一种水下拉式全回转推进器的推力测量装置和测量方法
本发明涉及推力测量装置,尤其涉及一种水下拉式全回转推进器的推力测量装置和测量方法。
背景技术:
1、水下拉式全回转推进器是一种高效、稳定、多功能、节能的推进器,能够满足现代高性能船舶的所有要求。
2、随着海洋开发的不断深入,水下推进器的应用范围越来越广,其静水推力和巡航状态下的推力是设计的关键参数,由于推进器静水推力通常是基于理论参数估算的,与实际推力存在一定的偏差,因此,准确测得实际环境下推进器的推力具有重要意义。
3、中国专利申请号为cn201721425608.4公开了一种小型水下推进器静水推力测试装置,利用等臂原理,在等臂杠杆另一端的测力计读出了力的数值。中国专利申请号为cn201920429139.6公开了一种水下机器人推进器推力测试装置,采用测力计对螺旋桨的推力进行测试。测力计根据弹簧的形变来测量力的大小,弹簧对力的敏感程度较低,因此使用测力计存在测量结果精确度较差的问题。中国专利申请号为cn202111475061.x公开了一种用于水下推进器推力测试装置,包括固定架,固定架由两根纵梁和三根横梁构成,每个纵梁上均安装有方形座,两个方形座之间转动连接有轴承座,轴承座上穿设有校准杆,校准杆的两端均设有平衡调节杆,轴承座上还设有第一立杆,第一立杆上设有与试下推进器相配合的安装板,位于中间的横梁上设有第二立杆,第二立杆上设有压力传感器。但是该测试装置仅能够测量单方向上的推力。中国专利申请号为cn202210357629.6公开了一种螺旋桨推拉力测量装置及方法,该发明能够根据杠杆原理,基于第一测力计和第二测力计进行力矩平衡计算,在更换推进器时无需重新测量,即可得到螺旋桨的推力或拉力。但是,当测试对象为水下拉式全回转推进器时,上述装置及方法无法准确测量推进器的准确推力大小和方向。
技术实现思路
1、发明目的:针对现有技术中无法对水下拉式全回转推进器的推力大小和方向进行准确测量的不足之处,本发明提出一种水下拉式全回转推进器的推力测量装置和测量方法,使两个拉压力传感器同时受力,实时测得两个方向的推力或拉力,进而计算出水下拉式全回转推进器推力或拉力的实时大小和方向,测量方便,计算误差小。
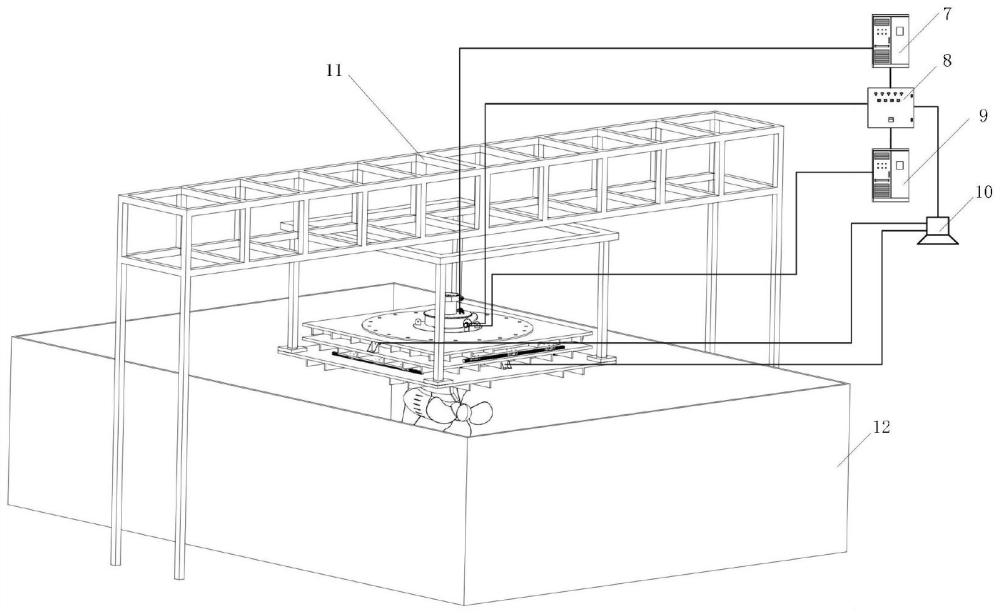
2、技术方案:本发明水下拉式全回转推进器的推力测量装置包括下平台、中平台、上平台、水下拉式全回转推进器、测力装置、上位机、龙门架、水池、主推进电机、转舵电机、中央控制单元和变频柜;
3、水下拉式全回转推进器包括上部回转部件、下部推进器和中部连接部件;
4、下平台与龙门架连接;上平台与中部连接部件连接;
5、下平台包括下层固定平台,下层固定平台上设有第一直线导轨和第一传感器支座;
6、中平台包括中层平台,中层平台上设有第二传感器支座和第二直线导轨;中层平台下方固定有第一滑块和第一拉压力传感器;中层平台通过第一拉压力传感器与第一传感器支座连接;第一滑块沿着第一直线导轨滑动;
7、上平台包括上层连接平台,上层连接平台下方设有第二滑块和第二拉压力传感器,上层连接平台通过第二拉压力传感器与第二传感器支座连接;第二滑块沿着第二直线导轨滑动;
8、主推进电机与转舵电机连接,转舵电机与水下拉式全回转推进器连接。
9、第一直线导轨的方向与第二直线导轨的布设方向垂直。
10、第一拉压力传感器与第二拉压力传感器的布设方向垂直。
11、上层连接平台包括固定板,固定板的底部设有加强筋。
12、变频柜包括主推电机变频柜和转舵电机变频柜。
13、本发明水下拉式全回转推进器的推力测量方法,由水下拉式全回转推进器的推力测量装置来实施,该方法包括以下步骤:
14、(1)将水下拉式全回转推进器安装在测力装置上,测力装置固定在龙门架上,然后将水下拉式全回转推进器放入水池内;将第一拉压力传感器和第二拉压力传感器与上位机连接并校准;
15、(2)通过上位机设定测试参数,所述测试参数包括水下全回转推进器的舵角θ和螺旋桨转速v;
16、(3)上位机将设定的测试指令发送给中央控制单元,测试指令包括水下全回转推进器的舵角θ和螺旋桨转速v设定值,中央控制单元对测试指令进行运算,变频柜根据测试指令控制转舵电机或主推电机的工作状态,使水下拉式全回转推进器(4)按照设定的舵角θ和转速v运行;
17、(4)水下拉式全回转推进器带动中平台和上平台沿着第一直线导轨和第二直线导轨运动,并将推力或拉力传递给第一拉压力传感器和第二拉压力传感器,上位机记录水下拉式全回转推进器的推力或拉力大小f和方向θ';
18、(5)计算并记录水下拉式全回转推进器(4)的推力或拉力的大小和方向,并计算第一拉压力传感器和第二拉压力传感器测得的两个水平方向相互垂直的力;
19、(6)改变水下拉式全回转推进器舵角θ和螺旋桨转速v进行测试。
20、步骤(3)中,中央控制单元对测试指令进行运算,同时输出对应的动作指令给转舵电机变频柜或主推电机变频柜,变频柜根据指令控制转舵电机或主推电机的工作状态,使水下拉式全回转推进器按照设定的舵角θ和转速v运行。
21、步骤(5)中,力的计算公式如下:
22、
23、其中,fx为第一拉压力传感器测得的推力或拉力的大小,fy为第二拉压力传感器测得的推力或拉力的大小,f为水下拉式全回转推进器的实际推力或拉力的大小。
24、步骤(5)中,水下拉式全回转推进器的实际推力方向通过反正切函数计算,公式为:
25、θ'=arctan(fy/fx);
26、其中,θ'为所述水下拉式全回转推进器的实际推力或拉力方向与fx的方向的夹角。
27、步骤(6)的过程为:
28、(6.1)螺旋桨转速v不变,调整水下拉式全回转推进器舵角θ每次顺时针转动θ*后,重复步骤(2)-步骤(5),直至水下拉式全回转推进器舵角θ转动为360°,记录对应的水下拉式全回转推进器的实际推力或拉力f的大小和方向θ';
29、(6.2)将螺旋桨转速v每次增加螺旋桨最大转速的m%后,重复步骤(6.1),直至螺旋桨转速v达到螺旋桨最大转速。
30、有益效果:与现有技术相比,本发明具有以下优点:
31、(1)本发明的水下拉式全回转推进器的推力测量方法使两个拉压力传感器同时受力,实时测得两个方向的推力或拉力;进而计算出水下拉式全回转推进器推力或拉力的实时大小和方向,测量方便、计算误差小。
32、(2)本发明实现了水下拉式全回转推进器的推力的大小和方向的精确测量,便于对水下拉式全回转水下推进器的结构和性能进行改进;且该水下拉式全回转推进器推力测量装置易于安装和维护,适用于各种环境。
技术特征:
1.一种水下拉式全回转推进器的推力测量装置,其特征在于:包括下平台(1)、中平台(2)、上平台(3)、水下拉式全回转推进器(4)、测力装置、上位机(10)、龙门架(11)、水池(12)、主推进电机(5)、转舵电机(6)、中央控制单元(8)和变频柜;
2.根据权利要求1所述的水下拉式全回转推进器的推力测量装置,其特征在于:所述第一直线导轨(1.2)的方向与第二直线导轨(2.2)的布设方向垂直。
3.根据权利要求1所述的水下拉式全回转推进器的推力测量装置,其特征在于:所述第一拉压力传感器(2.5)与第二拉压力传感器(3.3)的布设方向垂直。
4.根据权利要求1所述的水下拉式全回转推进器的推力测量装置,其特征在于:所述上层连接平台(3.1)包括固定板,所述固定板的底部设有加强筋。
5.根据权利要求1所述的水下拉式全回转推进器的推力测量装置,其特征在于:所述变频柜包括主推电机变频柜(7)和转舵电机变频柜(9)。
6.一种水下拉式全回转推进器的推力测量方法,其特征在于:由权利要求1至5所述的水下拉式全回转推进器的推力测量装置来实施,所述方法包括以下步骤:
7.根据权利要求6所述的水下拉式全回转推进器的推力测量方法,其特征在于:步骤(3)中,中央控制单元对测试指令进行运算,同时输出对应的动作指令给转舵电机变频柜或主推电机变频柜,变频柜根据指令控制转舵电机或主推电机的工作状态,使水下拉式全回转推进器(4)按照设定的舵角θ和转速v运行。
8.根据权利要求6所述的水下拉式全回转推进器的推力测量方法,其特征在于:步骤(5)中,力的计算公式如下:
9.根据权利要求6所述的水下拉式全回转推进器的推力测量方法,其特征在于:步骤(5)中,所述水下拉式全回转推进器的实际推力方向通过反正切函数计算,公式为:
10.根据去权利要求6所述的水下拉式全回转推进器的推力测量方法,其特征在于:步骤(6)的过程为:
技术总结
本发明公开了一种水下拉式全回转推进器的推力测量装置和测量方法,测量装置包括下平台、中平台、上平台、水下拉式全回转推进器、测力装置、上位机、龙门架、水池、主推进电机、转舵电机、中央控制单元和变频柜;本发明在测量时,将水下拉式全回转推进器安装在测力装置上,将测力装置固定在龙门架上;水下拉式全回转推进器的带动中平台和上平台沿着第一直线导轨和第二直线导轨运动,并将推力或拉力传递给第一拉压力传感器和第二拉压力传感器,上位机计算第一拉压力传感器和第二拉压力传感器测得的两个水平方向相互垂直的力;改变水下拉式全回转推进器舵角θ和螺旋桨转速v进行测试。本发明实现了水下拉式全回转推进器的推力的大小和方向的精确测量。
技术研发人员:罗晓园,张建,苏世杰,陈巧,史志赛,齐继阳,殷宝吉,陈波,王尧
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!