一种深水隧洞巡检机器人水样采集装置的制作方法
本发明涉及水样采集,具体为一种深水隧洞巡检机器人水样采集装置。
背景技术:
1、深水隧洞巡检机器人是一种可以在水下移动,具有视觉和感知系统,通过遥控或者自主操作方式使用机械手包括其它工具,代替或者辅助人工去深水隧洞完成水样采集工作;
2、然而,现有的深水机器人在针对不同深度的水样进行采集时,采用下潜多次对不同深度的水样进行采集,每个对应深度的水样进行采集结束后,取样机器人需要上升到水面,工作人员将取样的水倒出后,再次将取样机器人放入到水中进行取不同深度的水样,不能能够将每次深度的水样取样后进行缓存,整个水样采集过程操作繁杂且取样效率低。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是最接近的现有技术。
技术实现思路
1、本发明的目的在于提供一种深水隧洞巡检机器人水样采集装置,以解决上述背景技术中提出的水样采集机器人不能够对每层的水样取样后进行缓存,需要下潜多次才能够对不同的水样进行采集,采集工作效率低的问题。
2、为实现上述目的,本发明提供如下技术方案:
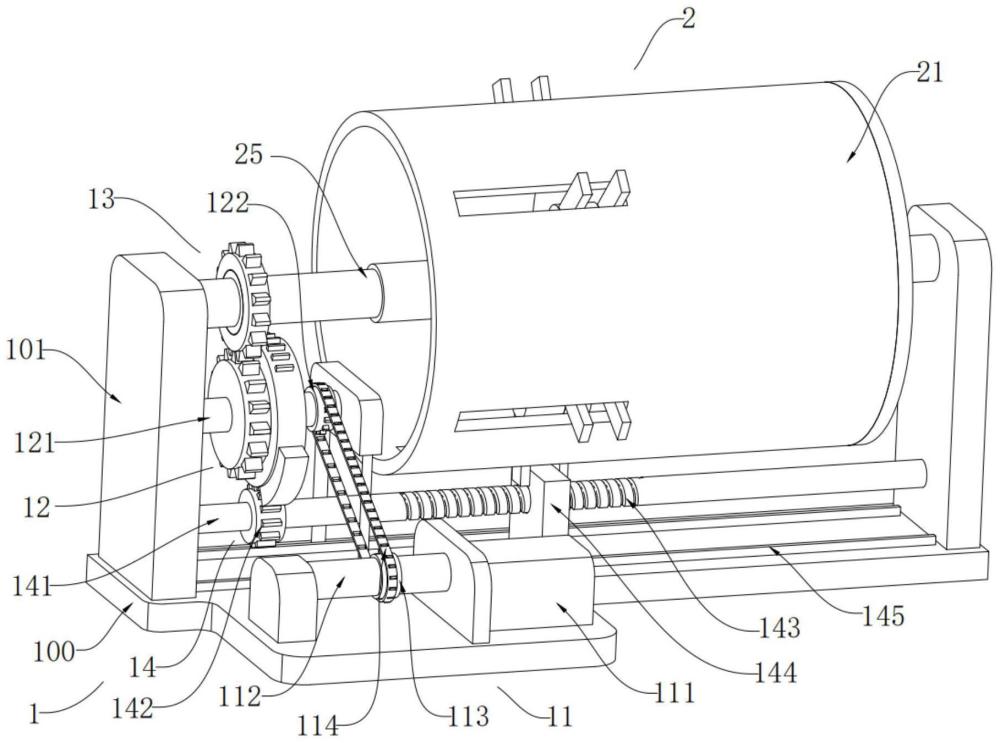
3、一种深水隧洞巡检机器人水样采集装置,包括底板,设于所述底板两侧的支架,还包括:
4、取水单元,转动连接在支架内部用于对水样进行缓存的容纳桶和等角度设于所述容纳桶内部用于对不同深度的水样进行采集的取水管;
5、驱动单元,包括位于所述容纳桶一侧用于对容纳桶转动进行限位的限位组件和设于所述容纳桶下方用于带动取水管取水的推移组件。
6、进一步的,所述取水单元还包括:
7、伸缩杆,滑动插接在所述取水管内部,其一端且位于所述取水管内部连接有活塞件;
8、拉板,固定连接在所述伸缩杆下端,所述拉板外侧且位于所述容纳桶内部设有导槽,用于对拉板移动进行导向;
9、转轴,连接在所述容纳桶一端,用于带动容纳桶转动切换不同的取水管进行取水。
10、进一步的,取水管一端设有进水口;
11、所述容纳桶位于所述进水口一端固定连接有盖板,用于对所述进水口进行固定。
12、进一步的,所述驱动单元还包括:
13、驱动组件,安装在所述底板上端;
14、换向组件,转动连接在所述支架一侧,其外侧与所述驱动组件连接,用于带动推移组件与限位组件进行转动。
15、进一步的,所述驱动组件包括:
16、驱动电机,安装在所述底板上端;
17、驱动轴,转动连接在所述驱动电机内部;
18、第一齿轮,固定套设在所述驱动轴外侧;
19、链条,啮合在所述第一齿轮外侧,用于带动换向组件转动。
20、进一步的,所述换向组件包括:
21、传动轴,转动连接在所述支架内部;
22、第二齿轮,固定套设在所述传动轴外侧,其外侧与所述链条啮合;
23、换向机构,设于所述传动轴外侧,用于带动取水单元取水并换向。
24、进一步的,所述换向机构包括:
25、换向齿轮,固定套设在所述传动轴外侧;
26、第三齿轮,固定套设在所述传动轴外侧且位于所述换向齿轮一侧,所述第三齿轮外侧设有空缺部和与所述空缺部中间的限位板。
27、进一步的,所述限位组件包括:
28、转盘,所述转盘侧部设有凸块;
29、棘齿,转动连接在所述凸块外侧;
30、第四齿轮,设于所述转盘外侧,所述第四齿轮内侧与所述棘齿对应处设有凹槽。
31、进一步的,所述推移组件包括:
32、导向轴,转动连接在所述支架一侧,所述导向轴外侧设有螺纹线;
33、推块,螺纹连接在所述导向轴外侧;
34、第五齿轮,固定套设在所述导向轴外侧,其外侧与所述第三齿轮啮合;
35、导板,连接在所述底板上端且位于所述推块两侧。
36、与现有技术相比,本发明的有益效果是:
37、1、本发明通过驱动轴带动第一齿轮反动,第一齿轮通过链条带动第二齿轮转动,第二齿轮通过传动轴带动换向齿轮转动,换向齿轮通过第四齿轮在凹槽与棘齿的配合作用下带动转盘转动,转盘通过转轴带动容纳桶转动,容纳桶带动取水管转动,此过程第五齿轮与空缺部对应,传动轴不转动,从而达到了对取水管进行自动切换的效果。
38、2、本发明通过链条带动第三齿轮正转,第三齿轮带动第五齿轮带动导向轴转动,导向轴通过螺纹线带动推块沿着导板移动,推块通过拉板带动伸缩杆沿着取水管移动,伸缩杆通过活塞件沿着取水管移动,使得水样由进水口吸入到取水管内进行收集,此过程,换向齿轮带动第四齿轮正转,第四齿轮内部的凹槽与棘齿发生相对转动,使得转轴不发生转动,从而达到了能够自动对不同深度的水样进行采集,并且能够对采集后的水样进行自动缓存,取样效率高的效果。
技术特征:
1.一种深水隧洞巡检机器人水样采集装置,包括底板(100),设于所述底板(100)两侧的支架(101),其特征在于,还包括:
2.根据权利要求1所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
3.根据权利要求2所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
4.根据权利要求1所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
5.根据权利要求4所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
6.根据权利要求5所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
7.根据权利要求6所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
8.根据权利要求7所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
9.根据权利要求8所述的一种深水隧洞巡检机器人水样采集装置,其特征在于:
技术总结
本发明公开了一种深水隧洞巡检机器人水样采集装置,包括底板,设于所述底板两侧的支架,还包括:取水单元,转动连接在支架内部用于对水样进行缓存的容纳桶和等角度设于所述容纳桶内部用于对不同深度的水样进行采集的取水管;驱动单元,包括位于所述容纳桶一侧用于对容纳桶转动进行限位的限位组件和设于所述容纳桶下方用于带动取水管取水的推移组件。通过链条带动第二齿轮转动,第二齿轮通过传动轴带动换向齿轮转动,换向齿轮通过第四齿轮在凹槽与棘齿的配合作用下带动转盘转动,转盘通过转轴带动容纳桶转动,容纳桶带动取水管转动,此过程第五齿轮与空缺部对应,传动轴不转动,从而达到了对取水管进行自动切换的效果。
技术研发人员:闵红平,汤丁丁,蒋睿,黄霞,湛德,刘艳臣,卢仲兴,周艳,夏云峰
受保护的技术使用者:中建三局绿色产业投资有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!