一种通过高程约束增强的足绑式惯性行人无缝定位方法与流程
本发明属于室内外定位领域,具体涉及一种通过高程约束增强的足绑式惯性行人无缝定位方法。
背景技术:
1、随着智能手机与可穿戴设备等消费级终端的大量普及,大众用户对准确、连续、可靠的室内外无缝导航定位服务的需求不断增加。尽管在室外环境中通常可以通过全球卫星导航系统(如北斗、gps和glonass等)获得准确的位置信息,但在室内环境及高程方向上,卫星导航无法满足精准定位的需求。而随着微机电系统惯性传感器(mems-imu)技术的廉价、轻便与高效,基于mems-imu的定位服务正在成为研究的热门领域。
2、惯性导航系统是一种无需依赖任何基础设施和历史数据即可获得位置、速度和姿态的自主定位方法,广泛应用于路径规划、紧急救援、军事行动和智慧空间(如机场、火车站和大型购物中心)等基于位置的服务。然而,高度信息观测不足等固有问题,已成为制约行人惯性导航系统应用和发展的障碍之一。高度发散也是基于mems-imu的足绑式惯性行人定位系统在室内外无缝定位中的主要问题,这会使得通常在同一楼层下的平面定位精度良好,而高程定位精度较差。因此,有必要引入额外的观测信息以提升高程方向的估计精度。
技术实现思路
1、为解决上述技术问题,本发明提供一种通过高程约束增强的足绑式惯性行人无缝定位方法,以解决现有技术中的问题,为实现上述发明目的,本发明所采用的技术方案是:
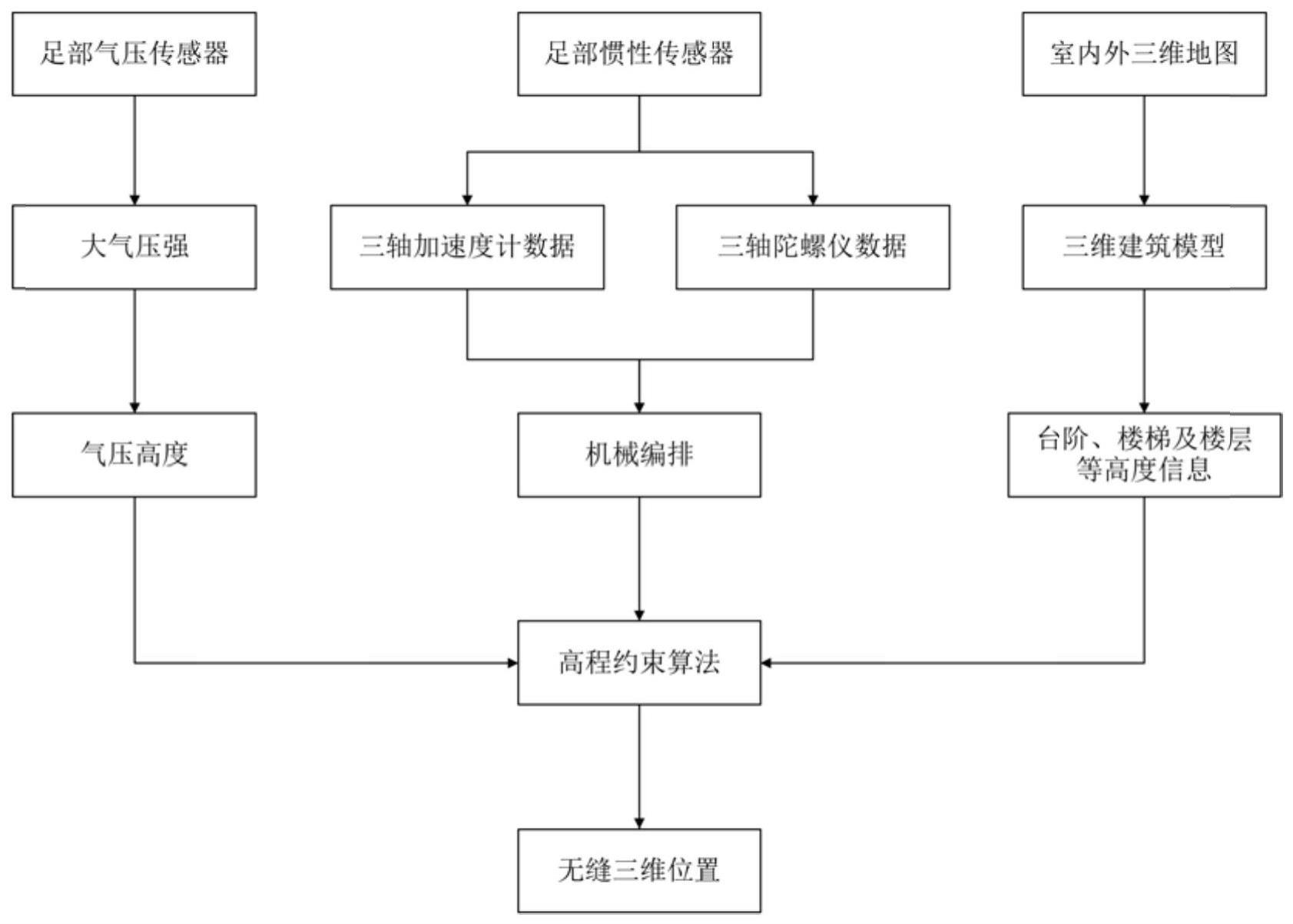
2、一种通过高程约束增强的足绑式惯性行人无缝定位方法,包括如下步骤:
3、s1:采集足部惯性传感器的三轴加速度计和三轴陀螺仪测量数据,并进行机械编排获得行人的位置信息;
4、s2:采集足部气压计传感器测量的大气压强并转换为气压高度后进行高程约束;
5、s3:基于室内外三维地图衍生的台阶、楼梯与楼层信息构造高度约束方程,提高行人高程估计的精度。
6、进一步的,所述步骤s1中,采集仪测量数据时,包括以下方法:
7、设足部惯性传感器输出的加速度计和陀螺仪的在第k时刻的原始数据分别为和则在某个采样点的测量数据可以描述为:
8、
9、其中,k表示第k时刻采样点,xk表示在所观测时刻的足部惯性传感器的六维数据,表示实数域。
10、进一步的,所述步骤s1中,进行机械编排获得行人的位置信息时,采用以下方法:
11、定义b为载体坐标系,n为导航坐标系;
12、构建从b系到n系的旋转矩阵满足
13、
14、其中,so(3)代表三维旋转矩阵的集合,是的转置矩阵,i表示单位矩阵,det是行列式运算;结合足部惯性传感器在k时刻的采样,惯性导航系统在k时刻的输出通过以下机械编排方程进行计算:
15、
16、
17、
18、其中,和分别表示k时刻的旋转矩阵、速度矩阵和位置矩阵,和分别表示k时刻的加速度与角速率,[·]×是向量的斜对称矩阵,dt表示时间的微分,t是采样周期;通过该机械编排方程求解得到行人在第k时刻的位置
19、进一步的,在n系中的加速度通过下式计算:
20、
21、式中,gn为导航坐标系中的重力分量的补偿值。
22、进一步的,采集足部气压计传感器测量的大气压强并转换为气压高度时,包括以下方法:
23、气压计传感器测量的大气压强p与高度h的关系通过下式表示:
24、
25、其中,p0为标准大气压,p为目标位置的大气压力,r是干空气的气体常数,m是干空气的摩尔质量,g是标准重力加速度,t0是以开尔文为单位的目标位置的温度;
26、采用以10为底的对数,公式(6)转换为下式:
27、
28、其中,t是以摄氏度为单位的目标位置的温度。
29、进一步的,进行高程约束时,包括以下方法:
30、通过安装在足部的气压计和惯性导航系统测量的相对高度信息来构建观测模型:
31、
32、其中,代表了相邻两个历元间的气压高度的变化;代表了惯性导航系统的高度变化;
33、如果连续两个步态间的气压高度变化都小于设定的阈值,则认为行人在平坦的地面上行走,并且将设置为零从而减小高度的累积误差。
34、进一步的,包括:
35、设行人在跨越第k级台阶时惯性导航系统积分的高度变化为此时气压计测量的高度变化为
36、如果检测到连续两个步态之间气压高度变化超过阈值时,认为行人处于楼梯场景,进而修正惯性导航系统积分高度为:
37、
38、其中,三维地图中测量获取到的每节台阶和每层楼的高度分别为δhstep和δhfloor;每段楼梯的高度为0.5δhfloor;设置气压计传感器检测阈值为σ=1.5δhstep。
39、本发明具有以下有益效果:
40、(1)、提高行人导航系统的高程定位精度:通过引入气压计和三维地图建筑模型等额外的观测信息,能够增强足绑式惯性行人定位系统对高程方向的估计,实现更准确的高程定位,提升室内外无缝导航服务的精确度;
41、(2)、优化室内外无缝导航服务的轻量化和低功耗特性:通过利用气压计等传感器进行高程估计,能够减少对其他传感器的依赖,实现轻量化和低功耗的导航系统设计,更好地适应移动智能设备的使用需求;
42、(3)、提升行人位置服务的稳定性和可靠性:通过构建基于气压计和三维地图的高程约束模型,能够辅助对行人定位服务进行更加精细的控制和管理,提升导航定位的稳定性和可靠性,为用户提供更加出色的室内外无缝导航体验。
技术特征:
1.一种通过高程约束增强的足绑式惯性行人无缝定位方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的定位方法,其特征在于,所述步骤s1中,采集仪测量数据时,包括以下方法:
3.根据权利要求2所述的定位方法,其特征在于,所述步骤s1中,进行机械编排获得行人的位置信息时,采用以下方法:
4.根据权利要求3所述的定位方法,其特征在于,在n系中的加速度通过下式计算:
5.根据权利要求1所述的定位方法,其特征在于,所述步骤s2中,采集足部气压计传感器测量的大气压强并转换为气压高度时,包括以下方法:
6.根据权利要求5所述的定位方法,其特征在于,所述步骤s2中,进行高程约束时,包括以下方法:
7.根据权利要求6所述的定位方法,其特征在于,所述步骤s3中,包括:设行人在跨越第k级台阶时惯性导航系统积分的高度变化为此时气压计测量的高度变化为
技术总结
本发明公开了一种通过高程约束增强的足绑式惯性行人无缝定位方法,步骤包括:采集足绑式惯性传感器的三轴加速度计和三轴陀螺仪测量数据,并进行机械编排获得行人的位置信息;采集足部气压计传感器测量的大气压强并转换为气压高度后进行高程约束;基于室内外三维地图衍生的台阶、楼梯与楼层信息构造高度约束方程,进一步提高行人的高程估计。本发明通过构建基于气压计和三维建筑模型的高程约束模型,增强了足绑式惯性行人定位系统对高程估计的准确性,实现了轻量化、低功耗、高精度和高稳定的室内外无缝行人定位方法。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京泛源时空科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!