集成触觉感知和痛觉反馈的柔性传感器件及其制法和应用
本发明特别涉及一种集成触觉感知和痛觉反馈的柔性传感器件及其制法和应用,属于传感器。
背景技术:
1、仿生柔性传感器通过简单的结构设计来模仿生物体的触觉和痛觉感知功能,广泛应用于可穿戴监测、智慧医疗和智能人机交互等领域。尽管目前在国内外众多科研人员的努力下传感器的关键性能指标,比如灵敏度、检测范围、响应速度等得到了极大的提升,但如何在一种简单的结构配置中同时实现灵敏触觉和痛觉感知的集成,仍然存在巨大的挑战。
2、目前,大多数的研究主要集中于实现单一的触觉或痛觉感知性能。例如cn115560884a报道了一种压力传感器,通过多层平板电容器结构堆叠,提高了触觉检测的分辨率。然而,具有这样一种复杂结构配置的器件无法分辨伤害性的痛觉刺激,大大限制了其实际应用。cn113681585b设计了一种具备人工痛觉的柔性夹爪,包括集成力致变色薄膜和摄像模块的弹性软囊。当外力作用使软囊发生形变时,通过摄像头捕捉颜色变化以检测所受外力的位置和大小,从而实现痛觉感知。由于该装置依赖光学反馈实现感知功能,很容易受到周围环境影响,难以在复杂多变环境中使用。同时,单一的痛觉感知大大限制了该器件在实际使用中的检测能力,无法实现对于常规触感的正常识别。相比于光学响应的感知,基于电学信号反馈的柔性传感器表现出了优异的环境适应性和鲁棒性,并且电信号优异的可读取以及可分析性,大大提升了传感器在复杂环境中对于多刺激因子的感知。
3、尽管现阶段已有研究报道了触觉和痛觉感知集成的柔性传感器,但普遍依赖预设的电信号变化阈值识别触觉和痛觉,这会导致传感器件对于触觉和痛觉的检测能力极大地受到所使用的材料本征导电性的影响。因此,提供一种不依赖于导电材料和不受限于器件尺寸的柔性传感器并实现触觉和痛觉的协同感知具有重大意义。
技术实现思路
1、本发明的主要目的在于提供一种集成触觉感知和痛觉反馈的柔性传感器件及其制法和应用,其集成了常规触觉感知和伤害性痛觉反馈,该柔性传感器仅通过压力刺激下的悬浮式导电结构的弹性形变和双层导电结构的纵向电接触实现触觉和痛觉的协同感知,同时,该双层导电结构的柔性传感器件可以检测低至1.3mg的微弱触觉并具有反向电流突增指示的痛觉感知,实现了不受限于导电材料和器件尺寸的触觉集成的柔性传感器件,从而克服现有技术中的不足。
2、为实现前述发明目的,本发明采用的技术方案包括:
3、本发明一方面提供了一种集成触觉感知和痛觉反馈的柔性传感器件,包括:
4、第一导电结构和第二导电结构,所述第一导电结构和所述第二导电结构沿选定方向间隔设置,至少所述第一导电结构具有弹性,所述第一导电结构能够在受到外力刺激时沿所述选定方向发生机械形变;
5、第一电极、第二电极,所述第一电极与所述第一导电结构电连接,所述第二电极与所述第一导电结构、所述第二导电结构电连接;
6、当所述第一导电结构发生机械形变但与所述第二导电结构电性隔离时,所述第一电极、第一导电结构、所述第二电极形成第一传感器单元,所述第一传感单元能够输出第一信号;当所述第一导电结构发生机械形变且与所述第二导电结构电性接触时,所述第一电极、第一导电结构、所述第二导电结构、所述第二电极形成第二传感器单元,所述第二传感单元能够输出第二信号,所述第一信号和所述第二信号中的一者对应触觉信号、另一者对应痛觉信号。
7、本发明提供的一种集成触觉感知和痛觉反馈的柔性传感器件可以不依赖于导电材料的使用和不受限于器件尺寸的设计,实现触觉和痛觉感知的高效集成,并用于为假肢患者和机器人提供触觉和痛觉协同感知,需要说明的是,柔性传感器件的灵敏度是会受到导电纳米材料分散液和弹性体浓度的影响,此处的“不依赖于导电材料使用”是指在该柔性传感器件中无论采用哪一种导电材料都能产生触觉和痛觉两种信号,因此,该柔性传感器件不受限于导电材料,具有多选择性。
8、进一步的,在所述第二传感器单元中,所述第一导电结构与所述第二导电结构并联。
9、在一较为典型的实施方案中,所述的集成触觉感知和痛觉反馈的柔性传感器件还包括:间隔结构,所述间隔结构沿所述选定方向设置在所述第一导电结构和所述第二导电结构之间,并分别与所述第一导电结构、第二导电结构固定配合,所述第一导电结构和所述第二导电结构被所述间隔结构隔开。
10、进一步的,所述第一导电结构包括第一部分和第二部分,所述第二部分环绕所述第一部分设置,所述间隔结构与所述第二部分配合,所述第一导电结构的第一部分能够在受到外力刺激时与所述第二导电结构电性接触。
11、进一步的,所述间隔结构的高度为100μm~6mm。
12、可以理解的,该间隔结构可以被认为是支撑结构,且该间隔结构需与第一导电结构、第二导电结构中的至少一者是绝缘的,以使第一导电结构和第二导电结构在没有承受外力刺激时是电性隔离的,优选的,该间隔结构为绝缘构件,示例性的,所述间隔结构为橡胶构件。
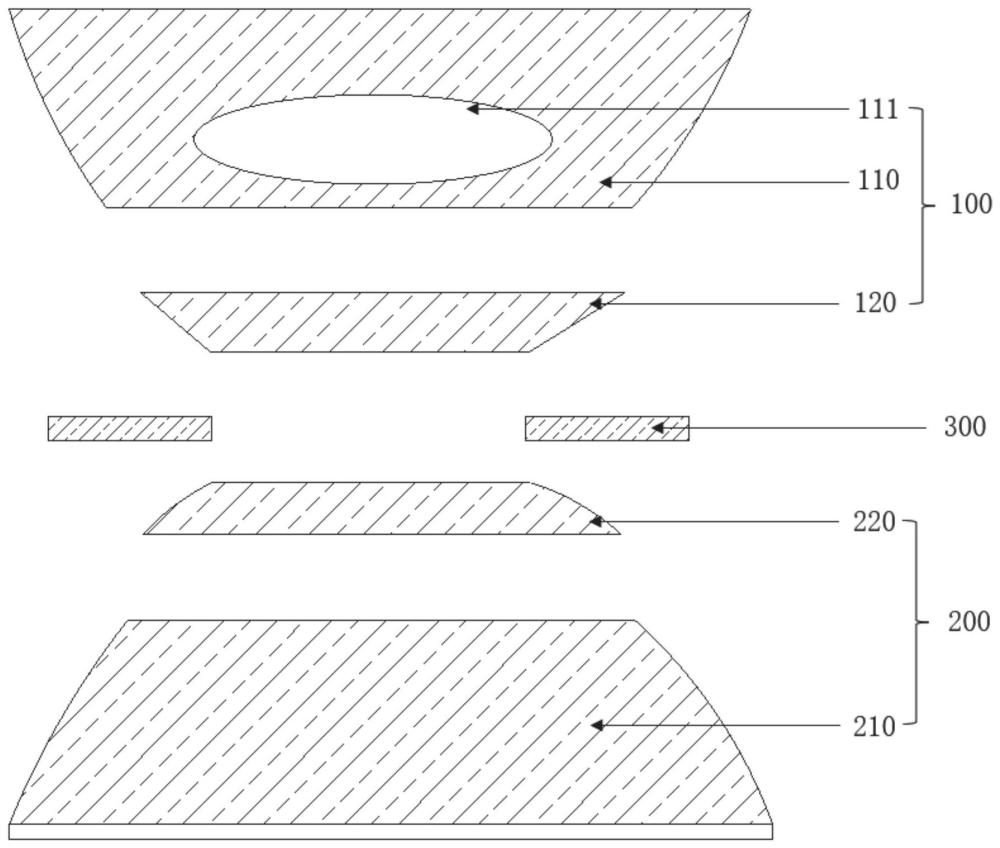
13、在一较为典型的实施方案中,所述第一导电结构包括第一柔性基底和第一导电结构层,所述第一导电结构层设置在所述第一柔性基底上,且所述第一导电结构层位于所述第一柔性基底面向所述第二导电结构的一侧;
14、或者,所述第一导电结构包括第一柔性基底和第一导电结构层,所述第一导电结构层设置在所述第一柔性基底上,其中,所述第一柔性基底上还设置有一避让口,所述第一导电结构层至少覆盖所述避让口,当所述第一导电结构受到外力刺激时,所述第一导电结构层的局部自所述避让口处与所述第二导电结构电性接触。
15、可以理解的,所述第一柔性基底可以是中空或镂空结构,也可以是非中空、镂空结构。
16、进一步的,所述避让口的直径为5~50mm。
17、在一较为典型的实施方案中,所述第二导电结构包括第二柔性基底和第二导电结构层,所述第二导电结构层设置在所述第二柔性基底上,且所述第二导电结构层位于所述第二柔性基底面向所述第一导电结构的一侧。
18、进一步的,所述第二导电结构层包括第二导电薄膜。
19、进一步的,所述第一柔性基底和/或所述第二柔性基底的材质包括聚二甲基硅氧烷(pdms)、聚酰亚胺(pi)、聚对苯二甲酸乙二醇酯(pet)和聚甲基丙烯酸甲酯(pmma)中任意一种或两种以上的组合。
20、进一步的,所述第一导电薄膜和/或所述第二导电薄膜是由导电纳米材料分散液制作形成的。
21、进一步的,所述导电纳米材料分散液中导电纳米材料的浓度为0.1~4mg/ml,以此提高器件的灵敏度。
22、进一步的,所述导电纳米材料包括石墨烯、碳纳米管、碳球、mxene和银纳米线中的任意一种或两种以上的组合。
23、进一步的,所述弹性体是由聚合物预聚液制作形成的。
24、进一步的,所述聚合物预聚液中聚合物前驱体的浓度为0.01~1g/ml。
25、进一步的,所述聚合物前驱体包括铂催化硅橡胶(例如可以是smooth on公司的ecoflextm系列硅橡胶)、聚二甲硅氧烷(pdms)、热塑弹性体(tpe)和聚氨酯(pu)中的任意一种或两种以上的组合。
26、进一步的,所述第一导电结构层可以理解为是由第一导电薄膜和弹性体非对称结合形成的复合导电薄膜,所述第一导电薄膜和所述第二导电薄膜可以是由导电纳米材料分散液在水/气界面自组装形成的,所述弹性体可以是通过聚合物预聚液在第一导电薄膜表面自动铺展形成的。
27、本发明另一方面还提供了一种集成触觉感知和痛觉反馈的柔性传感器件的制备方法,包括:
28、制作第一导电结构的步骤和制作第二导电结构的步骤;
29、将所述第一导电结构、间隔结构以及所述第二导电结构沿选定方向依次设置,所述第一导电结构和所述第二导电结构被所述间隔结构沿所述选定方向隔开,至少所述第一导电结构具有弹性,所述第一导电结构能够在受到外力刺激时沿所述选定方向发生机械形变;
30、制作第一电极和第二电极,且使所述第一电极与所述第一导电结构电连接,所述第二电极与所述第一导电结构、所述第二导电结构电连接;
31、当所述第一导电结构发生机械形变但与所述第二导电结构电性隔离时,所述第一电极、第一导电结构、所述第二电极形成第一传感器单元,所述第一传感单元能够输出第一信号;当所述第一导电结构发生机械形变且与所述第二导电结构电性接触时,所述第一电极、第一导电结构、所述第二导电结构、所述第二电极形成第二传感器单元,所述第一导电结构与所述第二导电结构并联,所述第二传感单元能够输出第二信号。
32、进一步的,所述的制备方法具体包括:
33、提供第一柔性基底,并在所述第一柔性基底的表面形成第一导电结构层,从而形成所述第一导电结构;
34、提供第二柔性基底,并在所述第二柔性基底的表面形成第二导电结构层,从而形成所述第二导电结构;
35、以及,使所述第一导电结构层和所述第二导电结构层能够沿所述选定方向电性接触。
36、进一步的,所述第一导电结构包括第一柔性基底和第一导电结构层,所述第一导电结构层设置在所述第一柔性基底上,所述第二导电结构包括第二柔性基底和第二导电结构层,所述第二导电结构层设置在所述第二柔性基底上,且所述第二导电结构层位于所述第二柔性基底面向所述第一导电结构的一侧。
37、进一步的,所述第一导电结构层包括层叠设置的第一导电薄膜和弹性体,所述第二导电结构层包括第二导电薄膜,并且,所述的制备方法具体包括:
38、将导电纳米材料分散液沉积在水/气界面并自组装形成所述第一导电薄膜或所述第二导电薄膜;
39、将聚合物预聚液铺展在所述第一导电薄膜表面,固化后形成弹性体,从而形成所述第一导电结构层,以所述第二导电薄膜作为第二导电结构层。
40、进一步的,所述导电纳米材料分散液是通过将导电纳米材料超声分散在第一溶剂中形成的,所述第一溶剂包括甲醇、乙醇和异丙醇中的至少一种。
41、进一步的,所述导电纳米材料分散液中导电纳米材料的浓度为0.1~4mg/ml。
42、进一步的,所述导电纳米材料包括石墨烯、碳纳米管、碳球、mxene和银纳米线中的任意一种或两种以上的组合。
43、进一步的,所述聚合物预聚液是通过将聚合物前驱体分散在第二溶剂中形成的,所述第二溶剂包括正己烷、正庚烷、环己烷和丙酮中的至少一种。
44、进一步的,所述聚合物前驱体包括铂催化硅橡胶(例如可以是smooth on公司的ecoflextm系列硅橡胶)、聚二甲硅氧烷(pdms)、热塑弹性体(tpe)和聚氨酯(pu)中的任意一种或两种以上的组合。
45、进一步的,所述聚合物预聚液中聚合物前驱体的浓度为0.01~1g/ml。
46、进一步的,所述第一柔性基底上还设置有一避让口,所述第一导电结构层至少覆盖所述避让口,当所述第一导电结构受到外力刺激时,所述第一导电结构层自所述避让口处与所述第二导电结构电性接触。
47、进一步的,所述避让口的直径为5~50mm。
48、进一步的,所述第一柔性基底和所述第二柔性基底的材质包括聚二甲基硅氧烷(pdms)、聚酰亚胺(pi)、聚对苯二甲酸乙二醇酯(pet)和聚甲基丙烯酸甲酯(pmma)中任意一种或两种以上的组合。
49、进一步的,所述的制备方法还包括:在所述第一导电结构和所述第二导电结构之间设置间隔结构,且使所述第一导电结构和所述第二导电结构被所述间隔结构沿所述选定方向隔开。
50、进一步的,所述第一导电结构包括第一部分和第二部分,所述第二部分环绕所述第一部分设置,所述间隔结构与所述第二部分配合,所述第一导电结构的第一部分能够在受到外力刺激时与所述第二导电结构电性接触。
51、进一步的,所述间隔结构的高度为100μm~6mm,如前文所述,该间隔结构可以是橡胶固件等。
52、在一典型的实施方案中,该集成触觉感知和痛觉反馈的柔性传感器件的制备方法可以包括以下步骤:
53、(1)将导电纳米材料分散液沉积在水/气界面并自组装形成导电薄膜(可以作为前述第一导电薄膜和第二导电薄膜),所述导电纳米材料分散液的沉积方法可以是喷涂或滴涂等,所述沉积速度为5~25ml/min;
54、(2)将聚合物预聚液均匀铺展在第一导电薄膜表面固化形成复合导电薄膜(即前述第一导电结构层),所述聚合物预聚液铺展方法包括滴涂或喷涂等,所述铺展速度为4~20ml/min,所述固化的温度为20~70c,时间为2~10h;
55、(3)在非中空的柔性基底(及前述第二柔性基底)表面转移一层导电薄膜,得到支撑式导电结构(即前述第二导电结构);
56、(4)将复合导电薄膜贴附到中空的柔性基底(即前述第一柔性基底)表面,得到悬浮式弹性导电结构(即前述第一导电结构);
57、(5)使悬浮式弹性导电结构、支撑式导电结构中的导电薄膜侧面对面堆叠并用间隔结构隔开,再在悬浮式弹性导电结构的导电薄膜的两端设置第一电极、第二电极,且使第二电极还同时与支撑式导电结构的导电薄膜电连接,最终得到具有触痛集成的双层柔性传感器件。
58、本发明另一方面还提供了一种可穿戴器件,包括所述的集成触觉感知和痛觉反馈的柔性传感器件。
59、本发明另一方面还提供了一种感知触觉和痛觉的方法,包括:
60、提供所述的集成触觉感知和痛觉反馈的柔性传感器件;
61、将所述第一电极、所述第二电极接入电流检测器件,并对所述第一导电结构施加外力刺激,并以所述电流检测器件采集所述柔性传感器件中的电流,所述第一信号对应为所述电流逐渐减小,所述第二信号对应为所述电流逐渐增大。
62、进一步的,所述第一信号和所述第二信号中的一者对应触觉信号、另一者对应痛觉信号。
63、更进一步的,所述第一信号对应触觉信号,所述第二信号对应痛觉信号。
64、与现有技术相比,本发明的优点包括:
65、1)本发明提供的一种集成触觉感知和痛觉反馈的柔性传感器件,有效地集成了触觉和痛觉感知能力;一方面,悬浮式弹性导电结构具有优异的形变能力,赋予了柔性传感器件灵敏的触觉感知能力,可以检测低至1.3mg的微弱触觉刺激;另一方面,双层结构在纵向的电接触可以实现高达80%的电流反向突增指示痛觉感知。
66、2)本发明提供的一种集成触觉感知和痛觉反馈的柔性传感器件,触觉和痛觉感知的实现依赖于双模式传感机理,触觉感知来源于悬浮式弹性导电结构的机械形变;而痛觉感知来源于双层结构纵向电接触而导致的反向电流突增行为;因此,本发明提供的基于悬浮式和支撑式的双层结构的柔性传感器件可以作为一种普适性器件,通过双模式感知机理,可以不受限于使用的导电材料和器件尺寸来实现触觉和痛觉的协同感知。
67、3)从应用的角度来说,本发明提供的一种集成触觉感知和痛觉反馈的柔性传感器件中材料的选择和器件尺寸具有极大的可设计性,具有优异的多应用场景适应性,可以作为可穿戴式器件为假肢患者和机器人等提供触觉和痛觉反馈。
- 还没有人留言评论。精彩留言会获得点赞!