无人机视觉定位方法及系统与流程
本申请涉及无人机自主飞行领域,尤其涉及一种无人机视觉定位方法及系统。
背景技术:
1、无人机导航方法是引导飞行器以一定的速度和方向完成运行过程的技术和方法,其中最关键的技术之一就是对无人机进行实时地跟踪定位。
2、目前无人机等运动载体的定位主要依靠gnss和惯性导航系统(ins),使用gnss(全球导航卫星系统)容易受到地形、建造物等因素影响,会出现信号丢失的问题,不能对无人机进行实时有效的定位,具有安全隐患;而惯性导航系统中较常使用的imu(inertialmeasurement unit惯性传感器),imu为当前较为成熟的视觉融合定位方法,但其深度估计结果易受无人机的高度影响,在无人机升高到50m以上的高度时,由于深度估计精度下降的缘故,融合定位算法的精度和鲁棒性都大幅度下降,容易发生导航偏移,不能精确得到无人机的准确位置。
3、本申请旨在解决无人机的视觉定位问题,保证无人机安全。
技术实现思路
1、本申请提供一种无人机视觉定位方法及系统,用以解决无人机在不同高度的定位问题。
2、一方面,本申请提供一种无人机视觉定位方法,该方法包括:
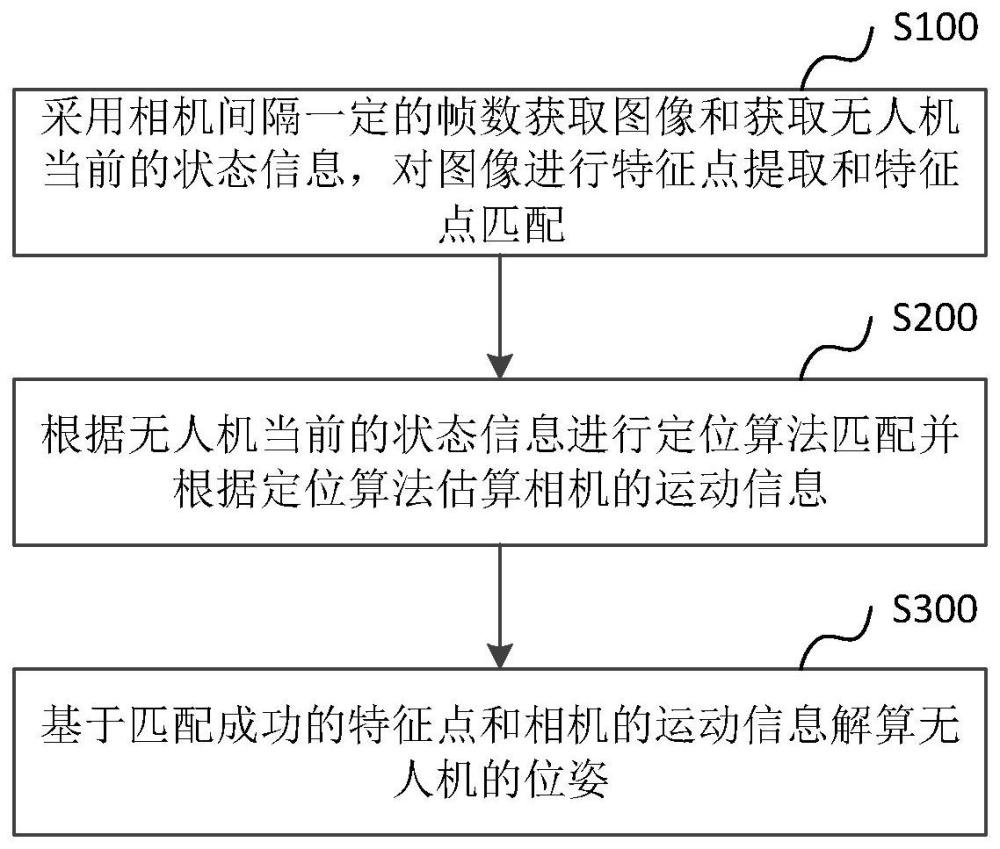
3、获取无人机当前的状态信息和采用相机间隔一定的帧数获取图像,对图像进行特征点提取和特征点匹配,用于找到每帧图像间的匹配成功的特征点;
4、根据无人机当前的状态信息进行定位算法匹配并根据定位算法估算相机的运动信息;
5、基于匹配成功的特征点和相机的运动信息解算无人机的位姿。
6、在其中一个实施例中,基于匹配成功的特征点和相机的运动信息解算无人机的位姿,具体还包括:
7、基于匹配成功的特征点和相机的运动信息利用三角化方法获得特征点在三维空间的深度值,进而获取特征点在三维空间的坐标。
8、在其中一个实施例中,无人机当前的状态信息包括无人机的高度,根据无人机当前的状态信息进行定位算法匹配,具体包括:
9、无人机的高度小于阈值时,定位算法采用基础矩阵进行估算相机的运动信息,相机的运动信息包括图像间的旋转信息和平移信息。
10、在其中一个实施例中,根据无人机当前的状态信息进行定位算法匹配,具体还包括:
11、无人机的高度大于阈值时,定位算法采用单应矩阵进行估算相机的运动信息,相机的运动信息包括图像间的旋转信息和平移信息。
12、在其中一个实施例中,对图像进行特征点提取和特征点匹配,具体包括:
13、构建图像金字塔并基于光流法对图像中特征点进行追踪,以获取两帧特征点之间的匹配关系。
14、在其中一个实施例中,在基于匹配成功的特征点和相机的运动信息解算无人机的位姿之后,方法还包括:
15、构建优化关系,根据优化关系结果更新无人机的位姿,获取无人机的定位。
16、在其中一个实施例中,构建优化关系包括:
17、利用惯性测量单元获取两帧图像采集时间间隔内的惯性预积分增量,从而获取匹配成功的特征点在三维空间的坐标。
18、在其中一个实施例中,根据优化关系结果更新无人机的位姿,获取无人机的定位,具体包括:
19、利用视觉定位和惯性测量单元获取的三维空间的坐标构建重投影模型,分别计算其重投影误差;
20、选取误差最小的重投影模型,根据重投影模型对无人机的位姿进行优化。
21、另一方面,本申请提供一种无人机视觉定位系统,该系统包括:
22、获取模块,用于获取图像和无人机当前的状态信息;
23、特征匹配模块,用于对获取的图像进行特征点提取和特征点匹配,用于找到每帧图像间的匹配成功的特征点;
24、视觉定位模块,用于根据无人机当前的状态信息进行定位算法匹配并根据定位算法估算相机的运动信息,并基于匹配成功的特征点和相机的运动信息解算无人机的位姿。
25、在其中一个实施例中,该定位系统还包括:
26、优化模块,用于构建优化关系,根据优化关系结果更新无人机的位姿,获取无人机的定位。
27、本申请提供的一种无人机视觉定位方法,通过采用相机间隔一定的帧数获取图像和获取无人机当前的状态信息,对图像进行特征点提取和特征点匹配,用于找到每帧图像间的匹配成功的特征点;再根据无人机当前的状态信息进行定位算法匹配并根据定位算法估算相机的运动信息;基于匹配成功的特征点和相机的运动信息解算无人机的位姿。根据无人机当前的状态信息去进行定位算法的匹配,选择适合无人机当前状态信息的定位算法,进一步地,实现无人机精准定位的效果。
技术特征:
1.一种无人机视觉定位方法,其特征在于,所述方法包括:
2.如权利要求1所述的无人机视觉定位方法,其特征在于,所述基于匹配成功的特征点和所述相机的运动信息解算无人机的位姿,具体还包括:
3.如权利要求2所述的无人机视觉定位方法,其特征在于,所述无人机当前的状态信息包括无人机的高度,根据无人机当前的状态信息进行定位算法匹配,具体包括:
4.如权利要求2所述的无人机视觉定位方法,其特征在于,所述根据无人机当前的状态信息进行定位算法匹配,具体还包括:
5.如权利要求1所述的无人机视觉定位方法,其特征在于,所述对所述图像进行特征点提取和特征点匹配,具体包括:
6.如权利要求1-5任一项所述的无人机视觉定位方法,其特征在于,在基于匹配成功的特征点和所述相机的运动信息解算无人机的位姿之后,所述方法还包括:
7.如权利要求6所述的无人机视觉定位方法,其特征在于,所述构建优化关系包括:
8.如权利要求7所述的无人机视觉定位方法,其特征在于,根据所述优化关系结果更新无人机的位姿,获取无人机的定位,具体包括:
9.一种无人机视觉定位系统,其特征在于,包括:
10.如权利要求9所述的无人机视觉定位系统,其特征在于,所述定位系统还包括:
技术总结
本申请提供一种无人机视觉定位方法及系统。该方法通过采用相机间隔一定的帧数获取图像和获取无人机当前的状态信息,对图像进行特征点提取和特征点匹配,用于找到每帧图像间的匹配成功的特征点;再根据无人机当前的状态信息进行定位算法匹配并根据定位算法估算相机的运动信息;基于匹配成功的特征点和相机的运动信息解算无人机的位姿。根据无人机当前的状态信息去进行定位算法的匹配,选择适合无人机当前状态信息的定位算法,进一步地,实现无人机精准定位的效果。
技术研发人员:田瑜,蔡旭航
受保护的技术使用者:峰飞航空科技(昆山)有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!