构建场景还原数据的方法、装置、车辆及存储介质与流程
本技术涉及车辆,具体涉及一种构建场景还原数据的方法、装置、车辆及存储介质。
背景技术:
1、高精地图也称自动驾驶地图、高分辨率地图,是一种面向自动驾驶汽车的新的地图数据范式。它一般由含有语义信息的车道模型、道路部件、道路属性三类矢量信息,以及用于多传感器定位的特征图层构成。
2、在自动驾驶汽车上一般基于高精地图进行行车场景还原,从而实现行车预测,完成自动驾驶。但是,目前高精地图的覆盖区域不广泛,其覆盖区域有限制,对未覆盖的区域无法进行相关场景还原,体验较差。
技术实现思路
1、本技术的目的之一在于提供一种构建场景还原数据的方法,其可以得到可靠性更好、丰富度更高且覆盖区域更广泛的场景还原数据;本技术的目的之二在于提供一种行车预测方法;本技术的目的之三在于提供一种构建场景还原数据的装置;本技术的目的之四在于提供一种行车预测装置;本技术的目的之五在于提供一种车辆;本技术的目标之六在于提供一种存储介质。
2、为了实现上述目的,第一方面,本技术提供一种构建场景还原数据的方法,所述构建场景还原数据的方法包括:
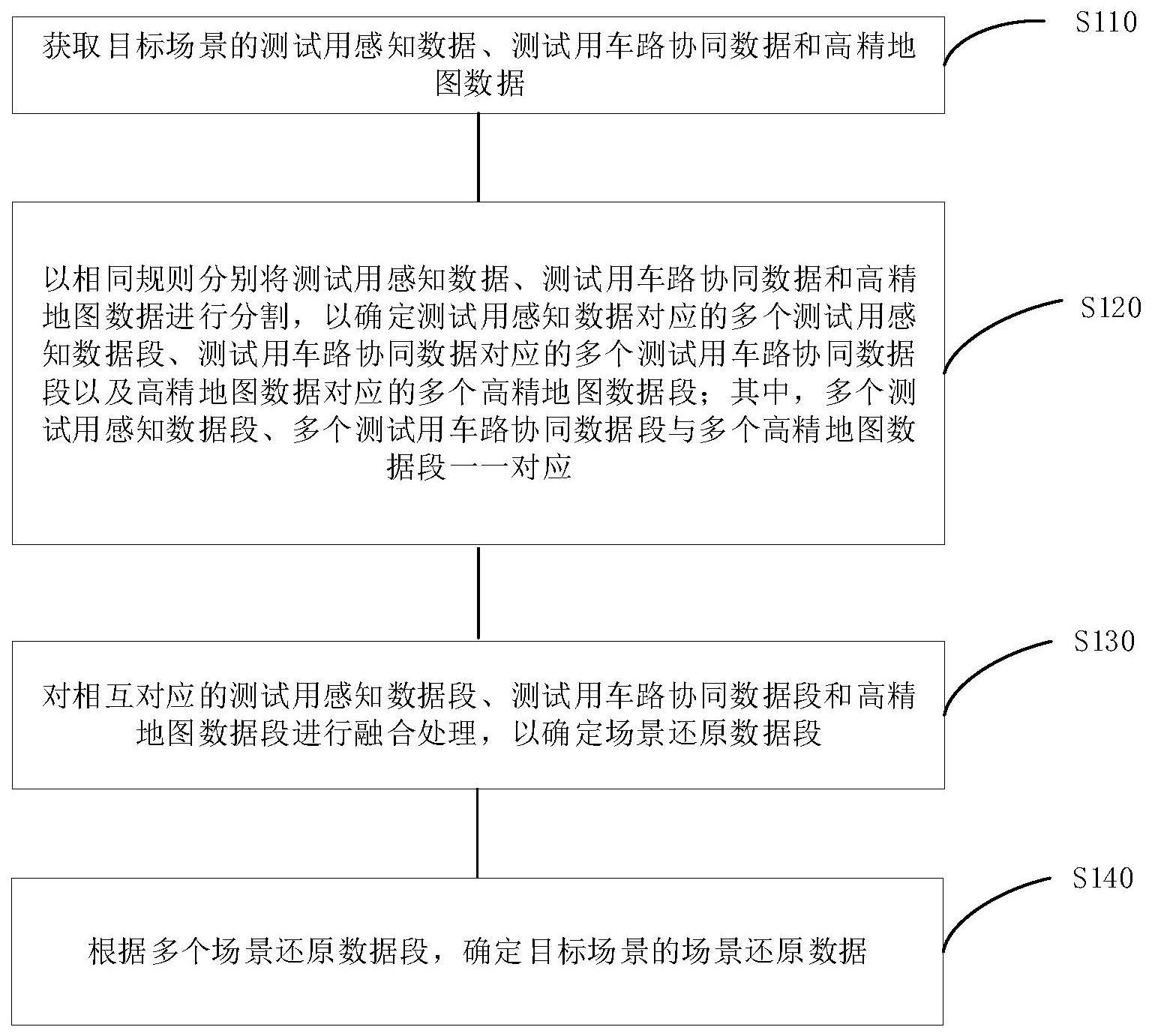
3、获取目标场景的测试用感知数据、测试用车路协同数据和高精地图数据;
4、以相同规则分别将所述测试用感知数据、所述测试用车路协同数据和所述高精地图数据进行分割,以确定所述测试用感知数据对应的多个测试用感知数据段、所述测试用车路协同数据对应的多个测试用车路协同数据段以及所述高精地图数据对应的多个高精地图数据段;其中,多个所述测试用感知数据段、多个所述测试用车路协同数据段与多个所述高精地图数据段一一对应;
5、对相互对应的所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段进行融合处理,以确定场景还原数据段;
6、根据多个所述场景还原数据段,确定所述目标场景的场景还原数据。
7、进一步地,所述对相互对应的所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段进行融合处理,以确定场景还原数据段,包括:
8、分别对所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段中的数据以数据点方式进行成像处理,以确定所述测试用感知数据段对应的感知图像、所述测试用车路协同数据段对应的车路协同图像以及所述高精地图数据段对应的高精地图图像;
9、对所述感知图像、所述车路协同图像和所述高精地图图像进行差异分析;
10、基于差异分析结果,从所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段选取所述场景还原数据段。
11、进一步地,所述基于差异分析结果,从所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段选取所述场景还原数据段,包括以下中的至少一种:
12、对于所述感知图像、所述车路协同图像和所述高精地图图像中,存在相同数据点的第一区域,从所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段中,任一数据段中选取所述第一区域对应的第一区域场景还原数据;
13、对于所述感知图像、所述车路协同图像和所述高精地图图像中,一个图像存在数据点的第二区域,从所述第二区域存在数据点的图像对应的数据段选取所述第二区域对应的第二区域场景还原数据;
14、对于所述感知图像、所述车路协同图像和所述高精地图图像中,两个图像存在数据点且数据点相同的第三区域,从所述两个图像中任一图像对应的数据段选取所述第三区域对应的第三区域场景还原数据;
15、对于所述感知图像、所述车路协同图像和所述高精地图图像中,至少两个图像存在数据点且数据点存在差异的第四区域,从所述至少两个图像对应的数据段中优先级高的数据段选取所述第四区域对应的第四区域场景还原数据。
16、进一步地,所述测试用感知数据段的优先级高于所述测试用车路协同数据段的优先级,所述测试用车路协同数据段的优先级高于所述高精地图数据段的优先级。
17、进一步地,所述以相同规则分别将所述测试用感知数据、所述测试用车路协同数据和所述高精地图数据进行分割,以确定所述测试用感知数据对应的多个测试用感知数据段、所述测试用车路协同数据对应的多个测试用车路协同数据段以及所述高精地图数据对应的多个高精地图数据段,包括:
18、以设定尺寸将所述目标场景对应的位置区域划分为多个子区域;
19、以多个所述子区域分别对所述测试用感知数据、所述测试用车路协同数据和所述高精地图数据进行分割,以确定多个所述测试用感知数据段、多个所述测试用车路协同数据段与多个所述高精地图数据段。
20、进一步地,所述测试用感知数据通过以下方式获取:
21、采集所述目标场景的图像数据;
22、对所述图像数据进行转换处理,确定所述测试用感知数据。
23、为了实现上述目的,第二方面,本技术还提供了一种行车预测方法,所述行车预测方法包括:
24、获取目标场景的原始场景还原数据;其中,所述原始场景还原数据通过如第一方面所述的构建场景还原数据的方法确定;
25、基于所述原始场景还原数据,对所述目标场景下的行驶进行场景预测。
26、进一步地,所述基于所述原始场景还原数据,对所述目标场景下的行驶进行场景预测,包括:
27、获取行车用感知数据和/或行车用车路协同数据;
28、基于所述行车用感知数据和/或所述行车用车路协同数据,以及所述原始场景还原数据,构建目标场景还原数据;
29、基于所述目标场景还原数据,对所述目标场景下的行驶进行场景预测。
30、为实现上述目的,第三方面,本技术还提供一种构建场景还原数据的装置,所述构建场景还原数据的装置包括:
31、第一获取模块,用于获取目标场景的测试用感知数据、测试用车路协同数据和高精地图数据;
32、确定模块,用于以相同规则分别将所述测试用感知数据、所述测试用车路协同数据和所述高精地图数据进行分割,以确定所述测试用感知数据对应的多个测试用感知数据段、所述测试用车路协同数据对应的多个测试用车路协同数据段以及所述高精地图数据对应的多个高精地图数据段;其中,多个所述测试用感知数据段、多个所述测试用车路协同数据段与多个所述高精地图数据段一一对应;
33、还用于对相互对应的所述测试用感知数据段、所述测试用车路协同数据段和所述高精地图数据段进行融合处理,以确定场景还原数据段;
34、还用于根据多个所述场景还原数据段,确定所述目标场景的场景还原数据。
35、为实现上述目的,第四方面,本技术还提供一种行车预测装置,所述行车预测装置包括:
36、第二获取模块,用于获取目标场景的原始场景还原数据;其中,所述原始场景还原数据通过如第一方面任一项所述的构建场景还原数据的方法确定;
37、行车预测模块,用于基于所述原始场景还原数据,对所述目标场景下的行驶进行场景预测。
38、为实现上述目的,第五方面,本技术还提供一种车辆,包括:处理器和存储器,所述处理器用于执行所述存储器中存储的控制程序,以实现:
39、如上述第一方面所述的构建场景还原数据的方法;或者,
40、如上述第二方面所述的行车预测方法。
41、为实现上述目的,第六方面,本技术还提供一种存储介质,该存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现:
42、如上述第一方面所述的构建场景还原数据的方法;或者,
43、如上述第二方面所述的行车预测方法。
44、本技术的有益效果:
45、本技术中,可基于目标场景的测试用感知数据和测试用车路协同数据对高精地图数据进行验证,从而得到三者融合处理后的场景还原数据,使得场景还原数据同时具有上述三种数据的优点,以规避独立使用高精地图数据时的数据丰富度不够的缺陷,使得场景还原数据的可靠性更好、丰富度更高且覆盖区域更广泛,改善还原场景中的数据稳定性、数据准确性和数据的可预测性,提升场景还原的使用体验。
- 还没有人留言评论。精彩留言会获得点赞!