过滤玻璃噪点的方法、激光雷达及机器人与流程
本申请实施例涉及机器人,尤其涉及一种过滤玻璃噪点的方法、激光雷达及机器人。
背景技术:
1、随着科技的不断发展,激光雷达广泛应用于机器人、无人驾驶、无人车等领域。激光雷达(laser detection and ranging,ladar)是以发射激光光束来探测目标的位置、速度等特征量的雷达系统。激光雷达包括发射器和接收器,发射器向目标发射探测信号(激光),接收器接收从目标反射回来的信号(反射光),然后,激光雷达将接收到的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,例如目标距离、方位、高度、速度、姿态、甚至形状等参数。
2、其中,激光雷达采用的测距方法有三角测距法和tof法(time of flight,tof)。在三角测距法中,激光雷达发射激光打在物体上发生反射,反射光线被接收器接收,在接收器上形成光斑,提取光斑的质心得到激光点。随着激光点的不断产生,生成点云数据。然而,激光打在多层玻璃上经过多次反射及受到了阳光、玻璃上灰尘等的影响会对光斑质心提取带来很大的不确定性。对于玻璃等物体,扫描生成的点云数据中会存在大量的噪点(即玻璃噪点),对室内的slam建图定位造成干扰。
技术实现思路
1、有鉴于此,本申请一些实施例提供了一种过滤玻璃噪点的方法、激光雷达及机器人,该方法应用于激光雷达,激光雷达能够准确过滤掉点云数据中的玻璃噪点,减少噪点干扰,有利于机器人建图和避障的准确性。
2、第一方面,本申请实施例提供了一种过滤玻璃噪点的方法,包括:
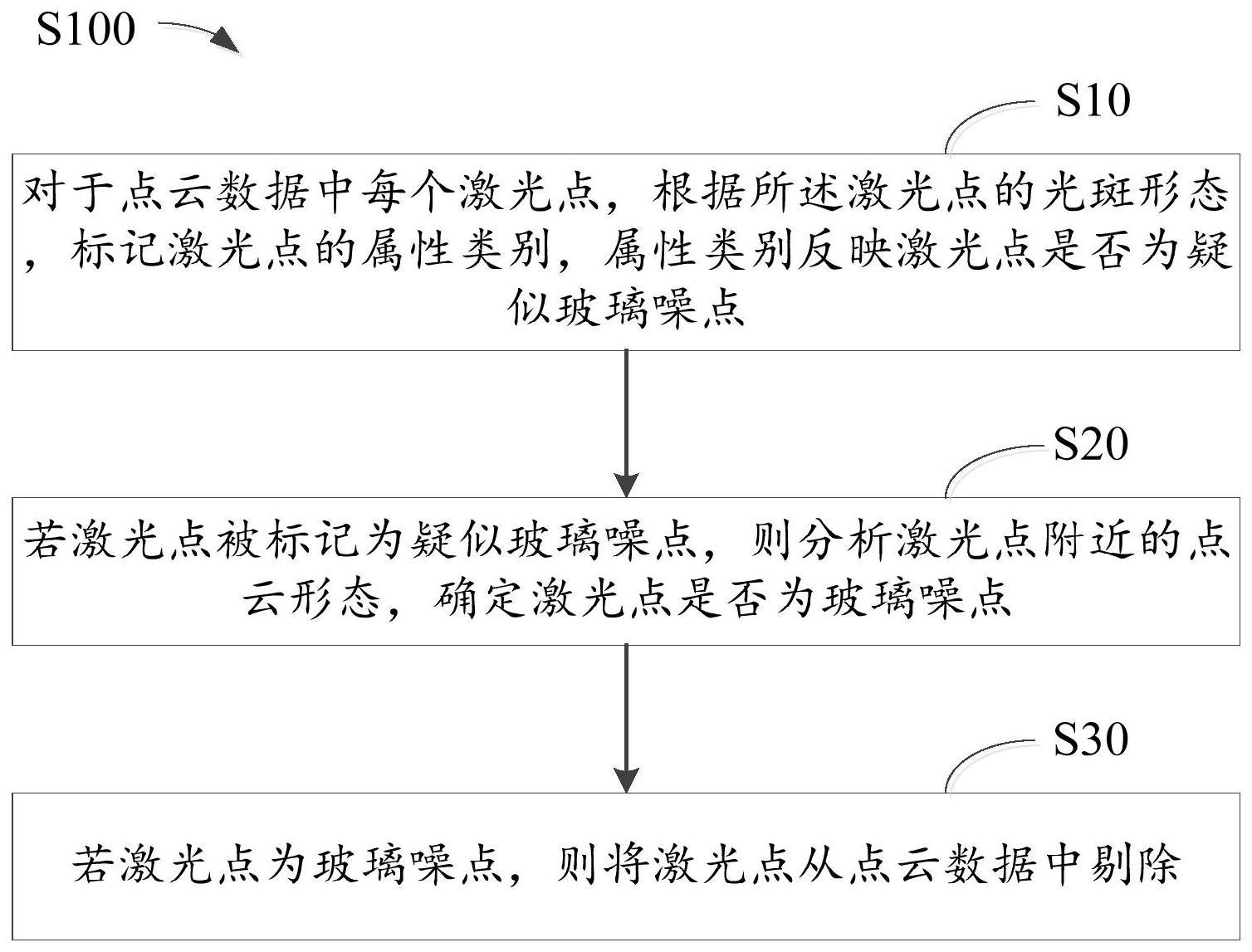
3、对于点云数据中每个激光点,根据激光点的光斑形态,标记激光点的属性类别,属性类别反映激光点是否为疑似玻璃噪点;
4、若激光点被标记为疑似玻璃噪点,则分析激光点附近的点云形态,确定激光点是否为玻璃噪点;
5、若激光点为玻璃噪点,则将激光点从点云数据中剔除。
6、在一些实施例中,前述根据激光点的光斑形态,标记激光点的属性类别,包括:
7、对激光点的光斑进行灰度统计,得到光斑曲线;
8、确定光斑曲线中的光斑有效区域;
9、根据光斑有效区域中曲线的波形特征,标记激光点的属性类别。
10、在一些实施例中,前述根据光斑有效区域中曲线的波形特征,标记激光点的属性类别,包括:
11、分别统计光斑有效区域两侧的外灰度值大于第一灰度阈值的像素个数,得到左侧像素个数和右侧像素个数;
12、分别确定光斑有效区域的两侧是否出现梯度方向变化,得到左侧梯度方向变化结果和右侧梯度方向变化结果;
13、根据左侧像素个数、右侧像素个数以及左侧梯度方向变化结果、右侧梯度方向变化结果,标记激光点的属性类别。
14、在一些实施例中,前述根据左侧像素个数、右侧像素个数以及左侧梯度方向变化结果、右侧梯度方向变化结果,标记激光点的属性类别,包括:
15、若左侧梯度方向发生改变且左侧像素个数大于第一阈值,则确定左侧属性类别为疑似玻璃噪点;
16、若右侧梯度方向发生改变且右侧像素个数大于第二阈值,则确定右侧属性类别为疑似玻璃噪点;
17、在左侧属性类别为疑似玻璃噪点和右侧属性类别为疑似玻璃噪点的情况下,标记激光点的属性类别为疑似玻璃噪点。
18、在一些实施例中,前述根据光斑有效区域中曲线的波形特征,标记激光点的属性类别,包括:
19、分别统计光斑有效区域中灰度值大于第二灰度阈值的像素个数,得到区域像素个数;
20、根据区域像素个数,标记激光点的属性类别;或,
21、根据光斑有效区域的宽,标记激光点的属性类别。
22、在一些实施例中,根据光斑有效区域中曲线的波形特征,标记激光点的属性类别,包括:
23、若光斑有效区域中曲线的波峰数量大于或等于第三阈值,则标记激光点的属性类别为疑似玻璃噪点。
24、在一些实施例中,前述分析激光点附近的点云形态,确定激光点是否为玻璃噪点,包括:
25、预设长度的滑动窗口在点云数据上滑动,当激光点位于滑动窗口的中间位置时,根据滑动窗口中激光点的平均距离和/或滑动窗口中有效激光点,确定激光点是否为玻璃噪点。
26、在一些实施例中,前述根据滑动窗口中激光点的平均距离和/或滑动窗口中有效激光点,确定激光点是否为玻璃噪点,包括:
27、确定激光点和滑动窗口中有效激光点的平均距离;
28、若平均距离大于距离阈值,则确定激光点为玻璃噪点;或,
29、若滑动窗口中有效激光点的数量小于数量阈值,则确定激光点为玻璃噪点。
30、第二方面,本申请实施例提供了一种激光雷达,包括:
31、至少一个处理器,以及
32、与至少一个处理器通信连接的存储器,其中,
33、存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行第一方面的方法。
34、第三方面,本申请实施例提供了一种机器人,包括第二方面的激光雷达。
35、本申请实施例的有益效果:区别于现有技术的情况,本申请实施例提供的过滤玻璃噪点的方法,对于点云数据中每个激光点,根据激光点的光斑形态,标记激光点的属性类别,属性类别反映激光点是否为疑似玻璃噪点。若激光点被标记为疑似玻璃噪点,则分析激光点附近的点云形态,确定该激光点是否为玻璃噪点。若激光点为玻璃噪点,则将激光点从点云数据中剔除。
36、在此实施例中,分两步筛选出玻璃噪点,首先根据光斑形态,标记出疑似玻璃噪点的激光点。然后,对于疑似玻璃噪点的激光点,进一步分析其附近的点云形态,确定其是否为玻璃噪点。筛选出玻璃噪点后,将玻璃噪点激光点从点云数据中剔除。也即,根据光斑形态进行粗筛,能够快速标记出疑似玻璃噪点,对于疑似玻璃噪点,根据附近的点云形态进行细筛,能够准确确定其是否为玻璃噪点。相比于对点云数据中所有激光点云进行粗筛或细筛,本申请实施例中结合光斑形态和点云形态分两步筛选的方式,不仅能准确过滤玻璃噪点,而且能够有效节省算力,从而,该方法能够应用于算力低的器件(例如单片机等),有利于在激光雷达上实施,使得激光雷达最终输出的点云数据准确,减少了噪点干扰,有利于机器人建图和避障的准确性。
技术特征:
1.一种过滤玻璃噪点的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述激光点的光斑形态,标记所述激光点的属性类别,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述光斑有效区域中曲线的波形特征,标记所述激光点的属性类别,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述左侧像素个数、所述右侧像素个数以及所述左侧梯度方向变化结果、所述右侧梯度方向变化结果,标记所述激光点的属性类别,包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述光斑有效区域中曲线的波形特征,标记所述激光点的属性类别,包括:
6.根据权利要求2所述的方法,其特征在于,所述根据所述光斑有效区域中曲线的波形特征,标记所述激光点的属性类别,包括:
7.根据权利要求1所述的方法,其特征在于,所述分析所述激光点附近的点云形态,确定所述激光点是否为玻璃噪点,包括:
8.根据权利要求7所述的方法,其特征在于,所述根据所述滑动窗口中激光点的平均距离和/或所述滑动窗口中有效激光点,确定所述激光点是否为玻璃噪点,包括:
9.一种激光雷达,其特征在于,包括:
10.一种机器人,其特征在于,包括如权利要求9所述的激光雷达。
技术总结
本申请实施例涉及机器人技术领域,公开了一种过滤玻璃噪点的方法,对于点云数据中每个激光点,根据激光点的光斑形态,标记激光点的属性类别,属性类别反映激光点是否为疑似玻璃噪点。若激光点被标记为疑似玻璃噪点,则分析激光点附近的点云形态,确定该激光点是否为玻璃噪点。若激光点为玻璃噪点,则将激光点从点云数据中剔除。在此实施例中结合光斑形态和点云形态分两步筛选的方式,不仅能准确过滤玻璃噪点,而且能够有效节省算力,从而,该方法能够应用于算力低的器件(例如单片机等),有利于在激光雷达上实施,使得激光雷达最终输出的点云数据准确,减少了噪点干扰,有利于机器人建图和避障的准确性。
技术研发人员:何昌传,陈悦
受保护的技术使用者:深圳市欢创科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!