用于飞行器上控制与制导的导航定位装置及定位方法与流程
本发明涉及飞行器控制领域,尤其涉及一种用于飞行器上控制与制导的导航定位装置及定位方法。
背景技术:
1、飞行器在工作过程中,导航是最基本也是最核心的功能之一,是保证飞行器可靠飞行,完成既定任务的根本保障。此外,不同的飞行器在工作过程中将面临不同的典型工况,以喷射推进型飞行器为例,其在工作过程中的不同阶段,将经历特征不同的恶劣工况,其中初始阶段点火发射的冲击工况和按飞行任务需求的快速姿态调整工况是两种典型的恶劣工况。一般情况下,飞行器上的控制与制导组件,包含加速度计和陀螺仪的mems惯性组件、gnss接收机及天线、dsp处理器组成的导航定位单元,实时输出飞行器姿态、位置、速度等导航数据,实现定位功能。但在恶劣工况下,控制与制导组件内传感器容易受到影响,导致导航数据精度下降,从而降低飞行器飞行性能,甚至影响任务的完成。
技术实现思路
1、本发明的目的就在于为了解决上述问题设计了一种用于飞行器上控制与制导的导航定位装置及定位方法。
2、本发明通过以下技术方案来实现上述目的:
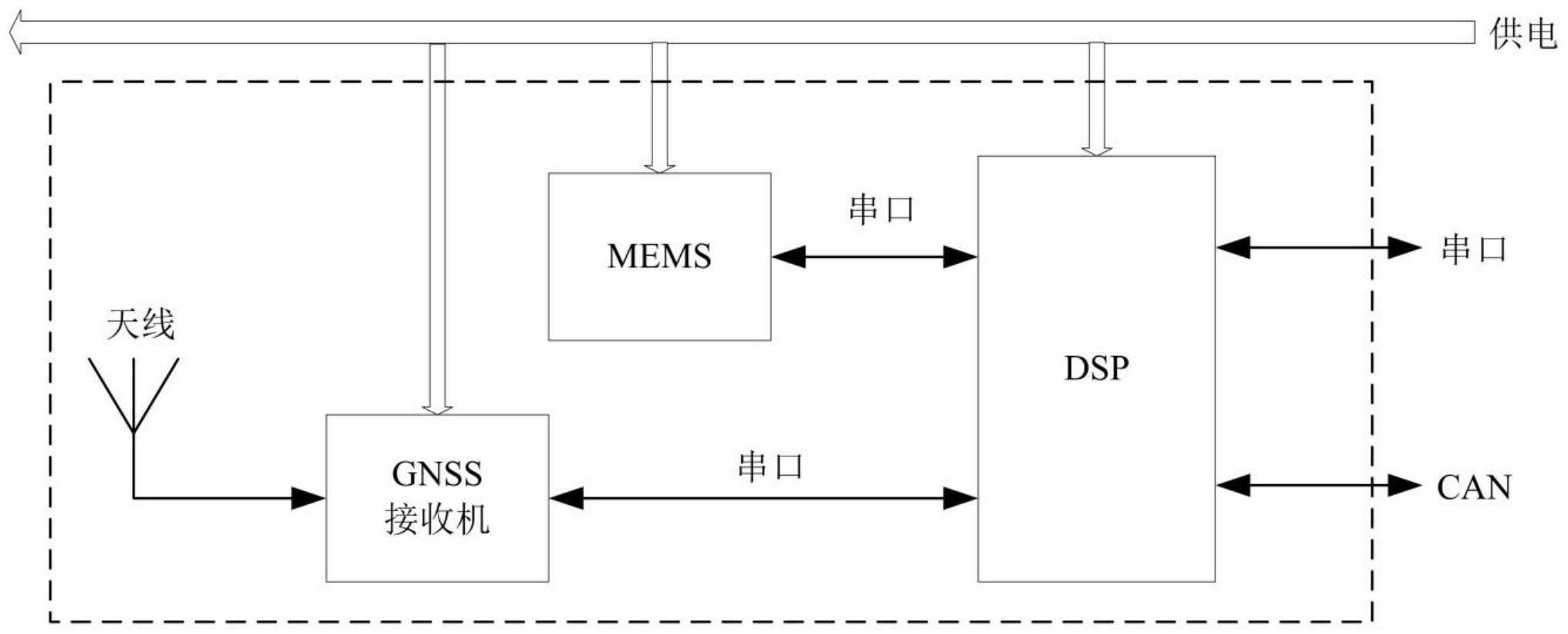
3、用于飞行器上控制与制导的导航定位装置,包括mems惯性组件、gnss接收机、dsp处理器、供电电路和接口电路,gnss接收机用于接收gnss卫星信号,dsp处理器的信号端分别与mems惯性组件的信号端和gnss接收机的信号端连接,供电电路用于mems惯性组件、gnss接收机、dsp处理器、接口电路的工作电源供给;接口电路用于dsp处理器与mems惯性组件和gnss接收机的串口通信。
4、用于飞行器上控制与制导的导航定位方法,包括:
5、s1、mems惯性组件采集飞行器的传感器数据,gnss接收机接收飞行器的定位数据;
6、s2、dsp处理器对传感器数据进行温度补偿和自适应滤波处理,得到处理数据;
7、s3、dsp处理器根据处理数据分析飞行器的工况状态;
8、s4、kalman数字滤波器调用dsp处理器中的系统噪声方差矩阵参数和观测噪声方差矩阵参数,对处理数据和飞行器的定位数据进行kalman组合导航滤波,获得飞行器的导航定位信息。
9、本发明的有益效果在于:基于传感器数字信号数据的实时采集与温度补偿技术、自适应数字滤波技术、动态工况识别与组合导航滤波器参数集预装订技术,提高各类恶劣工况下控制与制导组件的导航定位单元输出导航定位数据的精度。
技术特征:
1.用于飞行器上控制与制导的导航定位装置,其特征在于,包括mems惯性组件、gnss接收机、dsp处理器、供电电路和接口电路,gnss接收机用于接收定位数据,dsp处理器的信号端分别与mems惯性组件的信号端和gnss接收机的信号端连接,供电电路用于mems惯性组件、gnss接收机、dsp处理器、接口电路的工作电源供给;接口电路用于dsp处理器与mems惯性组件和gnss接收机的串口通信。
2.根据权利要求2所述的用于飞行器上控制与制导的导航定位装置,其特征在于,mems惯性组件包括三轴数字陀螺仪、三轴数字加速度计和温度传感器,三轴数字陀螺仪和三轴数字加速度计的三个敏感轴均正交安置。
3.用于飞行器上控制与制导的导航定位方法,其特征在于,包括:
4.根据权利要求3所述的用于飞行器上控制与制导的导航定位方法,其特征在于,在s2中包括:
5.根据权利要求3或4所述的用于飞行器上控制与制导的导航定位方法,其特征在于,在s3中包括:
6.根据权利要求3所述的用于飞行器上控制与制导的导航定位方法,其特征在于,在s2与s3之间还包括,s2’、根据处理数据的标准差动态调整自适应滤波处理的带宽。
技术总结
本发明公开了用于飞行器上控制与制导的导航定位装置及定位方法,涉及飞行器控制领域,装置包括MEMS惯性组件、GNSS接收机、DSP处理器、供电电路和接口电路,方法包括S1采集飞行器的传感器数据,接收飞行器的定位数据;S2、对传感器数据进行温度补偿和自适应滤波处理,得到处理数据;S3、根据处理数据分析飞行器的工况状态;S4、对处理数据和飞行器的定位数据进行Kalman组合导航滤波,获得飞行器的导航定位信息;基于传感器数字信号数据的实时采集与温度补偿技术、自适应数字滤波技术、动态工况识别与组合导航滤波器参数集预装订技术,提高各类恶劣工况下控制与制导组件的导航定位单元输出导航定位数据的精度。
技术研发人员:谭晓军,冯高鹏,拜云山,陈伟,李锋,孙传杰,卢永刚
受保护的技术使用者:中国工程物理研究院总体工程研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!