一种基于共振光的双目被动三维定位装置和方法
本发明涉及光学定位领域,尤其是涉及一种基于共振光的双目被动三维定位装置和方法。
背景技术:
1、近年来,室内定位不仅广泛应用于机场、医院、大型商场、会展中心、大型停车场中,室内定位还为大数据时代下人流导向、个性化购物等服务提供数据基础。现有的室内定位主要有uwb(超带宽)脉冲信号、rfid定位、zigbee室内定位、超声波定位、wi-fi定位等方案。
2、中国专利cn202110825793.0公开了一种基于共振光束的高精度被动定位系统,该系统通过形成谐振腔进行激光定位,然而该系统依赖于红外信号的返回时间进行距离测定,对于传感器精度要求较高,同时光速受到介质影响,在不同天气环境中光速不同,且难以重新测定,影响该系统在不同天气环境中的精度,同时向外部全向发送红外测距信号会产生较大的信号损失,导致准确性较低。
3、因此提出一种能够避免环境因素干扰且无需全向发射红外信号即可实现定位的定位系统是十分重要的。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的易收到环境因素干扰、信号损失较大的缺陷而提供一种基于共振光的双目被动三维定位装置和方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种基于共振光的双目被动三维定位装置,包括第一定位光发射机、第二定位光发射机和定位光接收机,第一定位光发射机用于接收并反射定位光接收机反射的光线,形成第一共振光路,第二定位光发射机用于接收并反射定位光接收机反射的光线,形成第二共振光路,记录第一共振光路和第二共振光路的光斑位置,通过光斑位置计算得到待测目标位置。
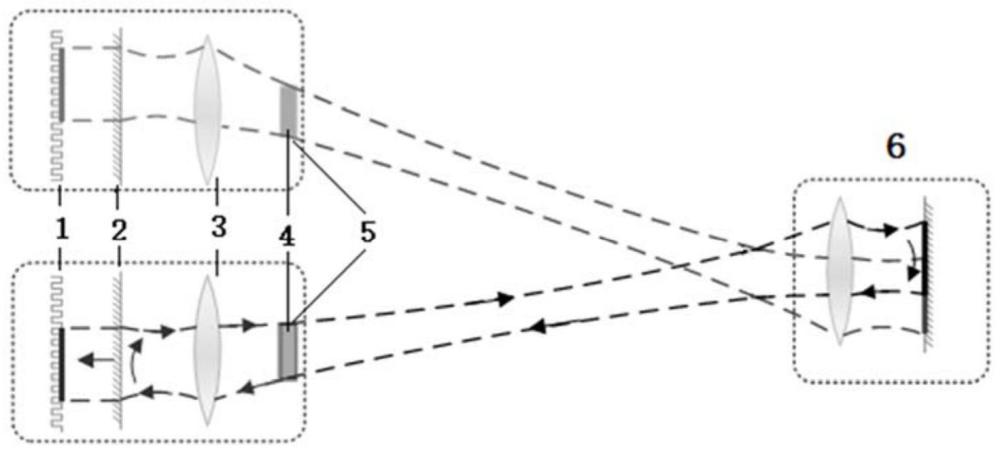
4、进一步地,第一定位光发射机和第二定位光发射机均包含图像传感器、猫眼回复反射器、增益介质和泵浦源,猫眼回复反射器包括平面镜和聚焦透镜,平面镜和聚焦透镜的距离大于聚焦透镜的焦距,增益介质设置在猫眼回复反射器的光瞳处,泵浦源作用在增益介质上,平面镜同时具有反射和透射功能,图像传感器设置在平面镜后方,定位光接收机包含猫眼回复反射器。
5、进一步地,各定位光发射机均包括衰减片,衰减片设置在平面镜和图像传感器之间。
6、进一步地,各定位光发射机均包括滤波器和放大器。
7、进一步地,装置还包括惯性测量单元。
8、进一步地,装置包括多个定位追踪基站和多个定位光接收机,多个定位追踪基站均围绕待测物体设置,多个定位光接收机均设置在待测物体上,且任一定位追踪基站的有效范围内至少有一个对应的定位光接收机。
9、本发明的第二方面,一种基于共振光的双目被动三维定位方法,包括以下步骤:
10、s1:通过各个定位光发射机照射对应的定位光接收机得到各个反射光斑;
11、s2:通过各个定位光发射机的图像传感器采集各个对应的反射光斑的各个光斑入射图像;
12、s3:根据各个光斑入射图像计算各个光斑入射的俯仰角和方位角;
13、s4:根据各个光斑入射的俯仰角和方位角通过双目定位算法进行定位。
14、进一步地,各个光斑入射图像均为亮度分布图。
15、进一步地,入射角度的计算方法包括以下步骤:
16、基于入射图像采用质心法计算光斑的中心坐标,具体计算方法如下:
17、
18、式中,是光斑质心横坐标,是光斑质心纵坐标,dt是在图像传感器上被光斑照亮的灰度图像区域,w(x,y)是质心算法中的加权函数,加权函数计算表达式为:
19、
20、式中,i(x,y)是光斑在在亮度分布图中对应坐标点的亮度,ith为设定的亮度阈值;
21、通过获取图像传感器图像中光斑的位置并计算光斑质心,我们可以估计出谐振光束的入射角度,具体计算方法如下:
22、
23、式中,φ=[θ φ]t为入射角度,θ为俯仰角,φ为方位角,f为猫眼回复反射器中聚焦透镜的焦距。
24、进一步地,双目定位算法具体为:
25、s41:根据第一定位光发射机的图像传感器和第二定位光发射机的图像传感器分别得到第一入射图像和第二入射图像;
26、s42:根据第一入射图像和第二入射图像中的光斑位置得到光斑在第一入射图像和第二入射图像中的二维偏移量;
27、s43:基于第一定位光发射机光瞳和第二定位光发射机光瞳的间距,通过预先设定的相机参数,将二维偏移量转换为实际距离;
28、s44:基于间距、相机参数和实际距离,使用三角测量方法计算目标的实际位置。
29、与现有技术相比,本发明具有以下有益效果:
30、1)本发明基于两个共振光发射机产生的视差和两个共振光发射机之间的距离计算待测目标与测距系统的距离,避免在距离计算过程中受到环境因素干扰。
31、2)本发明基于共振光无线传输系统结构,采用双发射机装置和双目定位算法,同时形成双谐振腔,无需向外部发射全向信号,避免产生信号损失,实现高精度的三维定位追踪功能。
32、3)本发明通过设置衰减片降低输出谐振光束的强度,减少曝光强度,使图像传感器采集的数据更加精确。
33、4)本发明通过设置惯性测量单元,提高对移动状态下的待测物体的测量精确度。
技术特征:
1.一种基于共振光的双目被动三维定位装置,其特征在于,包括第一定位光发射机、第二定位光发射机和定位光接收机(6),所述第一定位光发射机用于接收并反射定位光接收机(6)反射的光线,形成第一共振光路,所述第二定位光发射机用于接收并反射定位光接收机(6)反射的光线,形成第二共振光路,记录第一共振光路和第二共振光路的光斑位置,通过光斑位置计算得到待测目标位置。
2.根据权利要求1所述的一种基于共振光的双目被动三维定位装置,其特征在于,所述第一定位光发射机和第二定位光发射机均包含图像传感器(1)、猫眼回复反射器、增益介质(4)和泵浦源(5),所述猫眼回复反射器包括平面镜(2)和聚焦透镜(3),所述平面镜(2)和聚焦透镜(3)的距离大于聚焦透镜(3)的焦距,所述增益介质(4)设置在猫眼回复反射器的光瞳处,所述泵浦源(5)作用在增益介质(4)上,所述平面镜(2)同时具有反射和透射功能,所述图像传感器(1)设置在平面镜(2)后方,所述定位光接收机(6)包含猫眼回复反射器。
3.根据权利要求1所述的一种基于共振光的双目被动三维定位装置,其特征在于,所述各定位光发射机均包括衰减片(7),所述衰减片(7)设置在平面镜(2)和图像传感器(1)之间。
4.根据权利要求1所述的一种基于共振光的双目被动三维定位装置,其特征在于,所述各定位光发射机均包括滤波器和放大器。
5.根据权利要求1所述的一种基于共振光的双目被动三维定位装置,其特征在于,所述装置还包括惯性测量单元。
6.根据权利要求1所述的一种基于共振光的双目被动三维定位装置,其特征在于,所述装置包括多个定位追踪基站和多个定位光接收机,所述多个定位追踪基站均围绕待测物体设置,所述多个定位光接收机均设置在待测物体上,且任一定位追踪基站的有效范围内至少有一个对应的定位光接收机。
7.一种如权利要求1-6任一所述的基于共振光的双目被动三维定位装置的双目被动三维定位装置方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种基于共振光的双目被动三维定位方法,其特征在于,所述各个光斑入射图像均为亮度分布图。
9.根据权利要求8所述的一种基于共振光的双目被动三维定位方法,其特征在于,所述入射角度的计算方法包括以下步骤:
10.根据权利要求7所述的一种基于共振光的双目被动三维定位方法,其特征在于,所述双目定位算法具体为:
技术总结
本发明涉及一种基于共振光的双目被动三维定位装置,包括第一定位光发射机、第二定位光发射机和定位光接收机,第一定位光发射机用于接收并反射定位光接收机反射的光线,形成第一共振光路,第二定位光发射机用于接收并反射定位光接收机反射的光线,形成第二共振光路,记录第一共振光路和第二共振光路的光斑位置,通过光斑位置计算得到待测目标位置。与现有技术相比,本发明的方法具有避免环境因素干扰、测量结果准确度高、信号损失小等优点。
技术研发人员:刘庆文,徐梦圆,姜清伟,刘明清,韩顺,杜思源,王欣荷
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!