一种三波长三维激光测速装置及方法与流程
本发明涉及一种三波长三维激光测速装置及方法,属于光电测量。
背景技术:
1、物质处于永恒的运动之中,因而,运动参数的测量是人类社会生产实践活动中的基本需求之一,通常,其涉及速度、位移、加速度三个运动参量的测量,三者均属于运动参量的表征方式。它们之间既有区别,又有联系,位移量属于速度量的积分,加速度量则是速度量的微分。有了其中之一,就可以通过计算和初始条件限定,获得另外两者。
2、由于运动中的物体的轨迹可以有直线、平面曲线、三维空间曲线等不同形式,相应地,导致物体运动速度有一维直线速度、二维平面曲线速度、三维空间曲线速度的测量与表征方式,并且研究发展了相适应的传感器和传感器组完成相应功能。
3、通常,运动测量传感器中,使用惯性原理进行运动加速度测量,进而获得运动速度和运动位移。它客观上需要将传感器安装到运动物体上,由此产生了安装传感器引起的众多问题,对于轻、薄、小、软等众多物体的运动速度,无法使用传感器方法进行有效测量。
4、激光测振仪是一种通用、基础性振动、冲击测量仪器,可用于运动速度、位移、加速度的测量,属于具有高精度、非接触、对被测对象无附加干扰和影响的测量仪器,其测量机理是使用了相对运动物体之间的激光多普勒效应。由于激光善于走直线,而不能拐弯,通常用于一维直线运动的速度、位移和加速度的测量,并且要求,测量过程中,运动速度方向要与测量激光相互平行或垂直,否则会带来额外测量误差。
5、对于具有空间曲线轨迹运动的三维运动速度的测量,往往使用三组相互正交的激光测振仪同时执行测量,然后进行矢量合成方式获得合成速度。由此产生的问题是,三组相互正交的测速激光,由于空间遮挡等限制,很难照射到同一目标点上,因而造成测量局限性和由此产生的测量误差,极大限制了其应用场合与应用对象。因此,三维激光测速成为运动测量中的一个难点问题。
技术实现思路
1、针对三维激光测速中存在的空间遮挡问题,以及测量激光不能走曲线,只能走直线的特点,本发明的目的是提供一种三波长三维激光测速装置及方法,构建出相互正交的三个空间方向的运动速度测量部分,将被测对象的空间运动速度分解为相互正交的三个方向的速度分量,分别使用不同波长的测量激光执行同步测量,再合成形成三维运动速度的测量结果输出,从而实现三维运动速度的测量。
2、对于三个激光波长,本发明使用共光路测量方式实现激光测速,使用不同参数的衍射光学元件doe,用于不同波长激光的分离和提取,并保障它们在测量过程中不互相干扰,获得完全相互独立的三维测量结果。
3、本发明是通过以下技术方案实现的。
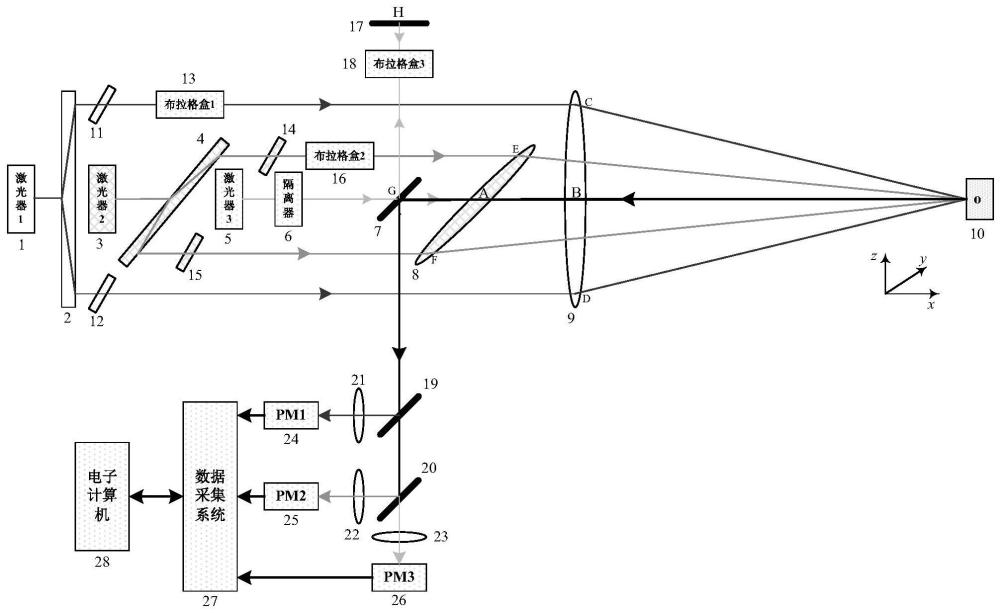
4、本发明公开的一种三波长三维激光测速装置,包括第一激光器、第二激光器、第三激光器、第一分光棱镜、第二分光棱镜、隔离器、偏振分光镜、第一透镜、第二透镜、第三透镜、第四透镜、第五透镜、被测对象、第一棱镜、第二棱镜、第三棱镜、第四棱镜、第一布拉格盒、第二布拉格盒、第三布拉格盒、反射镜、短波通光栅衍射器件、长波通光栅衍射器件、第一光电探测器、第二光电探测器、第三光电探测器、数据采集系统、电子计算机。
5、定义被测对象位于o点,第二透镜中心位于b点。沿o点、b点形成的轴线上依次布设有偏振分光镜、隔离器、第三激光器。第一布拉格盒的出射光入射到第二透镜的c点处。第二棱镜出射光照射到第二透镜的d点处。第二布拉格盒的出射光照射到第一透镜的e点处。第四棱镜出射光照射到第一透镜的f点处。几何关系满足如下约束条件:cd⊥ob,bc=bd;ef⊥oa,ae=af;cd⊥ef。ef>cd。
6、bo方向为x轴方向;ae方向为y轴方向;bc方向为z轴方向。
7、第一激光器用于输出的波长为λa的激光,第一布拉格盒用于产生固定频移δfa。
8、第三布拉格盒位于偏振分光镜与反射镜形成的光路之间。电子计算机与数据采集系统之间进行数据传输。数据采集系统用于采集第一光电探测器、第二光电探测器、第三光电探测器的探测信息。第三透镜位于第一光电探测器与短波通光栅衍射器件形成的光路之间。第四透镜位于第二光电探测器与长波通光栅衍射器件形成的光路之间。第五透镜位于第三光电探测器与长波通光栅衍射器件形成的光路之间。
9、本发明公开的一种三波长三维激光测速方法,基于所述一种三波长三维激光测速装置实现。本发明公开的一种三波长三维激光测速方法为:
10、1)z方向速度测量;
11、由第一激光器输出的波长为λa的激光,经过第一分光棱镜,分成z方向的两束激光;
12、第一束激光通过第一棱镜后,经过第一布拉格盒产生固定频移δfa,然后,经过第二透镜聚焦照射到位于第二透镜焦点处的被测对象上,经被测对象反射回来后,与第二束激光合束。
13、第二束激光通过第二棱镜后,经过第二透镜聚焦照射到位于第二透镜焦点处的被测对象上,经被测对象反射回来后,与第一束激光合束。
14、第一激光、第二激光两束激光合束后,先后穿过第二透镜、第一透镜,被偏振分光镜反射到达短波通光栅衍射器件,被短波通光栅衍射器件反射,经过第三透镜聚焦产生干涉,通过第一光电探测器,探测到包含被测对象的z方向运动速度分量vz造成的多普勒频移δfc,d的调频信号,该调频信号经过数据采集系统进行数据采集后,通过电子计算机进行解调运算获得vz造成的多普勒频移δfc,d,然后,通过公式(1)计算获得vz为:
15、
16、其中,vz为被测对象的z方向运动速度分量;λa为第一激光器输出的激光波长λa;δfc,d为c点与d点之间的多普勒频移幅度值;dcd为c点与d点之间的距离值;lob为第二透镜和被测对象之间的距离值,也是第二透镜的焦距值;
17、2)y方向速度测量;
18、由第二激光器输出的波长为λb的激光,经过第二分光棱镜,分成y方向的两束激光;
19、第1束激光通过第三棱镜后,经过第二布拉格盒产生固定频移δfb,然后,经过第一透镜聚焦照射到位于第一透镜焦点处的被测对象上,经被测对象反射回来后,与第2束激光合束。
20、第2束激光通过第四棱镜后,经过第一透镜聚焦照射到位于第一透镜焦点处的被测对象上,经被测对象反射回来后,与第1束激光合束。
21、第1、第2两束激光合束后,先后穿过第二透镜、第一透镜,被偏振分光镜反射,穿过短波通光栅衍射器件,到达长波通光栅衍射器件,经长波通光栅衍射器件反射,经过第四透镜聚焦产生干涉,通过第二光电探测器,探测到包含被测对象的y方向运动速度分量vy造成的多普勒频移δfe,f的调频信号,该调频信号经过数据采集系统进行数据采集后,通过电子计算机进行解调运算获得vy造成的多普勒频移δfe,f,然后,通过公式(2)计算获得vy为:
22、
23、其中,vy为被测对象的y方向运动速度分量;λb为第二激光器输出的激光波长λb;δfe,f为e点和f点之间的多普勒频移幅度值;def为e点和f点之间的距离值;loa为第一透镜和被测对象之间的距离值,也是第一透镜的焦距值;
24、3)x方向速度测量;
25、由第三激光器输出的波长为λc的激光,穿过隔离器,被偏振分光镜一分为二;
26、一束参考激光经过第三布拉格盒产生固定频移δfc,然后,经过反射镜反射回来,再次经过第三布拉格盒产生固定频移δfc,穿过偏振分光镜与另一束测量激光合束;
27、另一束测量激光先后穿过第一透镜、第二透镜,到达被测对象,经被测对象反射回来后,再次穿过第二透镜、第一透镜,被偏振分光镜反射,与前一束参考激光合束。
28、两束激光合束后,先后穿过短波通光栅衍射器件、长波通光栅衍射器件,经过第五透镜聚焦产生干涉,通过第三光电探测器,探测到包含被测对象的x方向运动速度分量vx造成的多普勒频移δfog的调频信号,该调频信号经过数据采集系统进行数据采集后,通过电子计算机进行解调运算获得vx造成的多普勒频移δfog,通过公式(3)计算获得vx为:
29、
30、其中,vx为被测对象的x方向运动速度分量;λc为第三激光器输出的激光波长;δfog为g点与o点之间的多普勒频移幅度值;
31、4)三维速度测量;
32、上述x、y、z三个方向的速度分量vx、vy、vz后,被测对象的三维运动速度的合成结果v为:
33、
34、即实现三波长三维激光测速。
35、进一步,使用三个不同波长激光的共光路布局,用相互垂直的三个方向的速度分量合成,以获得任意方向上的运动速度测量值。
36、进一步,所用的三个不同波长激光的速度测量,均采用外差式测量,能够同时给出速度幅值和方向信息。
37、进一步,所用的三个不同波长激光的波长λa、λb、λc。有关系要求:
38、λa>λc>λb
39、有益效果:
40、1、本发明的一种三波长三维激光测速装置及方法,使用共光路的三个波长激光,分别测量运动目标对象在相互垂直的三个方向的运动速度分量,然后合成运动目标的三维运动速度,实现三波长三维激光测速。
41、2、本发明的一种三波长三维激光测速装置及方法,通过三个不同波长激光的共光路布局,避免三维激光测速中的遮挡问题,并且能够获得任意方向上的运动速度测量值,无需有运动目标必须与测量光垂直或平行的测量要求。
42、3、本发明的一种三波长三维激光测速装置及方法,通过相互正交的空间光路布局,可以将三维运动速度测量的复杂问题简化为三个方向上的一维简单问题进行处理,并且三个方向可以互相独立,没有互相干扰的问题。
43、4、本发明的一种三波长三维激光测速装置及方法,在三个方向上,均使用外差式测量,能够同时给出速度的幅度和方向,完整表征其矢量特性。
- 还没有人留言评论。精彩留言会获得点赞!