一种UWB测距辅助GNSS动对动基线模糊度固定方法
本发明属于卫星导航定位领域,具体涉及一种uwb测距辅助gnss动对动基线模糊度固定方法。
背景技术:
1、城市智能交通、车辆编队形式、协同定位等应用场景,均需要车辆之间的高精度相对位置。为了解决上述问题,基于uwb(ultra wide band,超宽带)测距的地面定位系统等方案被提出。通过大范围布设uwb地面基站,然后在车辆上布设uwb标签,从而实现车辆的高精度定位,进而实现车辆间的相对位置确定。但这种方式依赖于大范围提前布设的基准站,基础建设成本高。因此,如何有效平衡成本和精度需求,设计一种能够有效提高城市中车辆编队相对定位的方案十分迫切。
2、gnss载波差分相对定位技术在移动载体上安装gnss天线和接收机,并构建通讯数据链,将gnss数据汇总进行载波差分定位解算,通过固定模糊度,可以实现厘米级精度的车辆间的相对位置测定。但在城市复杂环境中,城市高楼、树木等对gnss信号存在遮挡、反射等影响,使得gnss的观测质量不稳定,相对定位解算精度难以保障,严重影响城市中gnss相对定位的应用效能。
3、uwb测距gnss载波差分相对定位技术在移动载体上安装gnss天线、接收机和uwb测距模块,并构建通讯数据链,将gnss数据汇总进行载波差分定位解算,uwb测距值辅助位置参数解算,可以提高车辆间的相对定位精度。然而处理差分观测值实现厘米级相对定位的关键是模糊度得到固定,但该方法中,uwb的测距值未能充分辅助模糊度固定,当解算坐标的初始值精度较差时,还会给观测方程带来误差,当前方法难以避免这一问题。
技术实现思路
1、为解决城市复杂环境中gnss信号在受到遮挡、反射时,基于gnss的相对定位技术难以保证精度,此时无法有效服务于车辆编队成员之间相对定位的问题,以及解决如何利用uwb测距辅助gnss基线模糊度固定,实现车辆间高精度相对定位,改善在卫星数量稀少、伪距多路径误差较大时的gnss动对动相对定位的模糊度固定困难、定位精度低的问题,本发明提供一种uwb测距辅助gnss动对动基线模糊度固定方法,
2、为达到上述目的,本发明采用如下技术方案:
3、一种uwb测距辅助gnss动对动基线模糊度固定方法,包括如下步骤:
4、步骤(1)通过事先动态试验,在开阔环境下利用gnss精确测定的差分基线长度,对uwb测距系统的测距误差和随机误差进行建模分析,确定系统误差模型参数;
5、步骤(2)在使用阶段,对uwb测距值进行实时的系统误差补偿,并且根据系统误差补偿后的uwb测距值的精度水平赋予uwb测距值合适的权重;
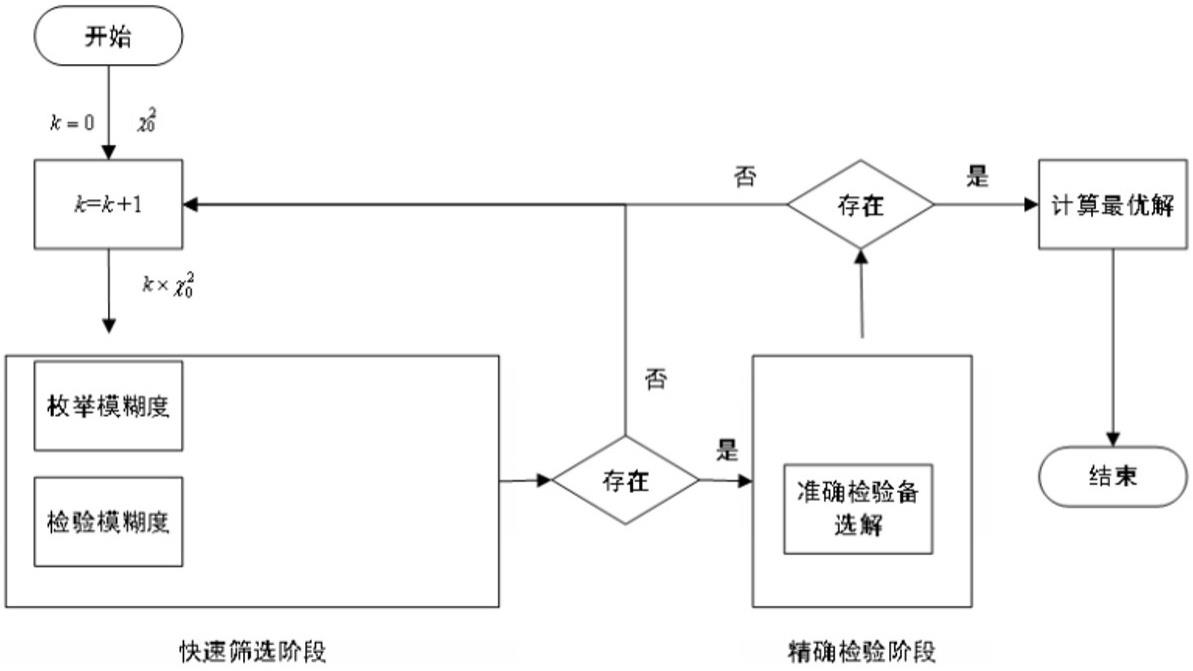
6、步骤(3)采用uwb测距系统测量的时变的基线长度进行gnss基线的双差模糊度求解,辅助模糊度备选解的剔除和判别,实现gnss基线的双差模糊度的快速准确固定,从而得到高精度的基线坐标的模糊度固定解。
7、对比传统的电离层闪烁监测方法,本发明具有以下有益效果:
8、(1)本发明通过滤波估计uwb测距系统偏差,可以提高测距值精度;
9、(2)本发明通过对uwb测距值赋权,能够合理利用uwb测距信息;
10、(3)本发明采用基线长度约束的整数最小二乘模糊度搜索算法,能够严格利用距离约束辅助模糊度搜索,从而使得uwb/gnss组合的相对定位系统能够充分利用观测信息,获得高可靠的解算结果。
技术特征:
1.一种uwb测距辅助gnss动对动基线模糊度固定方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种uwb测距辅助gnss动对动基线模糊度固定方法,其特征在于,所述步骤(1)包括:
3.根据权利要求2所述的一种uwb测距辅助gnss动对动基线模糊度固定方法,其特征在于,所述步骤(2)中,赋予uwb测距值合适的权重包括:
4.根据权利要求3所述的一种uwb测距辅助gnss动对动基线模糊度固定方法,其特征在于,所述步骤(3)中,在车辆实时运动过程中,uwb测距系统实时测量车辆间的距离,并进行uwb测距值的实时误差修正,将实时误差修正后的uwb测距值作为约束信息辅助gnss动对动基线模糊度解算,包括:给出基线长度约束信息以及gnss差分观测信息的观测模型;基于gnss差分观测信息、实时误差修正后的uwb测距值,使用基线长度加权约束的整数最小二乘模糊度搜索方法,求解双差模糊度,并确定基线坐标的模糊度固定解;所述gnss差分观测信息包括双差伪距观测值、双差载波观测值。
5.根据权利要求4所述的一种uwb测距辅助gnss动对动基线模糊度固定方法,其特征在于,所述基于上述gnss差分观测信息、实时误差修正后的uwb测距值,使用基线长度加权约束的整数最小二乘模糊度搜索方法,求解双差模糊度,并确定基线坐标参数的模糊度固定解包括:
技术总结
本发明提供一种UWB测距辅助GNSS动对动基线模糊度固定方法,属于卫星导航定位领域,能够基于UWB测距辅助GNSS基线模糊度固定,实现车辆间高精度相对定位。其中,相对运动的两个车辆上分别安装UWB,UWB测距系统测量车辆与车辆之间的相对距离,即基线长度,利用UWB测量的基线长度辅助GNSS动对动基线的单历元载波模糊度解算,基线长度约束的强度由UWB测距精度决定。本发明能够提高模糊度固定率,从而提高相对定位精度。
技术研发人员:高铭,徐颖,房志博,陈夏兰,袁超,葛建
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!