组合导航系统杆臂值测量方法及相关装置与流程
本发明涉及导航,具体而言,涉及一种组合导航系统杆臂值测量方法及相关装置。
背景技术:
1、在组合导航系统中,杆臂是一个很重要的参数,假设卫星天线与定位设备在运动中相对位置保持不变时,卫星天线相位中心到定位设备相位中心的向量,即为杆臂值,也就是在定位设备坐标系下的坐标。
2、在车载组合导航系统中,例如将惯性导航系统(inertial navigation system,简称:ins)和全球导航卫星系统(global navigation satellite system,简称:gnss)构成的组合。由于ins终端和gnss天线无法安装在同一个位置,所以两者之间存在一个杆臂值,杆臂值在组合导航数据精度统计中非常重要。
3、目前,组合导航系统的杆臂值测量主要采用人工测量方法,测试效率低,而且可能因为ins终端的安装位置与gnss天线安装位置之间存在障碍物导致测量结果不准确,最终将导致导航数据精度较低。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种组合导航系统杆臂值测量方法及相关装置,能够提高组合导航系统杆臂的测量效率和精准度,从而提高组合导航系统的准确性和稳定性。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
3、第一方面,本发明提供一种组合导航系统杆臂值测量方法,所述方法包括:
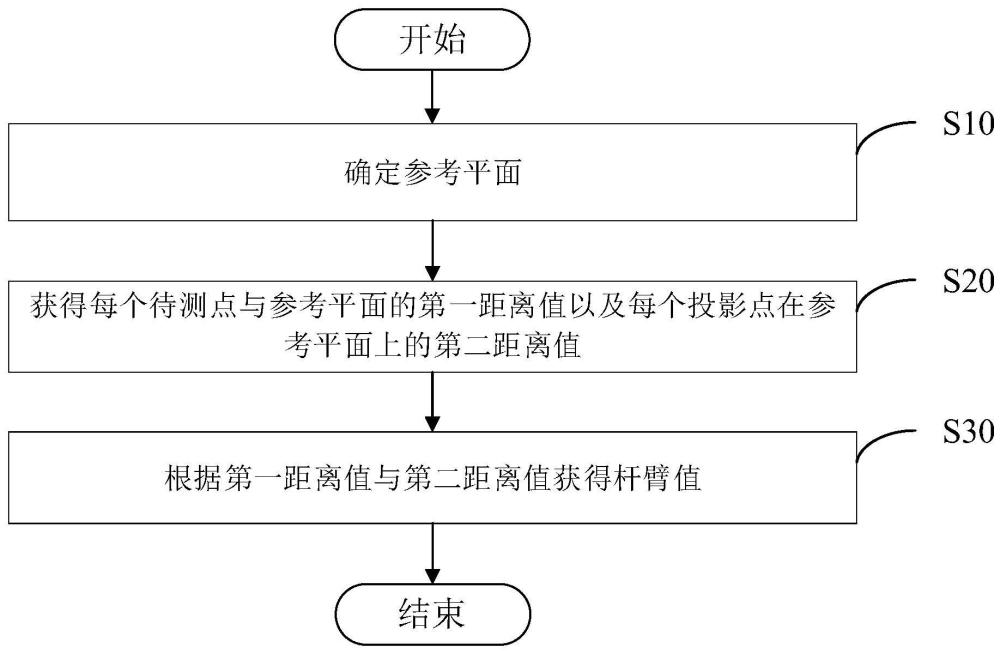
4、确定参考平面;
5、获得每个待测点与所述参考平面的第一距离值以及每个投影点在参考平面上的第二距离值;所述投影点为所述待测点在所述参考平面的对应的投影;所述第二距离值表征所述投影点在所述参考平面的第一方向和第二方向的距离;所述第一方向和所述第二方向在所述参考平面内相互垂直;
6、根据所述第一距离值与所述第二距离值获得杆臂值。
7、在可选的实施方式中,所述待测点包括组合导航系统设备的测量中心a和待测点b,所述获得每个待测点与所述参考平面的第一距离值以及每个投影点在参考平面上的第二距离值,包括:
8、获取第一激光距离s1和第二激光距离s2;所述第一距离值包括所述第一激光距离s1和所述第二激光距离s2;所述第一激光距离s1表征所述组合导航系统设备的测量中心a到所述参考平面的投影点a’的距离;所述第二激光距离s2表征所述待测点b到所述参考平面的投影点b’的距离;
9、获取第三激光距离s3和第四激光距离s4;所述第二距离值包括所述第三激光距离s3和所述第四激光距离s4;所述第三激光距离s3表征投影点a’到基准物的距离;所述第四激光距离s4表征投影点b’到基准物的距离;所述基准物位于投影点a’和投影点b’在所述第一方向和所述第二方向的交点。
10、在可选的实施方式中,当所述组合导航系统设备的测量中心a为汽车后备箱任一点且所述待测点b为汽车车顶任一点时,所述根据所述第一距离值与所述第二距离值获得杆臂值,包括:
11、当所述待测点b在车辆前行方向位于所述组合导航系统设备的测量中心a的右侧时,将杆臂值确定为(s3,s2-s1,s4);
12、当所述待测点b在车辆前行方向位于所述组合导航系统设备的测量中心a的左侧时,将杆臂值确定为(-s3,s2-s1,s4)。
13、在可选的实施方式中,当所述组合导航系统设备的测量中心a为汽车后备箱任一点且所述待测点b为汽车后轮轴中心时,所述根据所述第一距离值与所述第二距离值获得杆臂值,包括:
14、当所述待测点b在车辆前行方向位于所述组合导航系统设备的测量中心a的右侧时,将杆臂值确定为(s4,s2-s1,-s3);
15、当所述待测点b在车辆前行方向位于所述组合导航系统设备的测量中心a的左侧时,将杆臂值确定为(-s4,s2-s1,-s3)。
16、在可选的实施方式中,所述方法还包括:
17、分别获取每个测量设备在水平面的多个倾角;所述测量设备用于测量所述第一距离值和所述第二距离值;
18、根据小于倾角阈值的所述倾角控制对应的所述测量设备处于水平位置。
19、在可选的实施方式中,所述方法还包括:
20、分别获取每个测量设备在同一水平面的多个旋转角度的投影距离;所述测量设备用于测量所述第一距离值和所述第二距离值;
21、比较多个旋转角度的投影距离,得到最短投影距离;
22、根据所述最短投影距离对应的旋转角度控制对应的所述测量设备正对所述参考平面或基准物。
23、第二方面,本发明提供一种组合导航系统杆臂值测量装置,所述装置包括:
24、确定模块,用于确定参考平面;
25、获取模块,用于获得每个待测点与所述参考平面的第一距离值以及每个投影点在参考平面上的第二距离值;所述投影点为所述待测点在所述参考平面的对应的投影;所述第二距离值表征所述投影点在所述参考平面的第一方向和第二方向的距离;所述第一方向和所述第二方向在所述参考平面内相互垂直;
26、处理模块,用于根据所述第一距离值与所述第二距离值获得杆臂值。
27、在可选的实施方式中,所述待测点包括组合导航系统设备的测量中心a和待测点b,所述获取模块用于获取第一激光距离s1和第二激光距离s2;所述第一距离值包括所述第一激光距离s1和所述第二激光距离s2;所述第一激光距离s1表征所述组合导航系统设备的测量中心a到所述参考平面的投影点a’的距离;所述第二激光距离s2表征所述待测点b到所述参考平面的投影点b’的距离;获取第三激光距离s3和第四激光距离s4;所述第二距离值包括所述第三激光距离s3和所述第四激光距离s4;所述第三激光距离s3表征投影点a’到基准物的距离;所述第四激光距离s4表征投影点b’到基准物的距离;所述基准物位于投影点a’和投影点b’在所述第一方向和所述第二方向的交点。
28、第三方面,本发明提供一种电子设备,所述电子设备包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于在调用所述计算机程序时执行如前述实施方式任一项所述的组合导航系统杆臂值测量方法。
29、第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如前述实施方式任一项所述的组合导航系统杆臂值测量方法。
30、相比于现有技术,本发明实施例提供的组合导航系统杆臂值测量方法及相关装置,该方法确定参考平面,获得每个待测点与参考平面的第一距离值以及每个投影点在参考平面上的第二距离值。其中,投影点为待测点在参考平面的对应的投影,第二距离值表征投影点在参考平面的第一方向和第二方向的距离;第一方向和第二方向在参考平面内相互垂直。根据第一距离值与第二距离值获得杆臂值。通过控制测量设备自动测量待测点的投影距离,并根据测量设备发送的投影距离自动获得杆臂值,能够提高组合导航系统杆臂的测量效率和精准度,从而提高组合导航系统的准确性和稳定性。
31、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!