一种水下裂缝声呐图像模拟方法、存储介质及设备
本发明涉及一种水下裂缝声呐图像模拟方法、存储介质及设备,属于声呐图像模拟领域。
背景技术:
1、水下结构物(如大坝、港闸、桥墩等)由于长期暴露在水中,在温度变化和高水压的影响下,会不可避免的出现裂缝,这些裂缝不仅存在于混凝土表面,还会延伸到结构内部,影响结构物的强度和使用寿命。目前针对水下结构物的裂缝检测主要采用人工潜水检查以及水下光学成像检查的方法,然而人工潜水检查成本高、效率低下,且操作人员危险性大,而水下光学成像则存在容易受到水下环境,如水体深度、流速、浑浊度等的影响,造成成像结果不佳的缺陷。
2、声呐技术基于仿生学原理提出,主要应用于水下环境,不同于水上环境中广泛采用的光学成像,它利用声波在水中传播并接受回波的原理探测目标物体的位置和形状,并经过一系列的数据处理进一步生成可视化的声呐图像。在水下结构物检测领域中,相比较于人工潜水以及水下光学成像方法,声呐技术具有成本低、效率高、受水下环境影响小等优势,但其目前的应用主要针对水下地形测量、整体结构变形检测等大范围场景,对于结构物细部病害(如混凝土裂缝)的检测评估却少有开展。究其原因,主要为现有可供研究的裂缝声呐数据极为有限,而混凝土裂缝形态又具有随机性,缺乏各种形态水下裂缝在声呐系统中的典型表达。
技术实现思路
1、本发明提供了一种水下裂缝声呐图像模拟方法、存储介质及设备,解决了背景技术中披露的问题。
2、为了解决上述技术问题,本发明所采用的技术方案是:
3、一种水下裂缝声呐图像模拟方法,包括:
4、根据光学裂缝数据集,模拟出不同模拟参数下的裂缝声呐图像;
5、其中,每次模拟裂缝声呐图像的过程为:
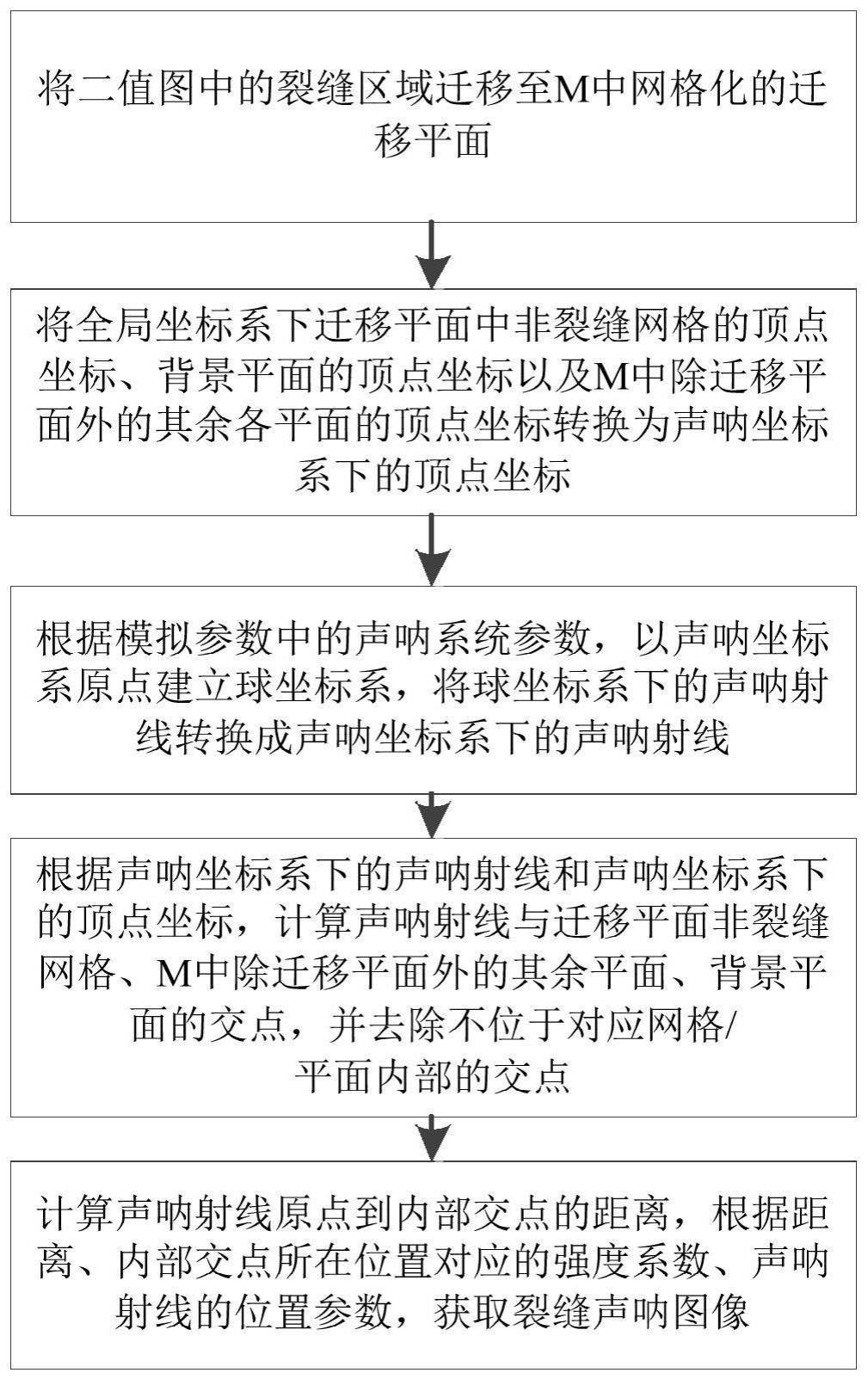
6、将二值图中的裂缝区域迁移至m中网格化的迁移平面;其中,二值图为光学裂缝数据集中的二值图;m为全局坐标系下声呐系统中观测的目标模型,迁移平面为m的顶面;
7、将全局坐标系下迁移平面中非裂缝网格的顶点坐标、背景平面的顶点坐标以及m中除迁移平面外的其余各平面的顶点坐标转换为声呐坐标系下的顶点坐标;其中,背景平面为代表河/海床的平面;
8、根据模拟参数中的声呐系统参数,以声呐坐标系原点建立球坐标系,将球坐标系下的声呐射线转换成声呐坐标系下的声呐射线;
9、根据声呐坐标系下的声呐射线和声呐坐标系下的顶点坐标,计算声呐射线与迁移平面非裂缝网格、m中除迁移平面外的其余平面、背景平面的交点,并去除不位于对应网格/平面内部的交点;
10、计算声呐射线原点到内部交点的距离,根据距离、内部交点所在位置对应的强度系数、声呐射线的位置参数,获取裂缝声呐图像;其中,内部交点为位于对应网格/平面内部的交点。
11、模拟参数中还包括缩放系数;
12、将二值图中的裂缝区域迁移至m中网格化的迁移平面,包括:
13、将二值图中的裂缝区域按缩放系数进行缩放,并计算缩放后裂缝区域各像素点的像素值;
14、根据缩放后裂缝区域各像素点的像素值,将缩放后的裂缝区域迁移至m中网格化的迁移平面。
15、计算缩放后裂缝区域各像素点的像素值,公式为:
16、p(u,v)=w11×f(uo1,vo1)+w12×f(uo1,vo2)+w21×f(uo2,vo1)+w22×f(uo2,vo2)
17、式中,p(u,v)为缩放后裂缝区域中像素点(u,v)的像素值,像素点(u,v)表示坐标为(u,v)的像素点,(uo,vo)=(u/s,v/s),像素点(uo,vo)为原始裂缝区域中与像素点(u,v)对应像素点,像素点(uo,vo)表示坐标为(uo,vo)的像素点,(uo,vo)为浮点数坐标,为缩放系数,l为缩放后裂缝区域长边在m中的长度,lc、wc分别为原始裂缝区域横向和纵向的像素点数量,δx为迁移平面网格化后单个网格横向的长度,f(uo1,vo1)、f(uo1,vo2)、f(uo2,vo1)、f(uo2,vo2)分别为原始裂缝区域中像素点(uo1,vo1)、(uo1,vo2)、(uo2,vo1)、(uo2,vo2)的像素值,像素点(uo1,vo1)、(uo1,vo2)、(uo2,vo1)、(uo2,vo2)分别表示坐标为(uo1,vo1)、(uo1,vo2)、(uo2,vo1)、(uo2,vo2)的像素点,像素点(uo1,vo1)、(uo1,vo2)、(uo2,vo1)、(uo2,vo2)为像素点(uo,vo)相邻的四个像素点,w11、w12、w21、w22分别为f(uo1,vo1)、f(uo1,vo2)、f(uo2,vo1)、f(uo2,vo2)的权重,w11=[1-(u0-u01)]·[1-(v0-v01)],w12=[1-(u0-u01)]·(v0-v01),w21=(u0-u01)·[1-(v0-v01)],w22=(u0-u01)·(v0-v01)。
18、在迁移时,每个像素点对应一个网格,若缩放后裂缝区域像素点的像素值不为0,则表明该像素点为裂缝,否则表明该像素点不为裂缝。
19、计算声呐射线原点到内部交点的距离,公式为:
20、
21、式中,d为声呐射线原点到内部交点pci的距离,为声呐坐标系下向量的方向向量,为声呐坐标系下网格/平面的法向量,o为声呐射线原点,分别为声呐坐标系下声呐原点至内部交点pci、网格/平面某一顶点p1所形成的向量。
22、若声呐射线的内部交点有多个,选用距离最小值,获取裂缝声呐图像。
23、根据距离、内部交点所在位置对应的强度系数、声呐射线的位置参数,获取裂缝声呐图像,包括:
24、根据距离、内部交点所在位置对应的强度系数、声呐射线的位置参数,生成绘图数据(i,j,d,i);其中,i表示声呐射线在θ角方向的位置索引,j表示声呐射线φ角方向的位置索引,θ角表示声呐设备的方位角,φ角表示声呐设备的俯仰角,d为声呐射线原点到内部交点的距离,i为内部交点所在位置对应的强度系数;
25、将绘图数据(i,j,d,i)映射至绘图坐标系中位置处的网格,并根据i对网格进行颜色填充,获得裂缝声呐图像;其中,绘图坐标系采用极坐标表示,dmin和dmax分别为声呐设备成像的最小距离和最大距离,nd为绘图坐标系中沿极径方向划分的网格数,floor为取整函数。
26、一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行水下裂缝声呐图像模拟方法。
27、一种计算机设备,包括一个或多个处理器、以及一个或多个存储器,一个或多个程序存储在所述一个或多个存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行水下裂缝声呐图像模拟方法的指令
28、本发明所达到的有益效果:本发明将光学裂缝数据集中二值图的裂缝区域迁移至声呐系统观测目标模型上,基于声呐射线追踪原理获得不同模拟参数下的裂缝声呐图像,为使用声呐设备探测水下裂缝提供典型的声学图谱,解决了目前应用声呐技术检测水下结构裂缝的领域中,缺乏各种形态水下裂缝在声呐图像中的典型表达的问题,为通过声呐图像准确识别水下结构裂缝的后续相关工作提供基础。
- 还没有人留言评论。精彩留言会获得点赞!