一种冰下脉冲噪声背景下的多目标方位估计方法、系统
本发明属于声纳阵列信号处理,尤其涉及一种冰下脉冲噪声背景下的多目标方位估计方法、系统。
背景技术:
1、由于冰下噪声具有显著的脉冲特征,进行极地冰下多目标方位估计时会受到较频繁的脉冲噪声干扰。脉冲噪声具有很强的非高斯性,统计上表现出较厚的拖尾,且常包含很多的瞬变信号特性。常规的空间谱处理器常用满足高斯分布的噪声进行建模研究,在脉冲噪声下使用可能会出现性能下降的情况,在严重时甚至会引起方位估计失败。因此,需要研究适用于冰下脉冲噪声环境的多目标方位估计方法。
2、在进行声源被动方位估计时,阵列结构同样占有重要地位。均匀线列阵是最常用的一种线型阵列结构,通常采用等阵元间距进行布阵,为避免进行目标探测时产生空间角度模糊,阵元间距通常小于或等于信号波长的一半。由于均匀线列阵的孔径受到阵长的限制,因此如果要增大均匀线列阵的孔径,提高空间分辨能力,就需要增加阵元的个数,这会大大提高阵列的硬件成本。稀疏线阵是一种非均匀布阵的线型阵列,相比于相同孔径的均匀线列阵,稀疏阵列在具有所需阵元数目较少,硬件成本较低,且布阵灵活等优势的同时还可以获得与相同孔径的均匀线列阵相同的空间分辨能力,因此近年来得到了广泛的关注。
3、传统的稀疏阵列处理器具有较高的旁瓣且在脉冲噪声环境下效果较差,故亟需设计一种新的冰下脉冲噪声背景下的多目标方位估计方法。
4、通过上述分析,现有技术存在的问题及缺陷为:
5、(1)常规的空间谱处理器常用满足高斯分布的噪声进行建模研究,在脉冲噪声下使用可能会出现性能下降的情况,在严重时甚至会引起方位估计失败。
6、(2)由于均匀线列阵的孔径受到阵长的限制,果要增大均匀线列阵的孔径,提高空间分辨能力,就需要增加阵元的个数,这会大大提高阵列的硬件成本。
7、(3)传统稀疏阵列处理器具有较高的旁瓣且在脉冲噪声环境下效果较差。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种冰下脉冲噪声背景下的多目标方位估计方法、系统,尤其涉及一种冰下脉冲噪声背景下基于稀疏阵列的多目标方位估计方法、系统,所述技术方案如下:
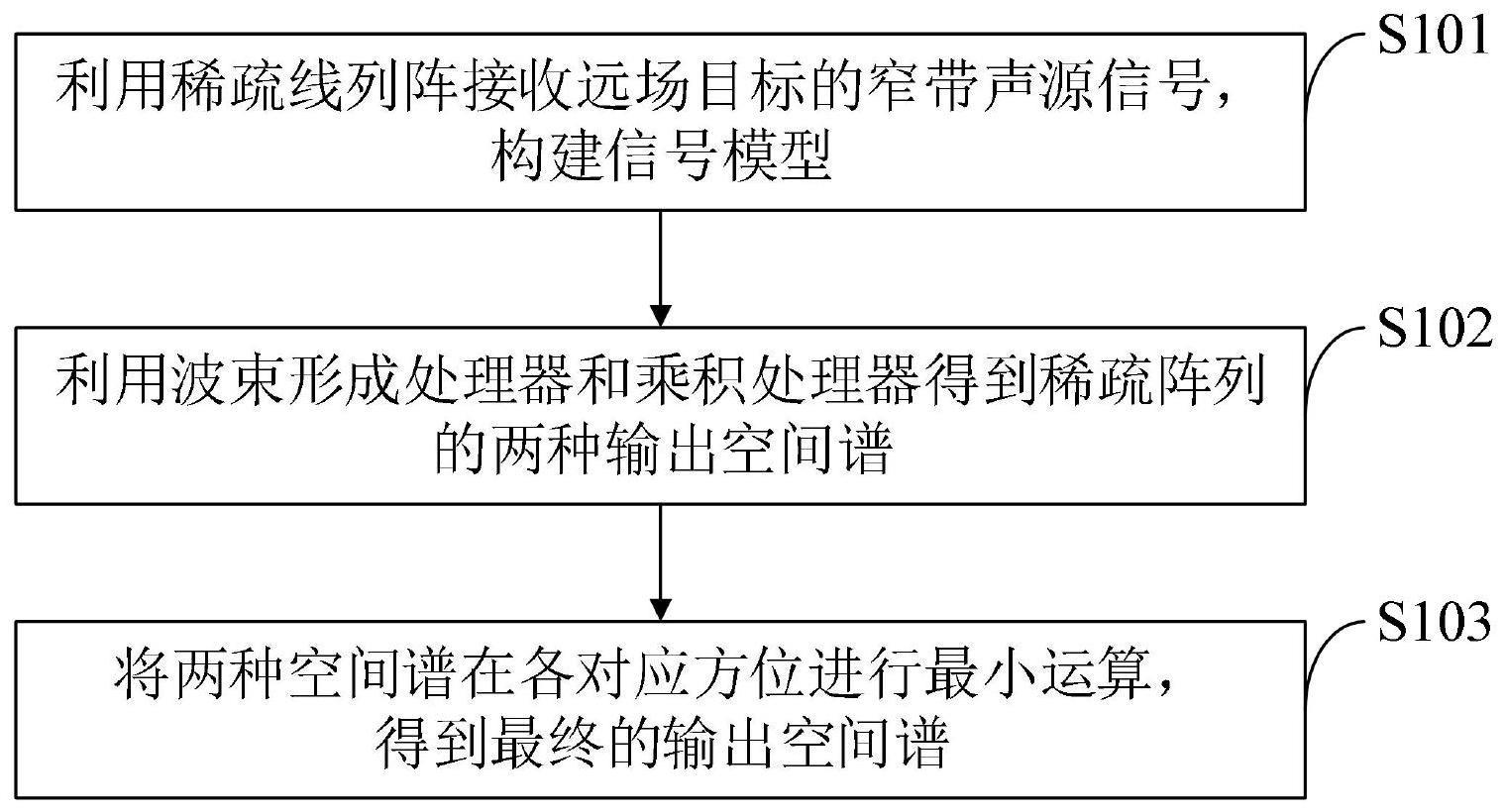
2、本发明是这样实现的,一种冰下脉冲噪声背景下的多目标方位估计方法,具体包括以下步骤:
3、s1,通过稀疏线阵接收远场目标的窄带信号,通过关系式x(t)=a(θ)s(t)+n(t)构建窄带信号模型;
4、s2,通过常规波束形成器对稀疏阵列整体进行处理,得到相应的空间谱;
5、s3,按照经典的乘积处理方法,按照互质阵列或嵌套阵列的组成方式将稀疏阵列分解为两个子阵列,通过乘积处理器对两个子阵列进行相干处理,得到相应的空间谱;
6、s4,对常规波束形成器和乘积处理器输出的空间谱进行最小运算,得到最终的输出空间谱。
7、在步骤s1中,通过稀疏线阵接收远场目标的窄带信号,构建窄带信号模型包括:
8、将n个水听器组成的稀疏阵列放置在一定深度的海水中,接收从不同方向θ=[θ1,θ2,θ3,…,θk]t到达的k个窄带信号,其中[]t代表转置运算;
9、在t时刻,阵列接收信号模型为:
10、x(t)=a(θ)s(t)+n(t);
11、式中,a(θ)=[a(θ1),a(θ2),…,a(θk-1)]为阵列流形矩阵,a(θi)为第i个目标对应的方向向量;s(t)=[s1(t),s2(t),…,sk(t)]t为信号矩阵,sj(t)为第j个目标对应的信号波形;n(t)=[n1(t),n2(t),…,nn(t)]t为噪声矩阵,nm(t)为第m个阵元接收到的噪声分量。
12、进一步,由n个阵元组成的稀疏线阵各阵元坐标位置的集合s表示为:
13、s={m1d,m2d,…,mnd,…,mnd};
14、式中,d为稀疏阵列对应均匀线列阵的阵元间距,mi代表稀疏阵列第i个阵元对应位置上的等效均匀线列阵的阵元数,mnd为稀疏阵列第n个阵元的坐标位置。
15、由于对于角度θi阵列导向向量a(θi)利用下式进行表示:
16、
17、式中,mi代表稀疏阵列第i个阵元对应位置上的等效均匀线列阵的阵元数,τn为第n个阵元接收到的信号相对于参考阵元的时延,c为水中声速,λi为第i个目标的信号波长。
18、在步骤s1中,阵列接收信号的协方差矩阵为:
19、rx=e[x(t)xh(t)]=a(θ)rsah(θ)+rn;
20、其中,t为时间变量,e[]代表取随机变量的均值,[]h代表矩阵共轭转置,rs=e[s(t)sh(t)]为信号的协方差矩阵,rn=e[n(t)nh(t)]为噪声的协方差矩阵;rx由给定m个等时间间隔上得到的阵列接收采样数据估计得到,则估计协方差矩阵rx为:
21、
22、在步骤s2中,基于稀疏阵列的常规波束形成器将稀疏阵列当作一个整体而生成波束以完成空间谱的估计,进而根据峰值的位置判断目标的方位。
23、进一步常规波束形成器的加权向量构造为:
24、
25、式中,(θi为波束形成器对准的角度,mi代表稀疏阵列第i个阵元对应位置上的等效均匀线列阵的阵元数,λi为第i个目标的信号波长。
26、θ方向上输出端的功率表示为:
27、pcbf(θ)=e[|y|2]=w(θ)he[xxh]w(θ);
28、通过常规波束形成器估计得到空间谱表示为:
29、pcbf(θ)=wh(θ)rxw(θ);
30、式中,(θi为波束形成器对准的角度,[]h代表共轭转置,w(θ)为波束形成加权系数,rx阵列接收信号协方差矩阵。
31、在步骤s3中,乘积处理器产生的空间谱由两子阵波束形成后的输出共轭相乘得到,输出空间谱利用下式进行表示:
32、
33、其中,x、w、y分别代表阵列接收信号、权向量和波束形成后的输出信号,下标a和b分别代表稀疏阵列的两个子阵。
34、在步骤s4中,最小值处理器分别选取常规波束形成器和乘积处理器的输出空间谱中的较小值,得到最终的输出空间谱。
35、进一步,产生的空间谱利用下式进行表示:
36、pmp(θ)=min{pcbf(θ),ppp(θ)};
37、由于最小处理器处理对象为常规波束形成器和乘积处理器的空间谱,因此阵增益为二者阵增益的最大值,则:
38、agmp=max{agcbf,agpp};
39、式中,min为取最小运算,max为取最大运算,agcbf为cbf波束形成器的阵增益,agpp为乘积处理器的阵增益。
40、本发明的另一目的在于提供一种冰下脉冲噪声背景下的多目标方位估计系统,该系统用于对所述冰下脉冲噪声背景下的多目标方位估计方法进行调控,该系统包括:
41、阵列信号模型构建模块,用于通过稀疏线阵接收远场目标的窄带声源信号,构建阵列信号模型;
42、稀疏阵列处理模块,用于通过常规波束形成器对稀疏阵列整体进行处理,得到相应的空间谱;
43、输出空间谱计算模块,用于将稀疏阵列分解为两个子阵列,通过乘积处理器对两个子阵列进行相干处理,得到相应的空间谱;
44、空间谱最小运算模块,用于对常规波束形成器和乘积处理器输出的空间谱进行最小运算,得到最终的输出空间谱。
45、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明通过最小处理器融合常规波束形成器和乘积处理器的处理结果,充分利用了稀疏阵列的空间信息,在提高空间分辨能力,保持较高阵列增益的同时降低了旁瓣级且提高了处理器的稳健性,可用于极地冰区脉冲噪声背景下稀疏阵列的空间谱估计问题。本发明融合稀疏阵列整体的空间信息和局部的空间信息,使稀疏阵列空间采样得到的空间信息得到充分利用;相比于传统的稀疏阵列处理器,在提高空间分辨能力,保持较高阵列增益的同时提高多目标方位估计性能;对于极地脉冲噪声环境,阵增益均不低于使用常规波束形成器的相同孔径的均匀线列阵,具有较高稳健性。
46、本方法通过对常规波束形成处理器和乘积处理器处理得到的空间谱进行最小运算,可以充分利用空间信息,在提高主瓣宽度的同时降低旁瓣级且提高处理器在脉冲噪声环境下的性能。相比于传统的稀疏阵列处理器常规波束形成处理器和乘积处理器,本发明可以充分利用稀疏阵列的空间信息,具有更窄的主瓣宽度和更低的旁瓣级,在保证空间分辨能力的同时提高了多目标探测性能;对冰下脉冲噪声环境适应性较好,具有较高的稳健性,可应用于极地脉冲噪声条件下的多目标方位估计。
47、作为本发明的权利要求的创造性辅助证据,还体现在以下几个重要方面:本发明是一种实用的声纳信号处理算法,复杂度低,稳健性高,可用于实际声纳设备的信号处理之中,使得声纳设备可以以更低的成本获得较高的信号处理性能。本发明针对极地脉冲噪声环境下的稀疏阵列探测场景,改进了现存的稀疏阵列最小处理算法,使其在极地脉冲噪声环境下具有更好的性能。本发明所提出的算法在不损失稳健性和阵增益的情况下提高了方位估计算法的阵增益并降低了主瓣宽度。改善了一直以来存在于声纳信号处理当中的高稳健性下方位估计算法的较宽主瓣宽度与较低阵增益的问题。
- 还没有人留言评论。精彩留言会获得点赞!