一种高精度地图构建处理方法及系统与流程
本发明涉及地图构建,具体为一种高精度地图构建处理方法及系统。
背景技术:
1、随着计算机及通信技术的不断发展,地图为人们出行提供了很大帮助,其提供的信息包括但不限于道路信息、楼宇信息、交通信息等。
2、在地图构建技术领域中,基于不同的应用需求对地图的精度需求不同,使得不同的地图一般具有不同的精度。其中,在现有技术中,地图的精度需求一般仅聚焦于道路是否具有高精度,如此,使得即便是具有较高精度的道路的地图,也在整体上存在精度不佳的问题。
技术实现思路
1、本发明的目的在于提供一种高精度地图构建处理方法及系统,以解决上述背景技术中提出的问题。
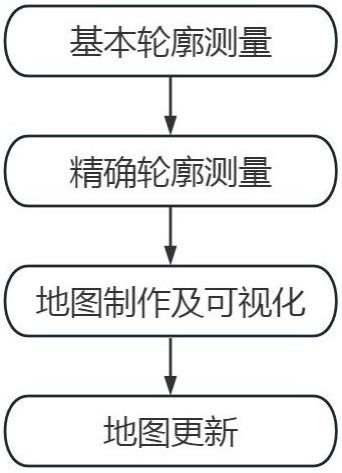
2、为实现上述目的,本发明提供如下技术方案:一种高精度地图构建处理方法及系统,包括以下步骤:
3、s101、基本轮廓测量:利用卫星定位系统技术,对道路两旁的建筑物进行测量,将这些测量数据输出到gis系统中,通过gis系统生成地图的基础信息,形成地理数据库;
4、s102、精确轮廓测量:在地图采集车上搭载激光雷达扫描系统,地图采集车按照行驶路线进行行驶,激光雷达对行驶路线两侧的建筑物和建筑物之间的地面进行扫描,得到点云数据后构建点云样本库;
5、s103、地图制作及可视化:通过地图数据处理器对s102中点云数据进行处理,形成三维地图;
6、s104、地图更新:将多次测量的数据进行整合,通过数据融合和时序分析,可以实现对地图数据的动态更新,并定期更新地图信息,以反映出现实建筑的变化。
7、更进一步的,所述形成s101中的地理数据库中的地理信息包括建筑物的位置及相邻建筑物的最外侧轮廓;
8、还包括相邻建筑物的最外侧轮廓之间所形成的道路网络。
9、更进一步的,所述行驶路线为基于地理数据库形成的三维地理信息而划分的行驶区域;
10、基于行驶区域,地图采集车按照相邻建筑物的最外侧轮廓之间形成的道路行驶;
11、具体的,对于道路的确定包括以下步骤:
12、s301、基于地理数据库形成的三维地理信息,划分出飞行管理区域;
13、s302、在飞行管理区域内,无人机沿着道路网络进行飞行,从而确认建筑物的坐标及道路的宽度;
14、对于行驶路线的确定包括以下步骤:
15、s311、将道路划分为若干个节点,将地图采集车的起点和终点设置为若干节点的起始端和结束端;
16、s312、将相邻的节点进行连线,形成路线图,地图采集车将按照该路线图进行行驶,如果驾驶员行驶偏离该路线图,数据处理终端将会接收到报警信息,接警人员通过驾驶员进行路线纠正。
17、更进一步的,所述s312中的每个节点在数据处理终端中处于点亮状态,当地图采集车行驶过一个节点时,该节点的灯光的颜色进行变更。
18、更进一步的,所述s102中,精确轮廓测量的具体步骤为:
19、s501、激光雷达扫描周围环境并获取点云数据,该点云数据包含激光雷达与建筑物之间的距离;
20、s502、将检测的点云数据汇总到点云样本库,处理点云数据以构建目标三维模型。
21、更进一步的,所述地图数据处理器为本地物理服务器、云服务器、虚拟服务器或者分布式服务器的一种,地图数据处理器将点云数据构造成高清地图后,其本身可以存储该三维地图;
22、更进一步的,所述s104中,地图更新通过地图更新模块进行,基于所述s102中扫描后构建的每一个目标三维建筑物模型对应的物体轮廓信息,对目标三维建筑物模型进行模型更新处理,得到所述初始三维地图对应的目标三维地图,并且计算该目标三维建筑物模型对应的模型轮廓信息与点云样本库中存储的该目标三维建筑物模型原始对应的物体轮廓信息之间的轮廓相似度;
23、设置有轮廓相似度的阈值;
24、目标轮廓相似度小于该轮廓相似度阈值时,将该目标三维建筑物模型确定为待更新三维建筑物模型,对每一个所述待更新三维建筑物模型的模型轮廓进行更新处理,形成最新高精地图。
25、高精度地图构建处理系统,包括无人机、激光雷达扫描系统和地图数据处理器;
26、激光雷达扫描系统包括:
27、图像获取模块,通过激光雷达对行驶路线两侧的建筑物和建筑物之间的地面进行扫描,得到点云数据;
28、轮廓确定模块,对三维建筑物体的多帧建筑物体图像,确定该目标三维建筑物体对应的物体轮廓信息;
29、地图数据处理器将采集的点云数据及通过轮廓确定模块确认的目标轮廓信息通过slam建图方法形成三维地图。
30、与现有技术相比,本发明的有益效果是:
31、该高精度地图构建处理方法及系统,利用卫星定位系统技术,对道路两旁的建筑物进行测量,将这些测量数据输出到gis系统中,通过gis系统生成地图的基础信息,形成地理数据库,在地图采集车上搭载激光雷达扫描系统,地图采集车按照行驶路线进行行驶,激光雷达对行驶路线两侧的建筑物和建筑物之间的地面进行扫描,得到点云数据后构建点云样本库,最后通过地图数据处理器对点云数据进行处理,形成三维地图,地图采集车通过预先设定的路线进行精确行驶,对地图构建区域进行全面信息采集,防止漏采情况发生,提高地图的精度;
32、设置有地图更新模块,将采集的目标三维建筑物模型确定为待更新三维建筑物模型,对每一个所述待更新三维建筑物模型的模型轮廓进行更新处理,形成最新高精地图。
技术特征:
1.一种高精度地图构建处理方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种高精度地图构建处理方法,其特征在于,所述形成s101中的地理数据库中的地理信息包括建筑物的位置及相邻建筑物的最外侧轮廓;
3.根据权利要求2所述的一种高精度地图构建处理方法,其特征在于,所述行驶路线为基于地理数据库形成的三维地理信息而划分的行驶区域;
4.根据权利要求1所述的一种高精度地图构建处理方法,其特征在于,所述s312中的每个节点在数据处理终端中处于点亮状态,当地图采集车行驶过一个节点时,该节点的灯光的颜色进行变更。
5.根据权利要求1所述的一种高精度地图构建处理方法,其特征在于,所述s102中,精确轮廓测量的具体步骤为:
6.根据权利要求1所述的一种高精度地图构建处理方法,其特征在于,所述地图数据处理器为本地物理服务器、云服务器、虚拟服务器或者分布式服务器的一种,地图数据处理器将点云数据构造成高清地图后,其本身可以存储该三维地图。
7.根据权利要求1所述的一种高精度地图构建处理方法,其特征在于,所述s104中,地图更新通过地图更新模块进行,基于所述s102中扫描后构建的每一个目标三维建筑物模型对应的物体轮廓信息,对目标三维建筑物模型进行模型更新处理,得到初始三维地图对应的目标三维地图,并且计算该目标三维建筑物模型对应的模型轮廓信息与点云样本库中存储的该目标三维建筑物模型原始对应的物体轮廓信息之间的轮廓相似度;
8.一种高精度地图构建处理系统,其特征在于,包括无人机、激光雷达扫描系统和地图数据处理器;
技术总结
本发明公开了一种高精度地图构建处理方法及系统,涉及地图构建技术领域。包括以下步骤:S101、基本轮廓测量:利用卫星定位系统技术,对道路两旁的建筑物进行测量,将这些测量数据输出到GIS系统中,通过GIS系统生成地图的基础信息,形成地理数据库。本发明利用卫星定位系统技术,对道路两旁的建筑物进行测量,将这些测量数据输出到GIS系统中,通过GIS系统生成地图的基础信息,形成地理数据库,在地图采集车上搭载激光雷达扫描系统,地图采集车按照行驶路线进行行驶,激光雷达对行驶路线两侧的建筑物和建筑物之间的地面进行扫描,得到点云数据后构建点云样本库,最后通过地图数据处理器对点云数据进行处理,形成三维地图。
技术研发人员:宋仕斌,李成晶
受保护的技术使用者:四川公众项目咨询管理有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!