对象方位角信息确定方法、装置、电子设备及存储介质与流程
本发明涉及雷达,特别涉及一种对象方位角信息确定方法、装置、电子设备及存储介质。
背景技术:
1、随着雷达技术的发展与进步,近年来毫米波雷达被广泛应用于汽车领域,可以准确测量自动驾驶车辆与周围其它物体之间的相对距离、方位、相对速度、运动方向等。
2、雷达主要通过接收天线间的相位关系来测量目标对象的方位角,由于射频链路延迟不一致和天线加工工艺误差等原因会带来一定的相位误差,现有的雷达相位校准方法主要为补偿雷达接收天线间由于馈线间耦合和射频芯片内部带来的相位误差,但无法消除因加工工艺导致的天线几何位置误差引起的相位偏差,直接使用雷达硬件设计的天线位置计算目标对象的方位角时,会在检测大角度目标时会产生较大的误差,从而导致雷达测量方位角的准确性下降,影响自动驾驶车辆的行驶安全性。
技术实现思路
1、针对现有技术的上述问题,本发明公开提供一种对象方位角信息确定方法、装置、电子设备及存储介质,可以确定雷达在多个方位角下的校准系数,进而基于该校准系数对雷达进行校准,能够校准雷达天线几何位置误差引起的接收通道间的相位偏差,从而降低方位角测量误差,提升雷达方位角测量的准确性,进而可以保证自动驾驶车辆的行驶安全。本发明公开的技术方案如下:
2、根据本发明公开实施例的一方面,提供一种对象方位角信息确定方法,包括:
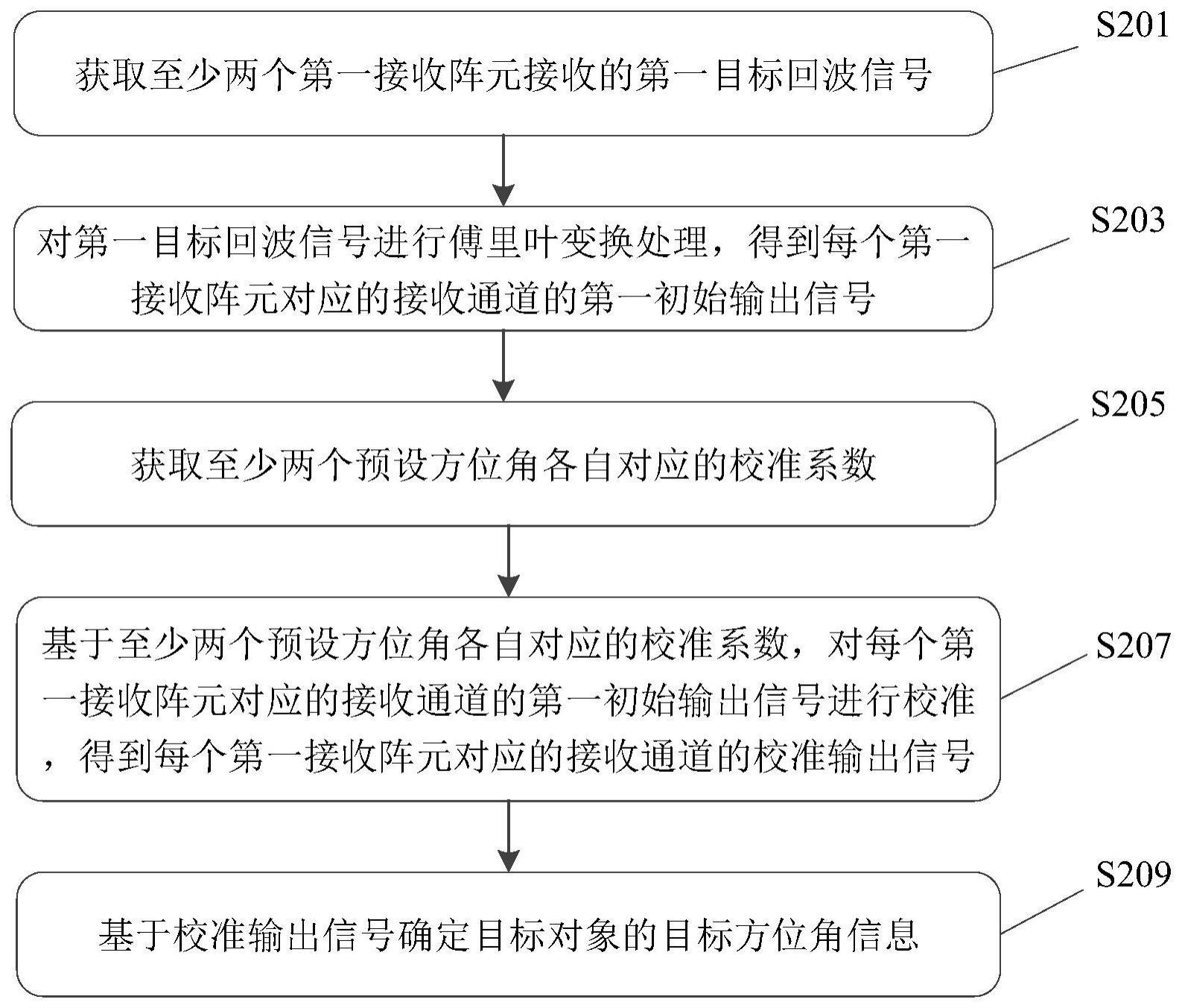
3、获取至少两个第一接收阵元接收的第一目标回波信号,所述第一目标回波信号为由目标对象响应第一发射阵元的发射信号向所述至少两个第一接收阵元发射的回波信号;
4、对所述第一目标回波信号进行傅里叶变换处理,得到每个第一接收阵元对应的接收通道的第一初始输出信号;
5、获取至少两个预设方位角各自对应的校准系数;每个预设方位角对应的校准系数为在所述每个预设方位角下,基于至少两个第二接收阵元间的第一相位差异信息和第二相位差异信息确定的,所述第一相位差异信息与所述第二相位差异信息均基于所述至少两个第二接收阵元接收的第二目标回波信号确定,所述第二目标回波信号为在所述至少两个预设方位角下,由测试对象响应第二发射阵元的发射信号向所述至少两个第二接收阵元发射的回波信号;
6、基于所述至少两个预设方位角各自对应的校准系数,对所述每个第一接收阵元对应的接收通道的第一初始输出信号进行校准,得到所述每个第一接收阵元对应的接收通道的校准输出信号;
7、基于所述校准输出信号确定所述目标对象的目标方位角信息。
8、可选的,所述每个预设方位角对应的校准系数通过以下步骤确定:
9、在所述每个预设方位角下,对所述第一相位差异信息和所述第二相位差异信息间的差异信息进行指数化处理,得到所述每个预设方位角对应的校准系数。
10、可选的,所述基于所述至少两个预设方位角各自对应的校准系数,对所述每个第一接收阵元对应的接收通道的第一初始输出信号进行校准,得到所述每个第一接收阵元对应的接收通道的校准输出信号包括:
11、从所述至少两个预设方位角各自对应的校准系数中确定零度方位角对应的校准系数;
12、基于所述零度方位角对应的校准系数,对所述第一初始输出信号进行校准,得到更新输出信号;
13、对所述更新输出信号进行数字波束形成处理,确定所述目标对象的初始方位角信息;
14、从所述至少两个预设方位角各自对应的校准系数中确定所述初始方位角信息对应的校准系数;
15、基于所述初始方位角信息对应的校准系数,对所述第一初始输出信号进行校准,得到所述校准输出信号。
16、可选的,所述从所述至少两个预设方位角各自对应的校准系数中确定所述初始方位角信息对应的校准系数包括:
17、基于所述初始方位角信息与所述每个预设方位角间的差异信息,从所述至少两个预设方位角中确定近似方位角信息;
18、将所述近似方位角信息对应的校准系数作为所述初始方位角信息对应的校准系数。
19、可选的,所述第一相位差异信息通过以下步骤确定:
20、基于所述每个预设方位角及阵元间距信息,确定在所述每个预设方位角下,每个第二接收阵元与预设接收阵元间的波程差异信息,所述阵元间距信息为所述每个第二接收阵元与所述预设接收阵元间的距离信息;
21、根据所述波程差异信息,确定所述第一相位差异信息。
22、可选的,所述第二相位差异信息通过以下步骤确定:
23、对所述第二目标回波信号进行距离-速度维傅里叶变换处理,得到每个第二接收阵元和预设接收阵元各自对应的接收通道的第二初始输出信号;
24、将所述每个第二接收阵元和所述预设接收阵元各自对应的接收通道的第二初始输出信号间的相位差异信息,作为所述第二相位差异信息。
25、可选的,所述至少两个第二接收阵元接收的第二目标回波信号通过以下步骤获取:
26、在微波暗室内,将测试雷达安装在转台上,在所述测试雷达的预设距离处放置所述测试对象;
27、控制所述转台转动,以使所述测试雷达位于所述至少两个预设方位角下;
28、控制所述测试雷达在所述至少两个预设方位角下,对所述测试对象进行探测,以获取所述至少两个第二接收阵元接收的第二目标回波信号。
29、根据本发明公开实施例的另一方面,提供一种对象方位角信息确定装置,包括:
30、第一获取模块,用于获取至少两个第一接收阵元接收的第一目标回波信号,所述第一目标回波信号为由目标对象响应第一发射阵元的发射信号向所述至少两个第一接收阵元发射的回波信号;
31、傅里叶变换处理模块,用于对所述第一目标回波信号进行傅里叶变换处理,得到每个第一接收阵元对应的接收通道的第一初始输出信号;
32、第二获取模块,用于获取至少两个预设方位角各自对应的校准系数;每个预设方位角对应的校准系数为在所述每个预设方位角下,基于至少两个第二接收阵元间的第一相位差异信息和第二相位差异信息确定的,所述第一相位差异信息与所述第二相位差异信息均基于所述至少两个第二接收阵元接收的第二目标回波信号确定,所述第二目标回波信号为在所述至少两个预设方位角下,由测试对象响应第二发射阵元的发射信号向所述至少两个第二接收阵元发射的回波信号;
33、校准模块,用于基于所述至少两个预设方位角各自对应的校准系数,对所述每个第一接收阵元对应的接收通道的第一初始输出信号进行校准,得到所述每个第一接收阵元对应的接收通道的校准输出信号;
34、目标方位角信息确定模块,用于基于所述校准输出信号确定所述目标对象的目标方位角信息。
35、根据本发明公开实施例的另一方面,提供一种电子设备,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现上述任一项所述的对象方位角信息确定方法。
36、根据本发明公开实施例的另一方面,提供一种计算机可读存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行本发明公开实施例中上述任一项所述的对象方位角信息确定方法。
37、根据本发明公开实施例的另一方面,提供一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行本发明公开实施例中上述任一项所述的对象方位角信息确定方法。
38、本发明提供的数据处理方法,具有如下技术效果:
39、本发明提供的对象方位角信息确定方法,获取目标对象响应发射阵元的发射信号向至少两个第一接收阵元发射的回波信号,并对该回波信号进行傅里叶变换处理,得到每个第一接收阵元对应的接收通道的输出信号,进而基于至少两个预设方位角各自对应的校准系数,对该输出信号进行校准,得到每个第一接收阵元对应的接收通道的校准输出信号,其中,每个预设方位角各自对应的校准系数为测试过程中在每个预设方位角下,基于相位差异信息得到的,相位差异信息基于测试过程中测试对象响应发射阵元的发射信号向至少两个第二接收阵元发射的回波信号确定,从而能够校准雷达天线几何位置误差引起的接收通道间的相位偏差,进而基于校准输出信号确定目标对象的目标方位角信息,能够显著降低方位角测量误差,提升雷达方位角测量的准确性,从而可以保证自动驾驶车辆的行驶安全。
40、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!