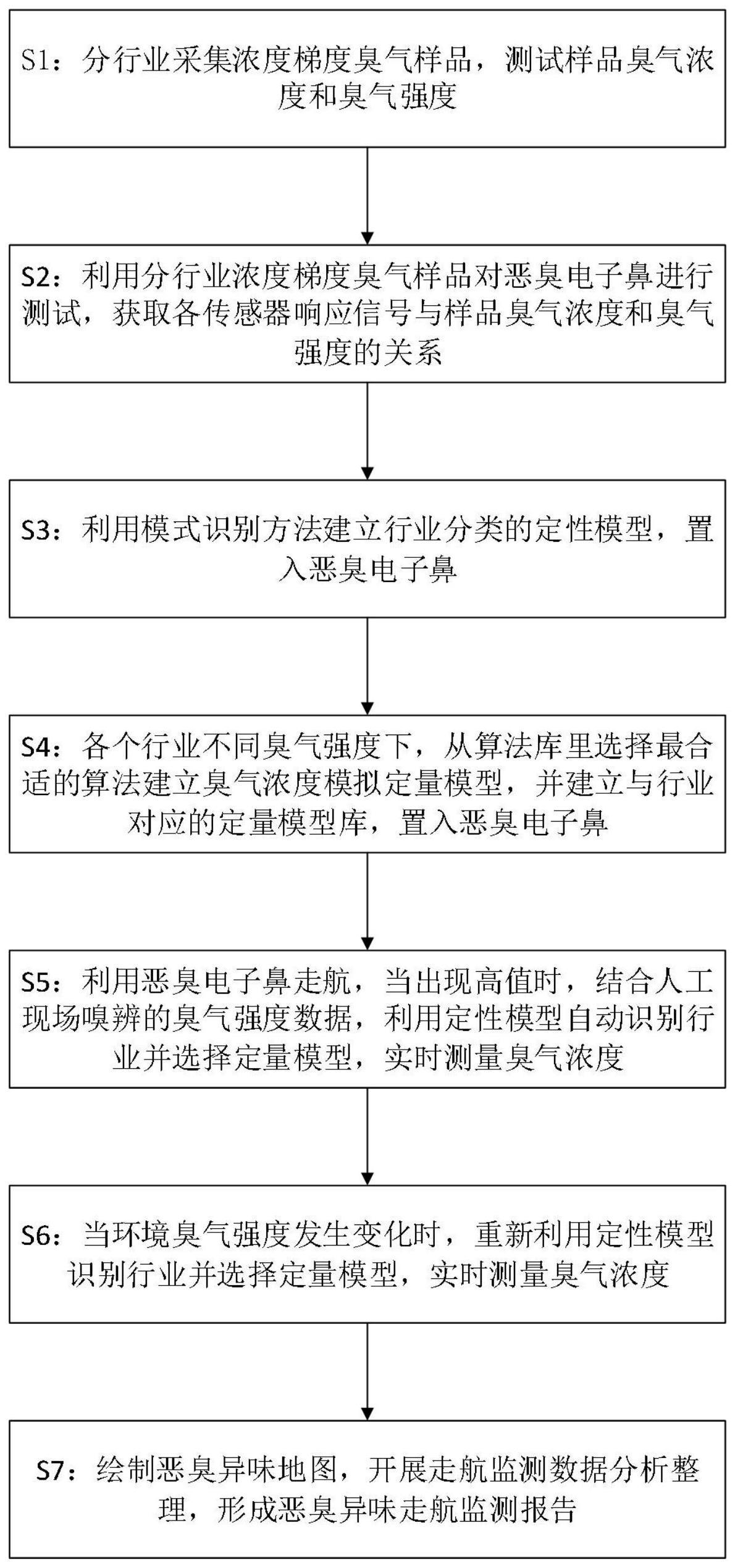
7、s1:分行业采集浓度梯度臭气样品,测试样品臭气浓度和臭气强度。
8、分行业采集其典型工艺环节排放的高浓度臭气样品,典型工艺环节包括有组织、无组织环节,通过稀释样品建立覆盖臭气强度0-5级的浓度梯度样品库,其中每一个行业(本发明中tc表示)在各臭气强度对应的浓度梯度样品最少为6份,其中三分之二用于定性模型和定量模型的训练,三分之一用于定性模型和定量模型的的验证。
9、样品的臭气浓度和臭气强度均利用嗅辨员进行测量;
10、s2:利用分行业浓度梯度臭气样品对恶臭电子鼻进行测试,通过特征提取获取各传感器响应信号与样品臭气浓度和臭气强度的关系。
11、将分行业的浓度梯度臭气样品从低浓度到高浓度依次通入恶臭电子鼻进行测试,根据恶臭电子鼻的响应速度,当恶臭电子鼻响应信号进入稳定阶段后,提取各传感器的响应信号作为特征值其中n为传感器编号,i为对应的行业,j为对应的臭气强度,并记录在传感器响应信号与臭气浓度、强度关系表中,其中用三分之二的浓度梯度样品库测试的数据作为训练数据库,用三分之一的浓度梯度样品库测试的数据作为验证数据库。
12、s3:利用模式识别方法建立行业分类的定性模型,置入恶臭电子鼻。
13、利用支持向量机算法svm作为模式识别的算法,使用训练数据库中数据训练行业分类的定性模型,核函数选择高斯核函数,即:
14、
15、其中分别是第i1和i2个行业在臭气强度j1级和j2级下的特征向量,i1和i2可以为同一个行业,j1和j2必须是不同的臭气强度,σ是高斯核函数参数用于控制映射后的距离。
16、特征向量为其中为在臭气强度j下的行业i,为s2步骤获取的第n号传感器在行业i的臭气强度为j的样品的传感器响应信号特征值。
17、对定性模型进行验证,利用验证数据库的数据代入定性模型,比较定性模型识别的行业判别结果是否与实际的行业对应,利用如下公式验证判别成功率,如果判别成功率≥95%说明定性模型能够区分大部分行业,继续下一步骤,如果判别成功率<95%则调整高斯核函数参数σ或采集更多样品进行训练,直至判别成功率≥95%为止。
18、
19、其中rs为行业判别成功率,ns为成功判别的数量,nt为验证数据总量。
20、s4:各个行业不同臭气强度下,从模拟定量算法库里选择最合适的算法建立臭气浓度模拟定量模型,并建立与行业对应的定量模型库,置入恶臭电子鼻。
21、使用偏最小二乘回归算法(plsr)、支持向量回归算法(svr)、人工神经网络算法(ann)作为臭气浓度模拟定量算法库,利用训练数据库按照不同行业臭气强度为1-5级的数据对算法分别进行训练,利用验证数据库对效果进行评估,根据评估结果选择均方根误差(rmse)最小的最优算法作为该行业在该臭气强度下的臭气浓度模拟定量算法。
22、均方根误差(rmse)计算公式如下:
23、
24、其中rmsei,j为第i个行业第j个臭气强度的模型的均方根误差,n为验证样本量,xk为第k个样本的模拟臭气浓度,yk为第k个样本的实测臭气浓度。
25、臭气强度为0级的恶臭气体由于浓度较低,不同行业差异较小,因此臭气强度0级的定量模型将在训练数据库中选择所有臭气强度为0级的数据一起进行训练,并利用验证数据库中所有臭气强度为0级的数据一起进行验证,选择均方根误差(rmse)最小的最优算法作为臭气强度0级的臭气浓度模拟定量算法。
26、通过训练、验证获得所有行业在不同臭气强度的最优的臭气浓度模拟定量模型,建立与行业对应的定量模型库。
27、s5:利用恶臭电子鼻走航,当出现高值时,结合人工现场嗅辨的臭气强度数据,利用定性模型自动识别行业并选择定量模型,实时测定臭气浓度。
28、s5包括如下步骤:
29、(1)通过资料收集、投诉分析,掌握区域企业数量和分布情况,确定走航监测范围、走航时段、走航路线,选择在恶臭异味投诉的相对集中时间与相同风向下开展异味走航监测。
30、(2)通过资料调研了解走航监测区域内企业所属行业,筛选区域内涉及恶臭异味的行业,并在恶臭电子鼻或走航监测系统中选择上述行业,如在走航监测系统选择则由该系统向恶臭电子鼻发送选择行业。
31、(3)按照规划路线同步开展现场嗅辨和连续监测,现场嗅辨利用嗅辨员实时测定大气环境的臭气强度,连续监测利用恶臭电子鼻实时测定臭气浓度。
32、(4)当出现臭气高值时,通常是臭气强度大于等于2级时,嗅辨员将臭气强度输入恶臭电子鼻或走航监测平台,如输入走航监测系统则由该系统向恶臭电子鼻发送实时臭气强度数据,恶臭电子鼻根据臭气强度数据利用定性模型识别行业,并选择对应该行业该臭气强度的定量模型测定臭气浓度。
33、(5)如环境臭气强度无变化,则利用该定量模型自动连续监测大气环境的臭气浓度,在恶臭电子鼻上显示并上传至走航监测系统,实现臭气浓度的自动连续监测。
34、s6:当环境臭气强度发生变化时,重新利用定性模型识别行业并选择定量模型,实时监测臭气浓度。
35、当环境臭气强度发生变化时,嗅辨员将新的臭气强度输入恶臭电子鼻或走航监测平台,重复s4的步骤(4)利用定性模型识别行业,如果行业发生变化则重新选择定量模型,并继续s4的步骤(5)自动连续监测大气环境臭气浓度。
36、s7:绘制恶臭异味地图,开展走航监测数据分析整理,形成恶臭异味走航监测报告。
37、当走航监测结束后开展报告编制工作,步骤如下:
38、(1)绘制能反映走航路线、臭气浓度实时监测结果、位置等信息的恶臭异味地图,异味地图需要将不同走航点位的臭气浓度在地图上进行可视化显示,可视化显示方式包括利用臭气浓度高低由颜色进行区分、由柱状图高度进行区分、由颜色和柱状图高度共同进行区分。
39、(2)分析走航监测数据,结合恶臭异味地图和嗅辨员现场嗅辨结果,编写恶臭异味事件列表,包括臭气高值编号(需在恶臭异味地图上标注)、附近企业名称、臭气浓度、臭气强度、气味特点及发生频率(包括频发、阵发、偶发),臭气强度、气味特点及发生频率由嗅辨员现场判断并记录,臭气浓度为恶臭电子鼻监测的数据。
40、(3)对恶臭异味走航监测区域的整体情况、特点进行分析和描述。
41、(4)将以上工作内容整合,形成恶臭异味走航监测报告。
42、本发明技术方案带来的技术效果:
43、(1)本发明通过模式识别和浓度模拟耦合技术,形成半自适应的、定性定量耦合的恶臭异味走航监测方法,解决了恶臭异味走航监测时由于环境恶臭气体组分发生变化导致的利用仪器监测臭气浓度准确性低的问题,提高了恶臭异味走航监测的实际效果。
44、(2)本发明根据恶臭气体与传感器响应关系的特点,建立了分臭气强度进行模式识别训练的方法,提高了利用模式识别方法判别行业的准确性,使其满足在恶臭异味走航监测过程中准确对行业进行判别的要求。
- 还没有人留言评论。精彩留言会获得点赞!