一种水下多目标跟踪方法
本发明水下探测,具体涉及一种水下多目标跟踪方法。
背景技术:
1、随着技术的发展,利用有人或无人潜航器在水下活动越来越频繁,因而对于潜航器的监测显得尤为重要。
2、在水下对无人潜航器等目标进行追踪定位时,由于水下存在着噪声干扰、以及多径效应,往往会出现漏检、虚检的情况。
3、因而在噪声及多径环境下对水下多目标进行准确追踪定位成了亟待解决的技术问题。
技术实现思路
1、有鉴于此,本发明提供了一种水下多目标跟踪方法,能够高效地对水下多目标进行定位和追踪。
2、本发明所采用的技术方案为:
3、一种水下多目标跟踪方法,包括步骤:
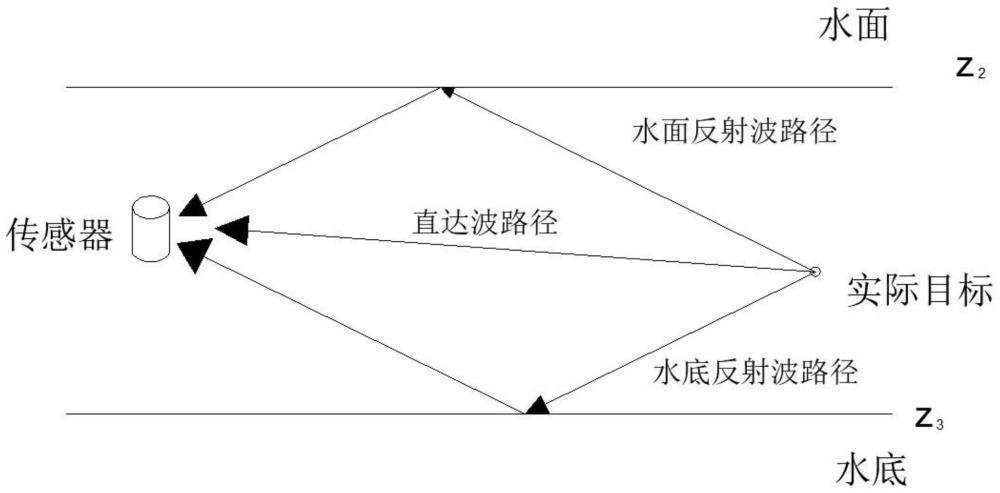
4、s100、建立三维空间坐标系,获取传感器的坐标(x0,y0,z0),监控水体体积v,水面在z轴的坐标z2,水底在z轴的坐标z3,杂波密度λ;
5、s200、传感器周期性获取量测信息,所述量测信息包括方位角θ、俯仰角以及与直达波之间的时延τ,第i帧中的量测信息的集合记为z(i),传感器获取单个目标的量测信息的数量为l,i为任意正整数,第i帧中的第j个量测信息记为zj(i),第i帧中的量测信息的总数为mi;
6、s300、在监控水体体积内随机生成k个虚拟目标ck=[c1,c2,...,ck],并根据先验公式表示一个量测信息来自于某个传播路径的可能性,公式表示为:
7、
8、
9、其中,为目标ck通过路径l产生量测信息的检测概率,π00为量测信息来源于杂波的概率;πkl为路径l产生量测信息来源于目标ck的概率;
10、s400、根据对数似然比建立水下目标模型,表示为:
11、
12、其中,pl(zj(i)|ck)=n[zj(i);hl(ck,cs,i)]表示目标ck通过路径l产生量测zj(i)的似然函数;cs表示传感器的坐标(x0,y0,z0),ck表示第k个虚拟目标的坐标(xk,yk,zk),hl(·)表示第l种路径所对应的量测信息的模型;
13、s500、根据水下目标模型得到实际目标数量和各个实际目标的最优坐标。
14、优选地,单个目标的量测信息l=3,分别为直达波路径、水面反射波路径和水底反射波路径;
15、其中,
16、直达波路径所对应的量测信息表达为
17、水面反射波路径所对应的量测信息表达为
18、水底反射波路径所对应的量测信息表达为
19、优选地,
20、
21、
22、τ1(ck)=0
23、
24、
25、
26、
27、
28、
29、其中,c为水下声速。
30、优选地,在步骤s100中,还获取方位角方差μ、俯仰角方差ω和时延方差υ,
31、所述传感器为矢量水听器,
32、所述方位角方差和所述时延方差直接从所述传感器获取;
33、所述直达波路径的俯仰角方差ω直达满足
34、ω直达~gmm=0.6*n(0,1^2)+0.4*n(0,4^2),
35、所述水面反射波路径和水底反射波路径的俯仰角方差ω多径满足
36、ω多径~gmm=0.4*n(0,1^2)+0.6*n(0,4^2);
37、直达波路径所对应的量测信息表达为
38、
39、水面反射波路径所对应的量测信息表达为
40、
41、水底反射波路径所对应的量测信息表达为
42、
43、优选地,在步骤s200中,传感器连续获取nw帧数据;
44、在步骤s400中,根据对数似然比建立水下目标模型,表示为:
45、
46、本发明的有益效果:
47、本发明通过传感器获取实际量测信息,然后随机生成k个虚拟目标,每个虚拟目标都能够产生l个虚拟量测信息,将这些虚拟量测信息与实际量测信息来进行对比,从而得到各个虚拟量测信息的检测概率和杂波概率,并依据此建立水下目标模型,从而能够得到水下目标的数量和各个目标的最优坐标,实现了在噪声环境下对水下多目标的定位及追踪。
技术特征:
1.一种水下多目标跟踪方法,其特征在于,包括步骤:
2.根据权利要求1所述的水下多目标跟踪方法,其特征在于,单个目标的量测信息l=3,分别为直达波路径、水面反射波路径和水底反射波路径;
3.根据权利要求2所述的水下多目标跟踪方法,其特征在于,
4.根据权利要求3所述的水下多目标跟踪方法,其特征在于,在步骤s100中,还获取方位角方差μ、俯仰角方差ω和时延方差υ,
5.根据权利要求1-4任一项所述的水下多目标跟踪方法,其特征在于,在步骤s200中,传感器连续获取nw帧数据;
技术总结
本发明涉及一种水下多目标跟踪方法,包括步骤:建立三维空间坐标系,获取传感器的坐标,监控水体体积,水面在Z轴的坐标Z<subgt;2</subgt;,水底在Z轴的坐标Z<subgt;3</subgt;,杂波密度λ;传感器周期性获取量测信息,所述量测信息包括方位角、俯仰角以及与直达波之间的时延,第i帧中的量测信息的集合记为Z(i),传感器获取单个目标的量测信息的数量为L;在监控水体体积内随机生成K个虚拟目标c<supgt;K</supgt;=[c<subgt;1</subgt;,c<subgt;2</subgt;,...,c<subgt;K</subgt;],并根据先验公式表示一个量测信息来自于某个传播路径的可能性;根据对数似然比建立水下目标模型;根据水下目标模型得到实际目标数量和各个实际目标的最优坐标。能够高效地对水下多目标进行定位和追踪。
技术研发人员:闫永胜,桂家俊,王海燕,何轲,申晓红,陈梦然
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!