一种基于同步三步相移的自由曲面干涉测量系统及方法
本发明涉及光学自由曲面检测技术的领域,设计一种基于同步三步相移的自由曲面干涉测量系统,以及该系统的实现原理和测量方法。
背景技术:
1、光学自由曲面是一类具有非对称旋转特征的复杂曲面,在非成像类别中的应用包括光束整形、照明等,在成像类别中的应用包括头戴式显示器、紫外光刻物镜等。在成像领域中,光学自由曲面的面形质量通常要求亚微米量级,因此需要高精度的加工和检测。目前,针对自由曲面的精密检测技术已开展了广泛研究,其中干涉测量法是目前公认的有效方法之一,其精度通常高于非干涉测量法,可达到nm量级。由于干涉条纹对于振动十分敏感,因此干涉测量法对于测量环境的要求很高,在工厂车间这类环境下工作时需要考虑在保证测量精度的前提下提高系统的抗噪能力。
2、在干涉测量方面,相移干涉测量技术常用于工业检测中,该技术通过多张相移全息图像实现高精度测量,具有较低的噪声水平。其中,基于同步相移的干涉测量技术能够在单次曝光时间内得到多幅干涉图样,有效降低了相移误差和延时误差,具有良好的抗震性和实时性,能够有效抑制工业检测场景中存在的环境扰动。
3、在干涉测量技术中,传统的技术方案常利用多尔(dall)补偿器、奥夫纳(offner)补偿器、谢弗(shafer)补偿器、以及利用计算全息图调制波前等方法去平衡非球面法线像差以实现零位检测。然而这类方法是一对一的检测模式,导致通用性较差,计算全息图虽然补偿能力强,但是针对特殊面型的加工难度和成本较高。为了在保证测试精度的情况下拓展测试方法的动态测量范围,提高测量方法的通用性,提出了部分零位检测法。其中,子孔径拼接法能够提高检测精度和动态测量范围,但是过多的孔径划分限制了检测效率。倾斜波面法在测量时无需改变被测件和干涉仪的相对位置,具有更高的检测效率,但是控制透镜阵列的点源状态操作复杂,并且需要消除大量的回程误差以保证测量精度。
4、可编程零位检测法是近年来一种热门的干涉检测方法,该方法通过slm或微机电系统驱动的微透镜或微反射镜阵列调制任意非球面波前,以实现零位检测,具有极高的灵活性。与微透镜或微反射镜阵列相比,slm的分辨率更高,且光路设计和实际操作更加简易。但是对于非理想的slm设备,其像素不会调制整个入射波,并且由于填充过程中液晶像素的厚度差异会导致不同像素表现出明显的非对称性,导致调制过程存在非线性效应,容易影响测量精度。因此,针对基于slm的可编程零位检测法,仍需研究降低系统误差,提高测量精度的方法。
技术实现思路
1、针对目前技术仍存在的缺陷,本发明提出一种基于同步三步相移的自由曲面干涉测量系统,该系统基于slm实现零位检测法,能够在调制任意波前的同时降低slm引入的系统误差,在具备slm调节任意波前的灵活性的同时,又具有良好的测量精度。
2、本发明的技术方案具体如下:
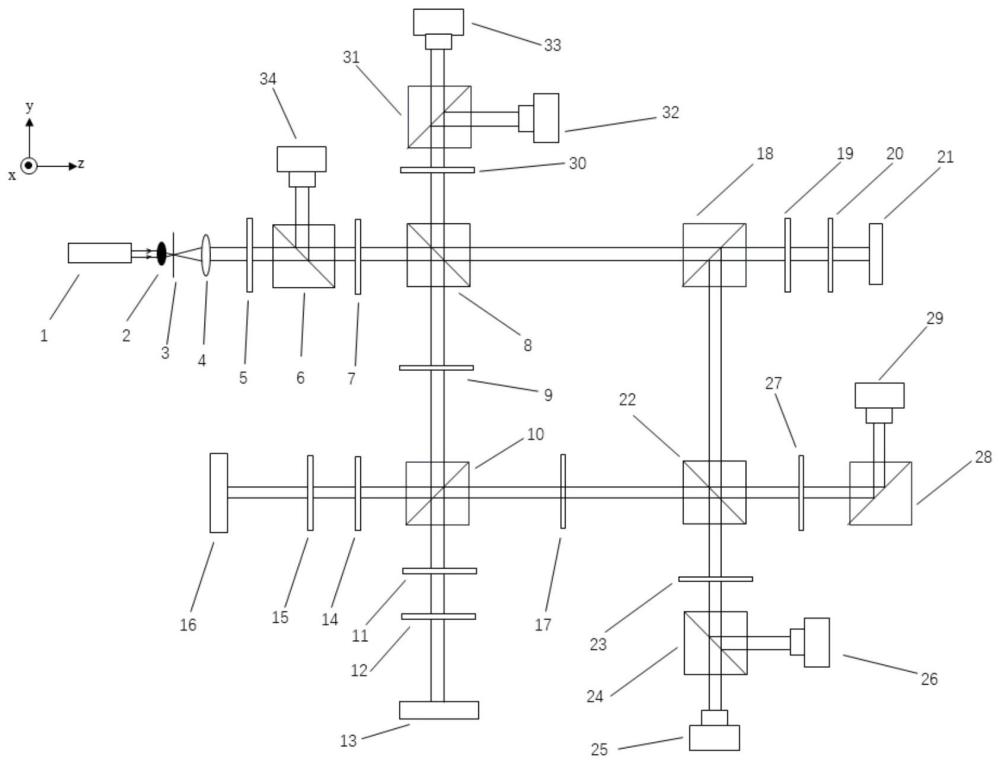
3、一种基于同步三步相移的自由曲面干涉测量系统,其包括本发明涉及一种自由曲面干涉测量系统,该系统以马赫-曾德尔干涉仪和迈克尔逊干涉仪为基础结构,基于可编程零位检测法实现对自由曲面的面形检测,并且能够对空间光调制器(slm)生成的补偿相位进行实时监测,以提高待测自由曲面的检测精度。系统包括:激光器(1)、显微物镜(2)、针孔滤波器(3)、扩束镜(4)、第一偏振片(5)、第一偏振分光棱镜(6)、第一四分之一波片(7)、第二偏振分光棱镜(8)、第二偏振片(9)、第三偏振分光棱镜(10)、第二四分之一波片(11)、第三四分之一波片(12)、待测曲面(13)、第四四分之一波片(14)、第五四分之一波片(15)、标准参考镜(16)、第三偏振片(17)、第一分光棱镜(18)、第六四分之一波片(19)、第四偏振片(20)、空间光调制器(21)、第四偏振分光棱镜(22)、第七四分之一波片(23)、第五偏振分光棱镜(24)、第一ccd相机(25)、第二ccd相机(26)、第八四分之一波片(27)、第六偏振分光棱镜(28)、第三ccd相机(29)、第九四分之一波片(30)、第七偏振分光棱镜(31)、第四ccd相机(32)、第五ccd相机(33)、第六ccd相机(34);
4、系统光路包括slm相位监测光路和自由曲面测量光路;
5、自由曲面测量光路基于零位检测法测量待测曲面,光路如下:激光器(1)的出射光经过显微物镜(2)、针孔滤波器(3)和扩束镜(4)后,形成平行平面光,经过第一偏振片(5)形成水平偏振的偏振光,透射穿过第一偏振分光棱镜(6)后,经过第一四分之一波片(7)形成圆偏振光;圆偏振光经过第二偏振分光棱镜(8)透射后,传播至第一分光棱镜(18)后继续透射,并且经过第六四分之一波片(19)和第四偏振片(20)到达空间光调制器(21),经过空间光调制器(21)反射后沿路返回到第二偏振分光棱镜(8)作为参考光;第一四分之一波片(7)形成的圆偏振光经过第二偏振分光棱镜(8)反射后,经过第二偏振片(9)到达第三偏振分光棱镜(10)后透射,经过第二四分之一波片(11)和第三四分之一波片(12)后到达待测曲面(13),经过待测曲面(13)反射后,沿路返回到第二偏振分光棱镜(8)作为测量光;从激光器出发的参考光和测量光的传播路径与迈克尔逊干涉仪中的传播路径类似;测量光与参考光经过第二偏振分光棱镜发生反射与透射,其中一部分测量光和参考光经过第一四分之一波片(7),然后经过第一偏振分光棱镜(6)反射后,进入第六ccd相机(34)发生干涉;另一部分测量光和参考光经过第九四分之一波片(30)、然后经过第七偏振分光棱镜(31)反射和透射后,进入第四ccd相机(32)和第五ccd相机(33)发生干涉;
6、slm相位监测光路用于实时监测slm生成的补偿相位,光路如下:激光器的出射光经过显微物镜(2)、针孔滤波器(3)和扩束镜(4)后,形成平行平面光,经过第一偏振片(5)形成水平偏振的偏振光,透射穿过第一偏振分光棱镜(6)后,经过第一四分之一波片(7)形成圆偏振光;圆偏振光经过第二偏振分光棱镜(8)透射后,传播至第一分光棱镜(18)后继续透射,并且经过第六四分之一波片(19)和第四偏振片(20)到达空间光调制器(21),经过空间光调制器(21)的反射后,沿路返回至第一分光棱镜(18),第一分光棱镜(18)反射后到达第四偏振分光棱镜(22)作为参考光;第一四分之一波片(7)形成的圆偏振光经过第二偏振分光棱镜(8)反射后,经过第二偏振片(9)到达第三偏振分光棱镜(10)后反射,经过第四四分之一波片(14)和第五四分之一波片(15)到达标准参考镜(16),经过标准参考镜(16)反射后,沿路返回到第三偏振分光棱镜(10)并透射,经过第三偏振片(17)后到达第四偏振分光棱镜(22)作为测量光;从激光器出发的参考光和测量光的传播路径与马赫曾德尔干涉仪中的传播路径类似;测量光与参考光经过第四偏振分光棱镜发生反射和透射,其中一部分测量光和参考光经过第七四分之一波片(23),然后经过第五偏振分光棱镜(24)的反射和透射后,进入第二ccd相机(26)和第一ccd相机(25)发生干涉,另一部分测量光和参考光经过第八四分之一波片(27),然后经过第六偏振分光棱镜(28)的反射后,进入第三ccd相机(29)发生干涉;
7、一种基于多相机同步三步相移的自由曲面干涉测量方法,该方法包括:
8、步骤1:利用第一ccd相机、第二ccd相机、第三ccd相机、第四ccd相机、第五ccd相机和第六ccd相机同时采集6张相移全息图i1、i2、i3、i4、i5、i6;
9、步骤2:根据三步相移相位重建方法,利用i1、i2、i3重建相位具体表达式为:
10、
11、其中,表示slm相位监测光路的重建相位,表示用于加载在slm表面的补偿相位和slm调制过程中由设备引起的相位误差,表示slm相位监测光路中光学元件引入的相位误差;
12、步骤3:根据三步相移相位重建方法,利用i4、i5、i6重建相位具体表达式为:
13、
14、其中,表示自由曲面测量光路的重建相位,表示待测曲面引入的相位,表示自由曲面测量光路光学元件引入的相位误差;
15、步骤4:由于slm相位监测光路和自由曲面测量光路所使用的光学元件一致,因此这两个光路中光学元件引入的相位误差是相同的,即与是相同的,则待测曲面引入的相位根据(1)、(2)得到:
16、
17、步骤5:根据待测曲面引入的相位,计算待测曲面表面的实际相位:
18、
19、其中,是待测曲面实际相位的测量结果。
20、本发明选择slm作为非球面像差的灵活补偿器,结合同步三步相移干涉测量方法,实现了基于可编程零位测量方法的自由曲面干涉测量系统。并且,本发明从两个方面保证了相位重建的精度。一方面该系统能够在测量自由曲面相位的同时,监测slm调制的波前,根据slm相位监测光路的结果实时评估波前调制的准确性,避免因波前调制的误差而影响自由曲面系统的测量结果。另一方面,基于多相机的同步三步相移干涉系统能够同时采集相移干涉图,提高了测量效率的同时有效降低了因环境振动而引起的相移误差。此外,为了保证测量的实时性,本发明提出的系统在slm相位监测光路和自由曲面测量光路中使用相同的光学元件,仅需单次测量多张相移全息图,即可在重建待测曲面的相位的同时消除slm自身设备引入的相位误差和系统光学元件引入的相位误差。
- 还没有人留言评论。精彩留言会获得点赞!