一种负阶跃力发生装置及方法与流程
本发明属于计量测试领域,涉及一种负阶跃力发生装置及方法。
背景技术:
1、为了描述和评定力传感器的动态特性,通常需要采用阶跃响应法进行传感器的动态标定,而产生负阶跃激励信号的装置与方法是阶跃响应法的核心。阶跃响应法通常采用负阶跃激励信号,即预先对传感器施加已知的静载荷,然后突然卸载,从而获得负阶跃响应信号。目前负阶跃力发生装置主要通过两种形式,一是利用脆性材料断裂突然卸荷;二是剪断负载钢丝绳突然卸荷。现有装置存在动态重复性低、传感器安装空间受限、危险性较高等问题,具体表现为:(1)采用破坏传力构件产生负阶跃力形式,产生方式安全保障性低、阶跃力信号重复性差;(2)校准装置对被测传感器尺寸有一定限制,安装空间局促,并且被测传感器结构形式仅为环型或柱型传感器。
技术实现思路
1、本发明的目的是提供一种负阶跃力发生装置及方法,产生负阶跃力的方法简单、波形稳定可靠、信号重复性和动态响应高,适合于多种类型力传感器的动态测试。
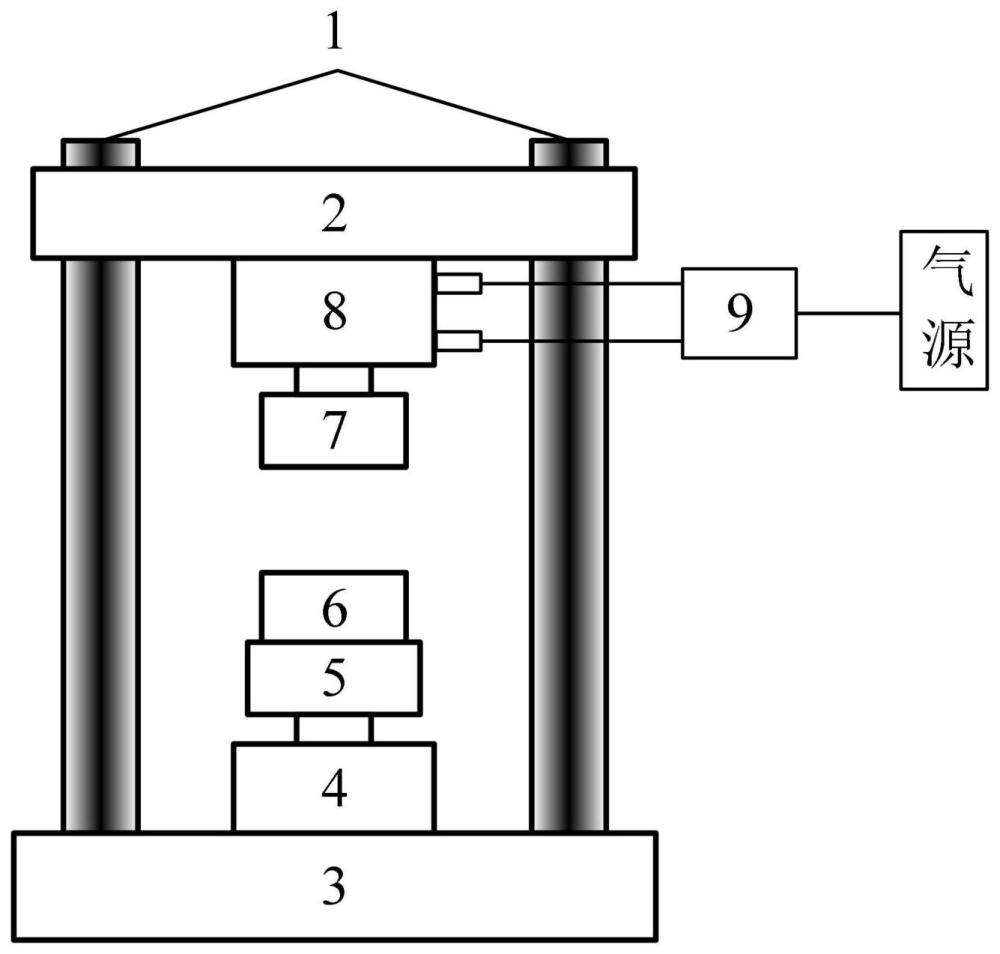
2、为了实现上述目的,本发明的一个方面提供一种负阶跃力发生装置,包括立柱、移动横梁、底座、液压缸、力传感器、托板、施力板、气动缸、电磁阀,
3、移动横梁、底座、液压缸、力传感器、托板、施力板、气动缸安装在同一轴线上;
4、所述立柱是在所述轴线两侧对称安装的双立柱,竖直固定连接在底座上,液压缸固定连接在底座的中间位置,液压缸内部具有能够伸出和收缩的第一活塞杆,第一活塞杆上依次固定安装有力传感器和托板;
5、所述移动横梁安装在立柱的上端,能够进行上下移动和锁止,移动横梁的下方固定安装有气动缸,气动缸内部具有能够伸出和收缩的第二活塞杆,第二活塞杆上固定安装有施力板;
6、被测传感器安装在托板上,托板和施力板之间形成安装被测传感器的安装空间,通过移动横梁的上下移动能够对所述安装空间的高度进行调节;
7、电磁阀与气动缸连接,用于控制气动缸内部的气压大小,从而调节和卸载气动缸对被测传感器施加的推力;
8、所述力传感器用于测量液压缸和气动缸对被测传感器施加的推力。
9、优选地,所述气动缸还具有缸体、活塞和预载弹簧,缸体上设置有进气口和排气口,活塞将缸体内部空间分为有杆腔和无杆腔,活塞杆和预载弹簧固定安装在有杆腔内。
10、优选地,预载弹簧配置为单组,预载弹簧套入活塞杆中,预载弹簧压缩接触安装在活塞与缸体之间。
11、优选地,预载弹簧配置为多组,预载弹簧压缩接触安装在活塞与缸体之间,以活塞杆为中轴线均匀配置。
12、优选地,电磁阀为两位三通电磁阀,电磁阀与气源连接,并与气动缸的进气口和排气口连接,通过控制实现对气动缸有杆腔和无杆腔的充压或泄压过程。
13、本发明的另一个方面提供一种负阶跃力发生方法,利用上述的负阶跃力发生装置产生负阶跃力,包括:
14、步骤一:将被测传感器安装在托板上,调节移动横梁向下移动,使施力板接触被测传感器后,锁止移动横梁;
15、步骤二:开启液压缸、气动缸和电磁阀工作,电磁阀关闭气动缸的排气口、打开气动缸的进气口开始充压,液压缸和气动缸同时向被测传感器施加推力,力传感器测量得到当前力值;
16、步骤三:当力传感器测量的力值达到预定值附近时,停止液压缸施加推力,气动缸继续施加推力,当力值达到预定值时,电磁阀关闭气动缸的进气口停止充压,液压缸、力传感器、托板、被测传感器、施力板、气动缸处于压紧状态,力值保持不变;
17、步骤四:通过电磁阀同时打开气动缸的进气口和排气口,进气口和排气口均开始排气,施力板瞬间脱离与被测传感器接触,被测传感器上加载的力值瞬间被卸载,从而产生负阶跃力。
18、优选地,所产生的负阶跃力值通过液压缸施加的推力与气动缸的进气量的大小进行调节,负阶跃力值的下降时间通过调节气动缸的进气、排气量和更换不同刚度的预载弹簧进行调整。
19、优选地,所述预定力值为35kn。
20、根据本发明上述方面的负阶跃力发生装置及方法,产生负阶跃力的方法简单、波形稳定可靠、信号重复性和动态响应高,适合于多种类型力传感器的动态测试。
技术特征:
1.一种负阶跃力发生装置,其特征在于,包括立柱(1)、移动横梁(2)、底座(3)、液压缸(4)、力传感器(5)、托板(6)、施力板(7)、气动缸(8)、电磁阀(9),
2.如权利要求1所述的负阶跃力发生装置,其特征在于,所述气动缸(8)还具有缸体(11)、活塞(12)和预载弹簧(14),缸体(11)上设置有进气口和排气口,活塞(12)将缸体(11)内部空间分为有杆腔和无杆腔,活塞杆(13)和预载弹簧(14)固定安装在有杆腔内。
3.如权利要求2所述的负阶跃力发生装置,其特征在于,预载弹簧(14)配置为单组,预载弹簧(14)套入第二活塞杆(13)中,预载弹簧(14)压缩接触安装在活塞(12)与缸体(11)之间。
4.如权利要求2所述的负阶跃力发生装置,其特征在于,预载弹簧(14)配置为多组,预载弹簧(14)压缩接触安装在活塞(12)与缸体(11)之间,以第二活塞杆(13)为中轴线均匀配置。
5.如权利要求1-4中任一项所述的负阶跃力发生装置,其特征在于,电磁阀(9)为两位三通电磁阀,电磁阀(9)与气源连接,并与气动缸(8)的进气口和排气口连接,通过控制实现对气动缸(8)有杆腔和无杆腔的充压或泄压过程。
6.一种负阶跃力发生方法,其特征在于,利用权利要求1-5中任一项所述的负阶跃力发生装置产生负阶跃力,包括:
7.如权利要求6所述的负阶跃力发生方法,其特征在于,所产生的负阶跃力值通过液压缸(4)施加的推力与气动缸(8)的进气量的大小进行调节,负阶跃力值的下降时间通过调节气动缸(8)的进气、排气量和更换不同刚度的预载弹簧(14)进行调整。
8.如权利要求6或7所述的负阶跃力发生方法,其特征在于,所述预定力值为35kn。
技术总结
本发明公开了一种负阶跃力发生装置及方法,所述负阶跃力发生装置装置包括立柱、移动横梁、底座、液压缸、力传感器、托板、施力板、气动缸、电磁阀;立柱竖直固定连接在底座上,液压缸固定连接在底座的中间位置,液压缸上依次固定安装有力传感器和托板;移动横梁安装在立柱的上端,能够进行上下移动和锁止,移动横梁的下方固定安装有气动缸,气动缸上固定安装有施力板;被测传感器安装在托板上;电磁阀与气动缸连接,用于控制气动缸内部的气压大小,从而调节和卸载气动缸对被测传感器施加的推力,力传感器测量液压缸和气动缸对被测传感器施加的推力。本发明产生负阶跃力的方法简单、波形稳定可靠、信号重复性和动态响应高。
技术研发人员:李博,秦海峰,尹肖,于翀,王晶露
受保护的技术使用者:中国航空工业集团公司北京长城计量测试技术研究所
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!