一种确定车道路径的方法、装置及电子设备与流程
本技术涉及智能驾驶,尤其涉及一种确定车道路径的方法、装置及电子设备。
背景技术:
1、智能驾驶是当前各大主机厂推进下一代汽车技术的重点。更可靠,更智能,更流畅的辅助驾驶体验是企业、客户一致追求的目标。
2、目前国内自动驾驶多采用高精地图加定位的模式,由ehp(electric horizonprovider,电子地平线提供者)读取全局高精度地图数据,根据当前车辆位置输出车辆周边局部地图数据,ehr(electronic horizon reconstructor,电子地平线解析者)负责接收ehp输出的车辆周边局部地图数据,将接收到的车辆周边局部地图数据进行解析后重建,生成车辆能够使用的电子地平线信息,在电子地平线信息中,包含当前车辆行驶的道路以及连接道路,还包含车道边线,车道中心线以及其他标识等信息。
3、由于电子地平线信息提供的道路包含多个车道,其中一个车道又可以分离成多个子车道,例如图1,而这些车道都是可以通行的,所以车辆在行驶过程中很容易选错车道,导致行驶路径变长或者最后不能到达目的地。因此,在电子地平线信息提供的道路中提前规划并推荐出能让车辆行驶至目的地的最短路径是必要的。
技术实现思路
1、本技术提供一种确定车道路径的方法、装置及电子设备,用以从多条车道路径中确定出目标车道路径,使车辆能准确到达目的地且行驶路径最短,提高自动驾驶的准确性。
2、第一方面,本技术提供了一种确定车道路径的方法,所述方法包括:
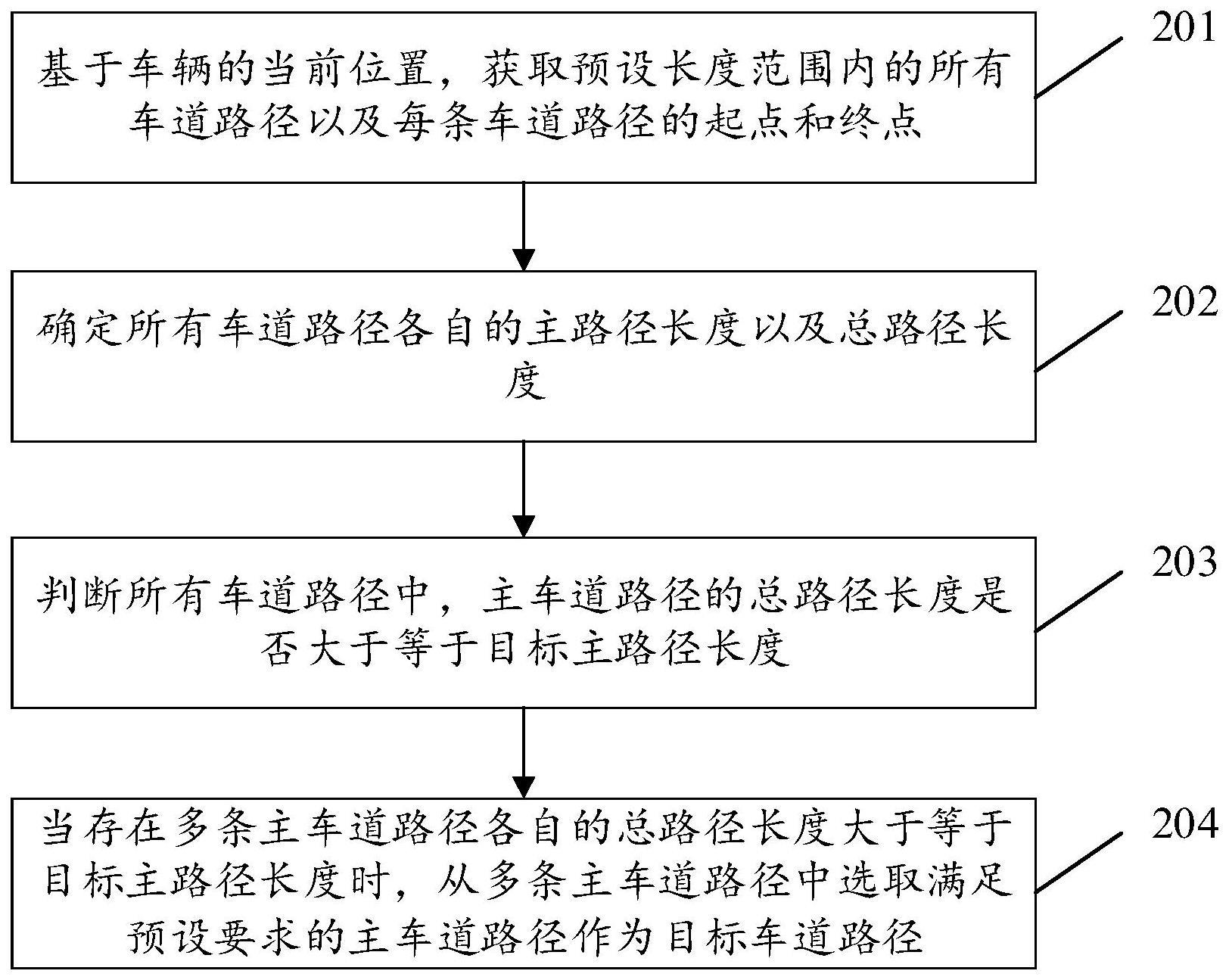
3、基于车辆的当前位置,获取预设长度范围内的所有车道路径以及每条车道路径的起点和终点,其中,所述车道路径由主路径的路径段或子路径的路径段构成;
4、确定所述所有车道路径各自的主路径长度以及总路径长度,其中,所述主路径长度为所述车道路径中包含的所有所述主路径的路径段的长度之和,所述总路径长度为所述车道路径的起点与对应的终点之间的所有路径段的长度之和;
5、判断所述所有车道路径中,主车道路径的总路径长度是否大于等于目标主路径长度,其中,所述主车道路径为终点位于所述主路径的路径段上的车道路径,所述目标主路径长度为所述所有车道路径的主路径长度中长度值最大的主路径长度;
6、当存在多条主车道路径各自的所述总路径长度大于等于所述目标主路径长度时,从所述多条主车道路径中选取满足预设要求的主车道路径作为目标车道路径。
7、在一种可能的设计中,在所述基于车辆的当前位置,获取预设范围内的所有车道路径以及每条车道路径的起点和终点之前,还包括:基于所述车辆的当前位置,获取导航路径中的所述主路径、所述子路径以及所有车道,其中,所述主路径和所述子路径分别由多个路径段构成;根据所述主路径中的路径段以及所述子路径中的路径段,生成位于所述预设长度范围内的所有车道路径。
8、在一种可能的设计中,所述方法还包括:当不存在所述主车道路径的总路径长度大于等于所述目标主路径长度时,从所述所有车道路径中确定出所有子车道路径,所述子车道路径为终点位于所述子路径的路径段上的车道路径;从所述所有子车道路径中,选取所述子车道路径的主路径长度等于所述目标主路径长度的多个第一子车道路径;从所述多个第一子车道路径中,确定出与目标主车道的横向距离最小的第一子车道路径作为所述目标车道路径,其中,所述目标主车道为包含所述目标主路径长度中的最后一个路径段的主车道,所述主车道为后继车道仍包含所述主路径的路径段的车道。
9、在一种可能的设计中,所述从所述多个第一子车道路径中,确定出与目标主车道的横向距离最小的第一子车道路径作为所述目标车道路径包括:获取所述多个第一子车道路径各自对应的编号值和所述目标主车道对应的编号值,其中,所述编号值为按照预设顺序设定的数值;分别计算所述多个第一子车道路径各自对应的编号值与所述目标主车道对应的编号值之间的差值的绝对值,得到多个差值绝对值;从所述多个差值绝对值中选取差值绝对值最小的目标值,将所述目标值对应的第一子车道路径作为所述目标车道路径。
10、第二方面,本技术提供了一种确定车道路径的装置,所述装置包括:
11、获取模块,基于车辆的当前位置,获取预设长度范围内的所有车道路径以及每条车道路径的起点和终点,其中,所述车道路径由主路径的路径段或子路径的路径段构成;
12、确定模块,确定所述所有车道路径各自的主路径长度以及总路径长度,其中,所述主路径长度为所述车道路径中包含的所有所述主路径的路径段的长度之和,所述总路径长度为所述车道路径的起点与对应的终点之间的所有路径段的长度之和;
13、判断模块,判断所述所有车道路径中,主车道路径的总路径长度是否大于等于目标主路径长度,其中,所述主车道路径为终点位于所述主路径的路径段上的车道路径,所述目标主路径长度为所述所有车道路径的主路径长度中长度值最大的主路径长度;
14、选取模块,当存在多条主车道路径各自的所述总路径长度大于等于所述目标主路径长度时,从所述多条主车道路径中选取满足预设要求的主车道路径作为目标车道路径。
15、在一种可能的设计中,该装置还用于:基于所述车辆的当前位置,获取导航路径中的所述主路径、所述子路径以及所有车道,其中,所述主路径和所述子路径分别由多个路径段构成;根据所述主路径中的路径段以及所述子路径中的路径段,生成位于所述预设长度范围内的所有车道路径。
16、在一种可能的设计中,该装置还用于:当不存在所述主车道路径的总路径长度大于等于所述目标主路径长度时,从所述所有车道路径中确定出所有子车道路径,所述子车道路径为终点位于所述子路径的路径段上的车道路径;从所述所有子车道路径中,选取所述子车道路径的主路径长度等于所述目标主路径长度的多个第一子车道路径;从所述多个第一子车道路径中,确定出与目标主车道的横向距离最小的第一子车道路径作为所述目标车道路径,其中,所述目标主车道为包含所述目标主路径长度中的最后一个路径段的主车道,所述主车道为后继车道仍包含所述主路径的路径段的车道。
17、在一种可能的设计中,该装置还用于:获取所述多个第一子车道路径各自对应的编号值和所述目标主车道对应的编号值,其中,所述编号值为按照预设顺序设定的数值;分别计算所述多个第一子车道路径各自对应的编号值与所述目标主车道对应的编号值之间的差值的绝对值,得到多个差值绝对值;从所述多个差值绝对值中选取差值绝对值最小的目标值,将所述目标值对应的第一子车道路径作为所述目标车道路径。
18、第三方面,本技术提供了一种电子设备,所述电子设备包括:
19、存储器,用于存放计算机程序;
20、处理器,用于执行所述存储器上所存放的计算机程序时,实现上述的一种确定车道路径的方法步骤。
21、第四方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述的一种确定车道路径的方法步骤。
22、上述第二方面至第四方面中的各个方面以及各个方面可能达到的技术效果请参照上述针对第一方面或第一方面中的各种可能方案可以达到的技术效果说明,这里不再重复赘述。
- 还没有人留言评论。精彩留言会获得点赞!