一种基于ARMA等效模型的陀螺仪误差滤波方法
本发明主要针涉及陀螺仪的输出数据处理领域,属于惯性导航
背景技术:
1、陀螺仪是一种用于测量角速度或角位移的传感器。在实际应用中,由于各种噪声和误差的存在,陀螺仪的输出数据往往会存在随机误差,这会对其精度和准确性造成影响。
2、随机误差可以由多种因素引起,例如电子噪声、温度变化、机械振动等。这些随机误差会导致陀螺仪输出的数据出现随机波动,从而使测量结果不具备稳定性和一致性。
3、卡尔曼滤波是应用普遍的陀螺仪随机误差滤波方法之一,是基于状态估计的最优滤波算法,考虑了测量数据的噪声特性和系统模型,能够在一定程度上预测系统状态,并对观测数据进行滤波处理。
4、陀螺仪输出的原始数据,不容易建造数学模型,从而造成了卡尔曼滤波的应用困难,现有的建模手段步骤复杂且条件复杂,对陀螺仪的随机误差滤波造成技术壁垒。
技术实现思路
1、针对现有的技术缺点,本发明提出一种步骤简单的滤波方法,本发明欲解决的问题是:利用allan方差和arma等效原理构建陀螺仪的随机误差数学模型,在结合卡尔曼滤波实现滤波效果。
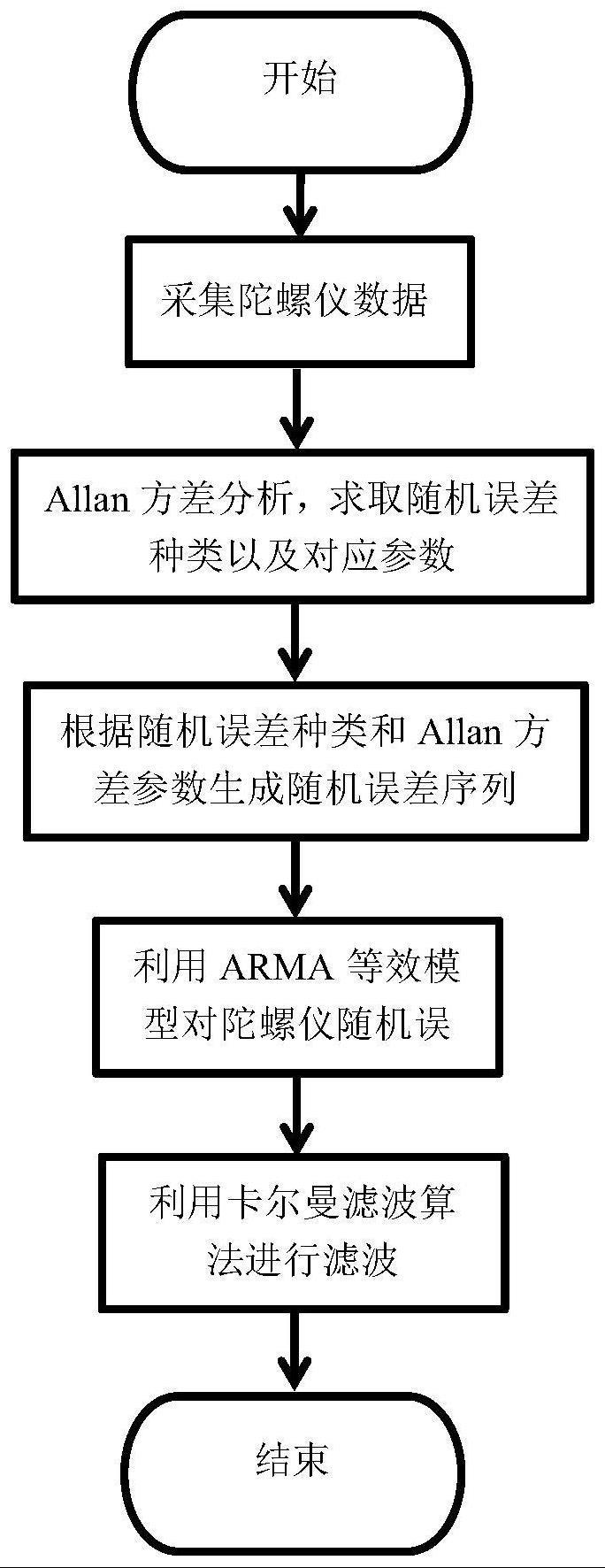
2、一种基于arma等效模型的陀螺仪误差滤波方法,其特征在于:具体步骤如下:
3、第一步,采取陀螺仪的原始数据;
4、第二步,对原始数据进行allan方差分析,得出陀螺仪原始数据的随机误差种类和相应的参数;
5、第三步,利用第二步所求的参数,生成陀螺仪单独种类随机误差的时间序列,建立的对应的arma模型;
6、第四步,利用arma模型的等效原理,将第三步中陀螺仪单独随机误差的arma模型进行等效,构建陀螺仪输出的原始数据的随机误差数学模型;
7、第五步,利用第四步所建数学模型,进行卡尔曼滤波,实现滤波效果。
8、进一步地,所述第二步中,利用allan方差辨识陀螺仪的随机误差种类,主要可以辨识出量化噪声、角度随机游走、零偏不稳定性、角速率随机游走和速率斜坡五种误差。一般情况下陀螺仪的随机误差只表现两种或两种以上误差种类。
9、进一步地,所述第三步中,生成陀螺仪单独种类随机误差的时间序列的原理如下:
10、只考虑角度随机游走和角速率随机游走两种随机误差情况下,误差模型表达式如下:
11、
12、上式中,ωk(t)和ωn(t)分别对应角速率随机游走和角度随机游走的时间分量;ω(t)表示陀螺仪总随机误差;
13、角度随机游走可以等效成白噪声,而角速率随机游走可以等效成白噪声进行积分叠加,故角度随机游走的功率谱密度等于白噪声的功率谱密度;角速率随机游走的功率谱密度等同于白噪声经过积分环节后的功率谱密度,表达式如下:
14、
15、
16、在实际工程中,需要将上式进行离散化。可得离散形式的误差模型表达式如下:
17、
18、上式中,
19、故有随机误差参数和采样频率以及随机误差的时间序列的标准差关系如下:
20、
21、
22、根据上式关系,可以利用matlab等工具生成对应allan方差参数的时间序列,在利用arma模型定义,对生成的时间序列进行建模。
23、进一步地,所述第四步中,arma等效原理等效参数参数关系如下:
24、xt的时间序列模型为arma(m,n),yt的时间序列模型为arma(p,q),等效后为arma((n+p),max(n+p,m+q))。
25、arma等效模型可以从两个等效推广到多个等效。
26、进一步地,所述第五步中,卡尔曼滤波算法中陀螺仪输出的样本方差和arma模型方差关系如下:
27、
28、上式中和为arma等效模型的系数;为陀螺仪输出的样本方差。
29、本发明公开了一种陀螺仪滤波方法,利用allan方差对陀螺仪输出的原始数据进行误差种类分析,在利用arma等效模型对陀螺仪的随机误差进行建模,最后利用卡尔曼滤波算法对陀螺仪的随机误差进行滤波。
技术特征:
1.一种基于arma等效模型的陀螺仪误差滤波方法,其特征在于:具体步骤如下:
2.根据权利要求1中所述的方法,其特征在于:所述第二步中,allan方差分析和拟合陀螺仪的原始数据过程中,要去除allan方差为负的随机误差种类。
3.根据权利要求1中所述的方法,其特征在于:所述第三步中,随机误差参数和采样频率以及随机误差的时间序列的标准差关系如式(1)所示。
4.根据权利要求1中所述的方法,其特征在于:所述第四步中,等效原理等效前后参数关系为:xt的时间序列模型为arma(m,n),yt的时间序列模型为arma(p,q),等效后为arma((n+p),max(n+p,m+q))。
技术总结
本发明提供了一种基于ARMA等效模型的陀螺仪滤波方法,属于惯性导航领域。方法首先利用Allan方差对陀螺仪输出的原始数据进行误差种类分析,在利用ARMA等效模型对陀螺仪的随机误差进行建模,最后利用卡尔曼滤波算法对陀螺仪的随机误差进行滤波。本发明以多个单独的ARMA模型,可以等效成一个ARMA模型为前提,提出一种根据Allan方差分析出的参数建立单独种类随机误差的模型并生成随机误差序列,并依据生成的随机序列对陀螺仪单独随机误差进行ARMA分析并确定阶数,最后根据等效原理对陀螺仪原始数据的随机误差建立ARMA模型。
技术研发人员:李巍,于洪胜
受保护的技术使用者:哈尔滨理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!