物体表面检测方法、系统和用于物体表面检测的机械臂与流程
本技术涉及物体检测,特别是涉及物体表面检测方法、系统和用于物体表面检测的机械臂。
背景技术:
1、目前,在进行物体表面检测时往往会通过对被测物体表面进行图像拍摄,以生成点云的方法进行检测。例如,在对汽车表面拼接位置的间隙和面差进行检测时,通常是通过端部设置有激光发射模组和图像采集模组的机械臂进行检测。当该机械臂的检测端移动到待检测目标表面时,会利用激光发射模组将激光束发射到待检测目标表面上,然后通过图像采集模组识别激光束照射到待检测目标表面形成的激光点,并获取图像中的激光点的像素位置坐标,从而根据该像素位置坐标和该图像采集装置的预先标定的内参计算得到激光点对应的三维坐标,然后根据计算得到的空间坐标生成点云,再根据生成的点云进行测量和计算。
2、然而,在实际检测过程中,由于图像采集模组与待检测目标表面往往成一定夹角,从而可能会出现遮挡的情况。例如,参见图1,通过图像采集模组采集照射到b侧的激光点时可能会出现a侧虚线部分对应的激光点无法被采集到,从而导致生成的点云中缺少虚线对应的部分,导致生成的点云的质量较低,在通过该点云进行检测的检测时,则会导致检测结果的准确度较低。
技术实现思路
1、本技术实施例的目的在于提供物体表面检测方法、系统和用于物体表面检测的机械臂,以实现提高检测结果的准确度。具体技术方案如下:
2、本技术实施例的第一方面,提供了一种物体表面检测方法,应用于物体表面检测系统的主控制器,所述系统还包括:面向待检测目标表面两侧设置的第一侧检测装置和第二侧检测装置;所述第一侧检测装置和第二侧检测装置均包括:图像采集模组和激光发射模组;所述第一侧检测装置和第二侧检测装置与所述待检测目标表面之间具有预设距离;
3、所述方法包括:
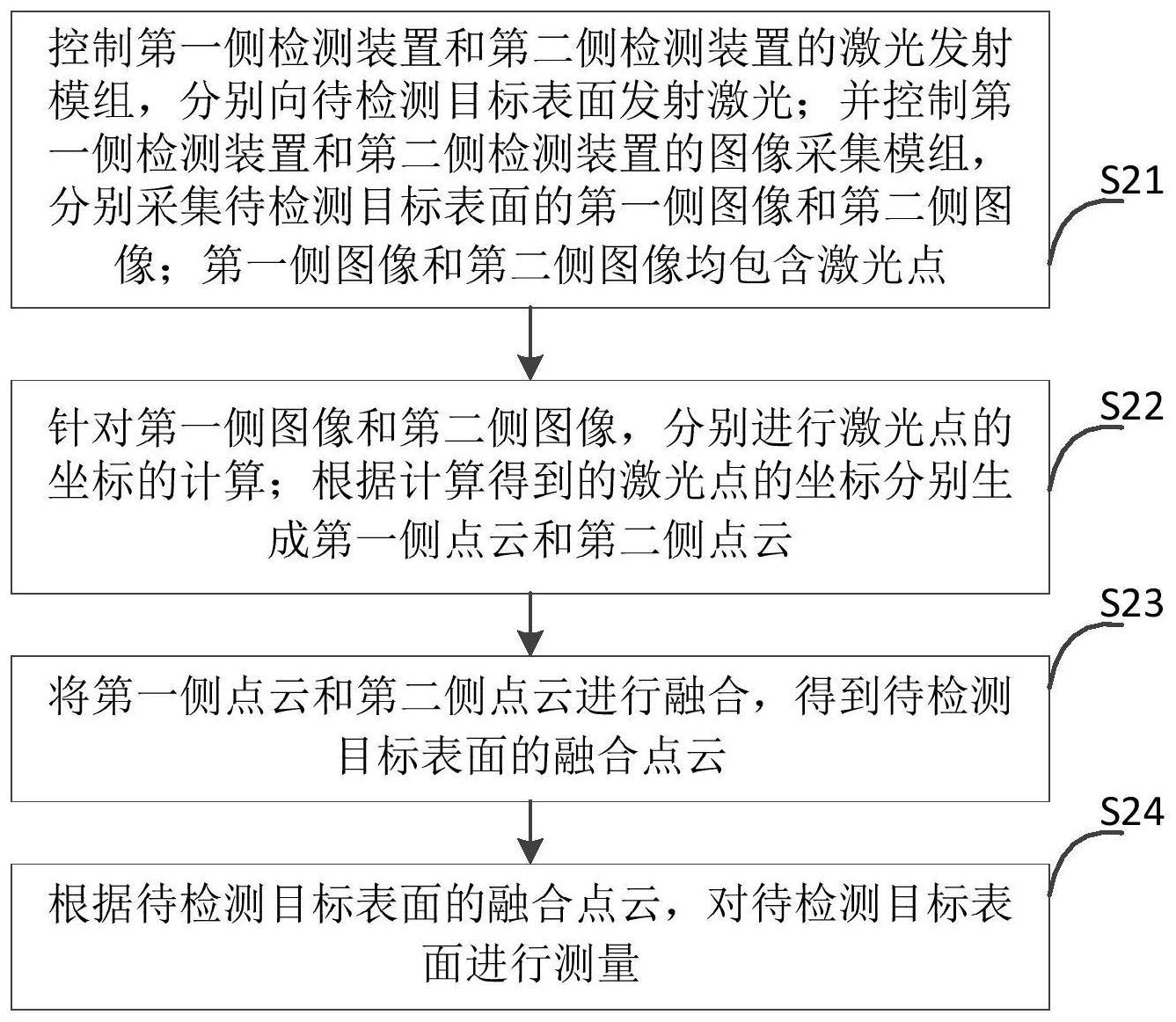
4、控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光;并控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像;所述第一侧图像和第二侧图像均包含激光点;
5、针对所述第一侧图像和第二侧图像,分别进行激光点的坐标的计算;根据计算得到的激光点的坐标分别生成第一侧点云和第二侧点云;
6、将所述第一侧点云和第二侧点云进行融合,得到所述待检测目标表面的融合点云;
7、根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量。
8、在一种可能的实施方式中,所述针对所述第一侧图像和第二侧图像,分别进行激光点的坐标的计算;根据计算得到的激光点的坐标分别生成第一侧点云和第二侧点云,包括:
9、针对所述第一侧图像,计算第一侧图像中的第一侧激光点在第一侧坐标系中的第一坐标,其中,所述第一侧坐标系是所述第一侧检测装置中的图像采集模组对应的坐标系;根据第一坐标生成第一侧点云;
10、针对所述第二侧图像,计算第二侧图像中的第二侧激光点在第二侧坐标系中的第二坐标,其中,所述第二侧坐标系是所述第二侧检测装置中的图像采集模组对应的坐标系;根据第二坐标生成第二侧点云;
11、所述将所述第一侧点云和第二侧点云进行融合,得到所述待检测目标表面的融合点云,包括:
12、根据所述第一侧检测装置与第二侧检测装置中两个图像采集模组之间的相对位置,计算第一坐标和第二坐标在同一坐标系中坐标;
13、根据计算得到的第一坐标和第二坐标在同一坐标系中坐标,将两侧对应的点云进行融合,得到所述待检测目标表面的融合点云。
14、在一种可能的实施方式中,所述第一侧检测装置的激光发射模组所发射的激光的波长与所述第二侧检测装置的激光发射模组所发射的激光的波长不同,
15、所述控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像的步骤,包括:
16、控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集本侧的激光发射模组所发射的激光形成的图像。
17、在一种可能的实施方式中,所述第一侧检测装置和第二侧检测装置的激光发射模组均为能够发射多条平行的激光线的多线激光发射模组;且两个多线激光发射模组发射的多条平行的激光线相互交叉,并具有预设角度。
18、在一种可能的实施方式中,所述两个多线激光发射模组多条平行的激光线的预设角度为30度-60度。
19、在一种可能的实施方式中,所述系统还包括喷雾装置;
20、在所述控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光之前,所述方法还包括:
21、控制所述喷雾装置向所述待检测目标表面喷射蒸汽,以形成预设厚度的水膜。
22、在一种可能的实施方式中,所述待检测目标表面包括至少两个拼接的平面;
23、所述第一侧检测装置和第二侧检测装置相对两个平面的拼接间隙位置对称;
24、所述根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量,包括:
25、根据所述待检测目标表面的融合点云,计算所述至少两个平面之间的间隙和/或面差。
26、在一种可能的实施方式中,所述根据所述待检测目标表面的融合点云,计算所述至少两个平面之间的间隙和/或面差,包括:
27、根据所述待检测目标表面的融合点云,识别所述至少两个平面的轮廓线和多条平行的激光线的交点;
28、根据识别得到的交点和所述预设角度,计算所述至少两个平面的轮廓线和所述多条平行的激光线的夹角、点云间隙和间距,其中,所述点云间隙表示平面的轮廓线和两条平行的激光线的交点之间的距离,所述间隙表示两条平行的激光线之间的距离;根据计算得到的夹角、点云间隙和间距,计算得到所述至少两个平面之间的间隙;
29、和/或,
30、根据所述待检测目标表面的融合点云,获取识别得到的交点的空间坐标;计算识别到的交点在深度方向上的距离,得到所述至少两个平面之间的面差。
31、本技术实施例的第二方面,提供了一种物体表面检测系统,包括:主控制器,面向待检测目标表面两侧设置的第一侧检测装置和第二侧检测装置;所述第一侧检测装置和第二侧检测装置均包括:图像采集模组和激光发射模组;所述第一侧检测装置和第二侧检测装置与所述待检测目标表面之间具有预设距离;
32、所述激光发射模组,用于向所述待检测目标表面发射激光;
33、所述图像采集模组,用于采集所述待检测目标表面的图像;
34、所述主控制器,用于控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光;并控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像;所述第一侧图像和第二侧图像均包含激光点;针对所述第一侧图像和第二侧图像,分别进行激光点的坐标的计算;根据计算得到的激光点的坐标分别生成第一侧点云和第二侧点云;将所述第一侧点云和第二侧点云进行融合,得到所述待检测目标表面的融合点云;根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量。
35、在一种可能的实施方式中,所述主控制器,具体用于针对所述第一侧图像,计算第一侧图像中的第一侧激光点在第一侧坐标系中的第一坐标,其中,所述第一侧坐标系是所述第一侧检测装置中的图像采集模组对应的坐标系;根据第一坐标生成第一侧点云;针对所述第二侧图像,计算第二侧图像中的第二侧激光点在第二侧坐标系中的第二坐标,其中,所述第二侧坐标系是所述第二侧检测装置中的图像采集模组对应的坐标系;根据第二坐标生成第二侧点云;根据所述第一侧检测装置与第二侧检测装置中两个图像采集模组之间的相对位置,计算第一坐标和第二坐标在同一坐标系中坐标;根据计算得到的第一坐标和第二坐标在同一坐标系中坐标,将两侧对应的点云进行融合,得到所述待检测目标表面的融合点云。
36、在一种可能的实施方式中,所述第一侧检测装置的激光发射模组所发射的激光的波长与所述第二侧检测装置的激光发射模组所发射的激光的波长不同,每一侧图像采集模组仅采集本侧激光发射模组所发射的激光形成的图像。
37、在一种可能的实施方式中,所述第一侧检测装置和第二侧检测装置的激光发射模组均为能够发射多条平行的激光线的多线激光发射模组;且两个多线激光发射模组发射的多条平行的激光线相互交叉,并具有预设角度。
38、在一种可能的实施方式中,所述系统还包括机械臂;
39、所述机械臂端部设置有安装壳体;所述主控制器设置在所述安装壳体内与所述第一侧检测装置和第二侧检测装置电连接;所述第一侧检测装置和第二侧检测装置间隔对称设置在所述机械臂的安装壳体面向待检测目标表面的端面上。
40、在一种可能的实施方式中,所述第一侧检测装置和第二侧检测装置的图像采集模组均包含双目相机,所述双目相机包括两个镜头;所述两个镜头沿所述第一侧检测装置和第二侧检测装置的对称轴平行的方向,间隔设置;
41、所述第一侧检测装置和第二侧检测装置的激光发射模组均设置在两个镜头之间的第一间隔区域中。
42、在一种可能的实施方式中,所述激光发射模组包括:沿激光发射方向依次设置的激光发射器、准直透镜、鲍威尔棱镜和衍射光学元件;激光发射器发出激光经过准直透镜准直成点光斑,点光斑经过鲍威尔棱镜,形成线激光,经过衍射光学元件衍射后,形成多线平行激光。
43、在一种可能的实施方式中,所述系统还包括喷雾装置;
44、所述喷雾装置的喷嘴安装在所述机械臂的安装壳体面向待检测目标表面的端面上,位于所述第一侧检测装置和第二侧检测装置之间的第二间隔区域中;
45、所述主控制器,还与所述喷雾装置电连接,以控制所述喷雾装置的喷嘴向所述待检测目标表面喷射蒸汽,以形成预设厚度的水膜。
46、在一种可能的实施方式中,所述喷雾装置还包括:设置在所述安装壳体内的蒸汽箱、喷阀和喷阀控制器;
47、所述喷嘴通过管道与所述喷阀和蒸汽箱分别连通;所述主控制器还与所述喷阀控制器和蒸汽箱中的加热器电连接,以控制加热器加热以及喷阀打开或关闭,使得所述蒸汽箱中产生的蒸汽通过所述喷阀和喷嘴喷射出去。
48、本技术实施例的第三方面,提供了一种用于物体表面检测的机械臂,包括主控制器、面向待检测目标表面两侧设置的第一侧检测装置和第二侧检测装置;所述第一侧检测装置和第二侧检测装置均包括:图像采集模组和激光发射模组;
49、所述机械臂端部设置有安装壳体;所述主控制器设置在所述安装壳体内与所述第一侧检测装置和第二侧检测装置电连接;所述第一侧检测装置和第二侧检测装置间隔对称设置在所述机械臂的安装壳体面向待检测目标表面的端面上;
50、所述激光发射模组,用于向所述待检测目标表面发射激光;
51、所述图像采集模组,用于采集所述待检测目标表面的图像;
52、所述主控制器,用于控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光;并控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像;所述第一侧图像和第二侧图像均包含激光点;针对所述第一侧图像和第二侧图像,分别进行激光点的坐标的计算;根据计算得到的激光点的坐标分别生成第一侧点云和第二侧点云;将所述第一侧点云和第二侧点云进行融合,得到所述待检测目标表面的融合点云;根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量。
53、在一种可能的实施方式中,所述主控制器,具体用于针对所述第一侧图像,计算第一侧图像中的第一侧激光点在第一侧坐标系中的第一坐标,其中,所述第一侧坐标系是所述第一侧检测装置中的图像采集模组对应的坐标系;根据第一坐标生成第一侧点云;针对所述第二侧图像,计算第二侧图像中的第二侧激光点在第二侧坐标系中的第二坐标,其中,所述第二侧坐标系是所述第二侧检测装置中的图像采集模组对应的坐标系;根据第二坐标生成第二侧点云;根据所述第一侧检测装置与第二侧检测装置中两个图像采集模组之间的相对位置,计算第一坐标和第二坐标在同一坐标系中坐标;根据计算得到的第一坐标和第二坐标在同一坐标系中坐标,将两侧对应的点云进行融合,得到所述待检测目标表面的融合点云。
54、在一种可能的实施方式中,所述第一侧检测装置的激光发射模组所发射的激光的波长与所述第二侧检测装置的激光发射模组所发射的激光的波长不同,每一侧图像采集模组仅采集本侧激光发射模组所发射的激光形成的图像。
55、在一种可能的实施方式中,所述第一侧检测装置和第二侧检测装置的激光发射模组均为能够发射多条平行的激光线的多线激光发射模组;且两个多线激光发射模组发射的多条平行的激光线相互交叉,并具有预设角度。
56、在一种可能的实施方式中,所述第一侧检测装置和第二侧检测装置的图像采集模组均包含双目相机,所述双目相机包括两个镜头;所述两个镜头沿所述第一侧检测装置和第二侧检测装置的对称轴平行的方向,间隔设置;
57、所述第一侧检测装置和第二侧检测装置的激光发射模组均设置在两个镜头之间的第一间隔区域中。
58、在一种可能的实施方式中,所述激光发射模组包括:沿激光发射方向依次设置的激光发射器、准直透镜、鲍威尔棱镜和衍射光学元件;激光发射器发出激光经过准直透镜准直成点光斑,点光斑经过鲍威尔棱镜,形成线激光,经过衍射光学元件衍射后,形成多线平行激光。
59、在一种可能的实施方式中,所述机械臂还包括喷雾装置;
60、所述喷雾装置的喷嘴安装在所述机械臂的安装壳体面向待检测目标表面的端面上,位于所述第一侧检测装置和第二侧检测装置之间的第二间隔区域中;
61、所述主控制器,还与所述喷雾装置电连接,以控制所述喷雾装置的喷嘴向所述待检测目标表面喷射蒸汽,以形成预设厚度的水膜。
62、在一种可能的实施方式中,所述喷雾装置还包括:设置在所述安装壳体内的蒸汽箱、喷阀和喷阀控制器;
63、所述喷嘴通过管道与所述喷阀和蒸汽箱分别连通;所述主控制器还与所述喷阀控制器和蒸汽箱中的加热器电连接,以控制所述加热器加热以及所述喷阀打开或关闭,使得所述蒸汽箱中产生的蒸汽通过所述喷阀和喷嘴喷射出去。
64、本技术实施例有益效果:
65、本技术实施例提供的物体表面检测方法、系统和用于物体表面检测的机械臂,其中,物体表面检测方法,应用于物体表面检测系统的主控制器,所述系统还包括:面向待检测目标表面两侧设置的第一侧检测装置和第二侧检测装置;所述第一侧检测装置和第二侧检测装置均包括:图像采集模组和激光发射模组;所述第一侧检测装置和第二侧检测装置与所述待检测目标表面之间具有预设距离;所述方法包括:控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光;并控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像;所述第一侧图像和第二侧图像均包含激光点;针对所述第一侧图像和第二侧图像,分别进行激光点的坐标的计算;根据计算得到的激光点的坐标分别生成第一侧点云和第二侧点云;将所述第一侧点云和第二侧点云进行融合,得到所述待检测目标表面的融合点云;根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量。通过本技术的方案,在待检测目标表面两侧设置的第一侧检测装置和第二侧检测装置,所述第一侧检测装置和第二侧检测装置均包括:图像采集模组和激光发射模组,通过控制所述第一侧检测装置和第二侧检测装置的激光发射模组,分别向所述待检测目标表面发射激光,并控制所述第一侧检测装置和第二侧检测装置的图像采集模组,分别采集所述待检测目标表面的第一侧图像和第二侧图像,从而根据图像进行激光点的坐标的计算生成点云,避免被遮挡的情况,并且通过将所述第一侧点云和第二侧点云进行融合,然后根据所述待检测目标表面的融合点云,对所述待检测目标表面进行测量,可以提高生成的点云的质量,进而在通过该点云进行物体表面的测量时,提高测量的精度。
66、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!