一种光栅投影三维测量系统及物体的三维测量方法与流程
本发明涉及物体三维测量,具体涉及一种光栅投影三维测量系统及物体的三维测量方法。
背景技术:
1、光栅投影三维测量技术具有非接触、精度高、速度高、低成本、全场测量等特点。相位计算是光栅投影三维测量的关键步骤,三频四步相移法因为投射12幅条纹,巨大的图像数据量使得相位计算消耗较多时间,拖慢测量的帧频,传统测量方式是上传12幅条纹数据到pc进行计算,对pc的性能要求较高,增加了测量系统的复杂性和成本。
2、为了节省成本,使用fpga+arm的嵌入式处理器结构,传统的光栅投影成像计算方式是用pc处理器进行三维成像的图像计算,但这种嵌入式的arm处理器的766mhz的主频速度远比不上pc处理器速度,限制了图像数据的处理速度,同时光栅投影的12幅图像数据计算量巨大,会进一步增加arm处理器进行包裹相位计算、绝对相位计算和相位展开点云的计算时间,极大的拖慢了三维测量速度,所以如果使用与pc完全相同的三维成像算法进行三维重建会导致测量帧频太低。
3、因此,在光栅投影三维测量时,如何在节省成本的同时,提高计算效率,提高测量帧频,是目前需要解决的问题。
技术实现思路
1、本发明的目的是提出一种光栅投影三维测量系统及物体的三维测量方法,可以在节省成本的同时,提高计算效率,提高测量帧频。
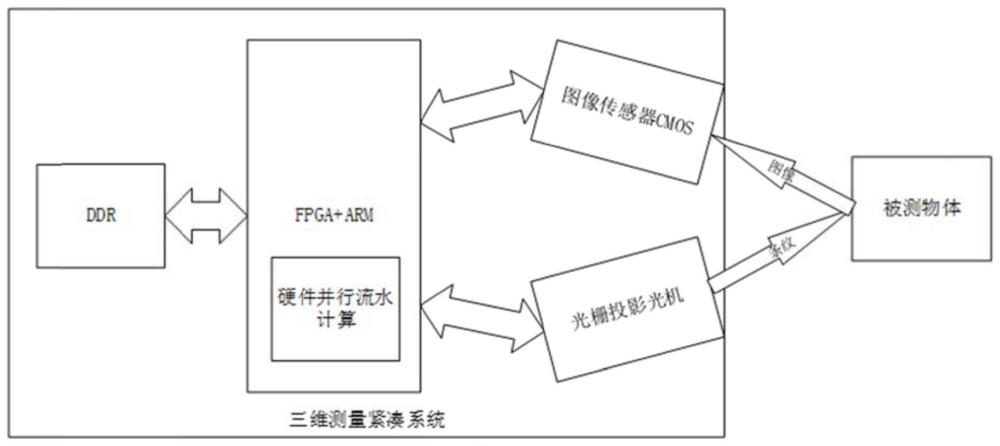
2、为了实现上述目的,本发明提供了一种光栅投影三维测量系统,包括:
3、光栅条纹投影仪、图像采集传感器、图像缓存芯片以及嵌入有arm处理器的fpga;
4、所述光栅条纹投影仪用于向被测物体投射多幅光栅条纹;被测物体的高度对所述光栅条纹进行调制,使光栅条纹发生偏移;
5、所述图像采集传感器用于采集发生偏移后的光栅条纹得到多幅图像;
6、所述fpga中设有硬件并行流水计算模块,用于对所述多幅图像进行包裹相位计算、绝对相位计算和三维展开计算,得出三维点云数据;所述arm处理器对所述三维点云数据进行处理,得到被测物体的尺寸和形状,或者将所述三维点云数据发送至pc;
7、所述图像缓存芯片用于缓存所述多幅图像和所述三维点云数据;
8、所述fpga还用于控制所述光栅条纹投影仪、所述图像采集传感器以及所述图像缓存芯片的工作。
9、可选方案中,所述fpga中设有图像数据接收模块和ddr读写控制模块;
10、所述图像数据接收模块用于接收所述多幅图像;
11、所述ddr读写控制模块用于将所述多幅图像写入到所述图像缓存芯片中以及,当所述多幅图像缓存完成后,将缓存的所述多幅图像从所述图像缓存芯片中读出,送入到所述硬件并行流水计算模块中,以及将所述硬件并行流水计算模块计算后得出的所述三维点云数据写入到所述图像缓存芯片进行缓存。
12、可选方案中,所述光栅条纹投影仪发射3频条纹,每频条纹具有4个相位,共12幅光栅条纹。
13、可选方案中,所述硬件并行流水计算模块包括:
14、三个频率包裹相位计算模块、绝对相位计算模块、畸变矫正模块、三维坐标展开模块、滤波模块、三个数据缓存器;
15、所述三个频率包裹相位计算模块用于并行计算对应频率下的图像的包裹相位;
16、所述绝对相位计算模块基于所述包裹相位计算出绝对相位;
17、所述畸变矫正模块用于对计算出的所述绝对相位进行进行畸变矫正;
18、所述三维坐标展开模块根据标定关系,将所述畸变矫正模块畸变矫正后的绝对相位转换成世界坐标系下的被测物体的三维坐标;
19、所述滤波模块用于对转换出的所述三维坐标进行去噪;
20、所述三个数据缓存器分别用于缓存去噪后的三个维度的坐标。
21、可选方案中,所述图像采集传感器采集到的多幅图像通过四路lvds进入所述fpga;
22、所述fpga中设有四路bitslip模块、四路lvfifo模块以及cmfifo模块;
23、每路所述bitslip模块对应一路所述lvds,用于校准lvds线路上的串行数据位;
24、每路所述lvfifo模块对应一路所述bitslip模块,用于缓存校准后得到的像素数据;
25、当四路所述lvfifo模块中都有数据时,所述cmfifo模块按照所述图像采集传感器的行像素的读出顺序进行排列后对四路所述lvfifo模块中的数据进行缓存。
26、本发明还提供了一种物体的三维测量方法,基于上述的测量系统,所述方法包括:
27、利用光栅条纹投影仪向被测物体投射多幅光栅条纹,被测物体的高度对所述光栅条纹进行调制,使光栅条纹发生偏移;
28、利用图像采集传感器采集发生偏移后的光栅条纹得到多幅图像;
29、利用所述fpga中的硬件并行流水计算模块对所述多幅图像进行包裹相位计算、绝对相位计算和三维展开计算,得出三维点云数据;
30、所述arm处理器对所述三维点云数据进行处理,得到被测物体的尺寸和形状,或者将所述三维点云数据发送至pc。
31、可选方案中,所述包裹相位计算的方法为:
32、将所述多幅图像依次以列像素的大小刷新数据到三个频率包裹相位计算模块,按照串行读取转并行计算的方式同时对三个频率的图像进行包裹相位计算;
33、所述三个频率包裹相位计算模块分别用于计算对应频率下的图像的包裹相位。
34、可选方案中,所述绝对相位计算完成后,所述方法还包括:
35、利用下式对绝对相位计算完成后的数据进行畸变矫正计算:
36、add1=add0+a*728+b
37、其中,add0为当前的绝对相位的地址,add1为根据畸变坐标(a,b)计算出的畸变偏移后的地址,a和b的取值范围为[-18,18],以利用add1处的绝对相位替换当前add0处的绝对相位。
38、可选方案中,所述三维坐标展开计算包括:
39、将三维坐标展开计算中常数之间的加减乘运算分到所述fpga中的arm处理器中进行计算,其余部分的计算分到所述fpga的硬件并行流水计算模块进行计算。
40、可选方案中,所述三维坐标展开模块计算完成后,所述方法还包括:在深度方向上进行m乘m的矩阵滤波;
41、所述矩阵滤波为:在m乘m矩阵内计算中心点到矩阵内其它点之间的距离d1~d(m2-1),若距离dn>p且满足上式的点的个数大于n,则认为此时的中心点为孤立点,将三个维度的坐标都赋值为0,参数p和n为设定值。
42、可选方案中,所述fpga中设有图像数据接收模块和ddr读写控制模块;
43、所述ddr读写控制模块将所述图像数据接收模块中的多幅图像写入到图像缓存芯片时的流程为:
44、先计算第一幅图像的基地址,然后按行顺序写入第一幅图像,第一幅图像写入完毕后计算第二幅图像的基地址,按行写入第二幅图像,直至写入完整的全部图像。
45、可选方案中,所述ddr读写控制模块读取缓存的多幅图像的流程为:
46、按顺序读取缓存的多幅图像和相应的畸变坐标数据,每一个循环只读取一幅图像中的一行数据;
47、读完所有图像和相应的畸变坐标数据后,将读取的图像数据和畸变矫正参数送入硬件并行流水计算模块。
48、本发明的有益效果在于:
49、本发明使用嵌入有arm处理器的板上fpga进行硬件并行流水计算,可大大提高计算效率,提高测量帧频,充当gpu的作用,直接得到被测物体的尺寸和形状,省去pc结构,节省成本,提高测量效率,降低测量系统的结构复杂性,也可以将三维点云数据发送给pc做更复杂运算。
- 还没有人留言评论。精彩留言会获得点赞!