一种基于关联定位误差信息素的高速无人飞行器集群协同搜索方法
本发明是一种基于关联定位误差信息素的高速无人飞行器集群协同搜索方法,属于无人飞行器。
背景技术:
1、高速无人飞行器是一种采用助推式火箭发动机作为主要动力单元的特殊战术无人机,具有快速响应、精确打击、难以拦截的优点,是现代化作战系统的重要组成部分。从物理结构上讲,相比一般无人机,高速无人飞行器简化了气动面结构,更适用于远距离打击目标,因此也具备飞行速度快,气动性能较差的特性。从数学模型上讲,高速无人飞行器系统内状态量彼此高度耦合,且状态量多于控制量,是典型的欠驱动系统,难以直接应用经典控制手段。以上种种增大了对单架无人飞行器的控制难度。
2、反演控制方法作为一种重要的现代控制手段,通过递归构建闭环系统lyapunov函数获得系统各层级控制律,同时适用于线性和非线性系统,因此在构建高速无人飞行器的单机位置控制律上具备天然的优势。
3、高速无人飞行器的主流应用在于远程制导打击,通过飞行器自身传感器或外部雷达定位等侦察手段确定靶标空间位置,然后控制高速无人飞行器导向靶标,实现对靶标的有效损毁。然而在实际作战场景中,由于敌方干扰和己方传感器精度限制,单个个体难以直接获得满足制导需求的靶标信息,而通过其他侦查手段获得先验空间信息的方法则有可能造成靶标警觉,导致任务失败。因此采用多个高速无人飞行器通过个体间信息交互不断修正制导靶标位置误差,实现对无先验信息靶标的准确逼近,构建高速无人飞行器集群协同搜索系统成为必要的工作。
4、高速无人飞行器集群系统是由具有一定规模的高速无人飞行器有组织地在开放式系统架构下完成作战任务的系统,其以群体智能能力为内核,以网络通信信息为载体,以飞行器间交互协同能力为依托,以个体作战能力为基础,构建生存力高、自主灵活的作战体系。通过密切的协作,高速无人飞行器集群拓展了个体功能,具备更好的智能性和自主能力,是实现协同搜索的基础。
5、目前主流的协同搜索方法包含集中式和分布式。集中式方法应用最优化手段,将搜索问题转化为有约束优化问题,并采用优化方法求解近似最优解。此类方法虽然简单便捷,但是对优化方法性能和实时性提出了很高的要求,且无法在存在传感器误差时实现搜索,是一种离线决策方法。相比之下,分布式方法为并行在线协同决策,采用如模型预测控制、最优态势决策、智能优化等技术,不断修正搜索路径,具备更高的准确性。其中,智能优化手段泛用性强,已在无人机集群搜索领域得到良好应用。
6、自然界中的蚁群具备在未知环境中快速寻找食物的能力,同时总是按照食物和巢穴间的最短距离运动,其关键在于蚂蚁觅食途中留下的信息素。蚁群通过比较各点信息素浓度的差异,可以快速修正群体运动趋势,实现对低价值路线的剪枝,达到集群能量收益最大化。蚁群这一特殊机制催生了信息素搜索方法,能够求解存在复杂空间约束的最短路径选择问题,因此具备应用于协同搜索的潜力。
7、基于上述问题,本发明了一种基于关联定位误差信息素的高速无人飞行器集群协同搜索方法,采用到达角度(angle-of-arrival,aoa)无源测向定位技术获取待定位靶标信息。然后在经典信息素搜索方法基础上,引入协同误差定位和时间信息,构建关联误差的信息素协同搜索方法,生成单机运动策略。设计单机反演位置控制律,实现高速无人飞行器集群对无先验信息靶标的感知、搜索和逼近,拓展高速无人飞行器集群功能,增强作战场地适应性。
技术实现思路
1、1、发明目的:
2、本发明的目的在于提供一种基于关联定位误差信息素的高速无人飞行器集群协同搜索方法。以实现控制高速无人飞行器集群对未知对象的协同定位和逼近,拓展高速无人飞行器功能,提高战场作战能力。
3、2、技术方案:
4、本发明针对高速无人飞行器集群的协同搜索问题,采用aoa无源测向定位技术获取探测对象可能空间位置和定位误差,采用一种仿鸟群的邻域交互技术对飞行器集群进行分组。然后提出了一种关联定位误差的改进信息素协同搜索方法,并采用组内交叉测向定位误差加速信息素收敛,生成单机运动策略。最后设计反演位置控制律控制单机运动,其具体步骤如下:
5、步骤一:构建单机aoa无源测向定位技术
6、首先设计每架飞行器搭载传感器探测方法。考虑待搜索靶标空间方位未知且可能距离极远,采用无源测向定位方法获得位置概率:
7、
8、其中n为参与交叉测向的飞行器数量;exp()代表指数函数;σt为待搜索靶标t的高斯分布方差;ti为组内第i架高速飞行器对待搜索靶标的测量结果;p为待搜索靶标空间可能概率;f(x,y)为关联位置x,y的概率密度,可表示为一误差椭圆如下:
9、
10、其中,(a,b,c,d,e,g)分别为多项式各项的待定系数,可通过待定系数法求解f(x,y)得出;(xt,yt)为误差椭圆圆心,r1,r2分别为误差椭圆长轴和短轴,为误差椭圆长轴朝向,w为计算中间项。对测向结果f(x,y)展开后,可求得误差椭圆各项参数,如下:
11、δ=b2-4ac
12、xt=(2cd-be)/δ
13、yt=(2ae-bd)/δ
14、
15、
16、
17、
18、定义长轴r1为定位误差,用于确定本轮定位精度。
19、步骤二:设计高速无人飞行器反演位置控制律
20、s21、基于过载量控制的无人飞行器模型
21、一般的,无人飞行器的执行机构多为火箭发动机,难以直接进行定速控制。所以经典的内环控制器多选择直接控制各方向。由此考虑三维空间下无人飞行器运动学特点,忽略内环控制器响应时间,可构建如下三自由度模型:
22、
23、vmin≤v≤vmax
24、其中,向量p=[x y h]t表示无人飞行器质心位置,特别的高度h垂直向上为正值;v为飞行器空速量,被限制在速度区间[vmin,vmax]之间;[ψ θ]分别表示无人飞行器的弹道偏角(默认飞行器正向东时为0rad,右偏为正)和弹道倾角默认飞行器水平地面时为0rad,上仰为正);x1=[x y h v ψ θ]t构成模型的初始状态;u=[nx ny nh]t表示无人飞行器过载系数向量,定义为除重力外所有外力的合力相对于重量的比值;g为重力加速度,取值为9.8m/s2。
25、根据公式(4)可知,此系统为典型的非线性系统,其状态量间彼此耦合,难以直接应用常规控制方法。为简化控制过程,考虑进行通道解耦,实现各方向上输入分量与位置分量间的一一对应。
26、s22、三通道解耦反演位置控制律设计
27、为设计反演位置控制器,需要对基于过载量的高速飞行器三态模型进行解耦,获得三个方向上的解耦模型,然后对三个通道的模型分别设计反演位置控制律。暂不考虑对空速v和弹道角[ψ θ]的约束,则可对原始模型(4)进行整理,并设计新的状态向量新状态向量x包含位置量p=(x,y,h)和其一阶导数结合公式(4),获得映射关系:
28、
29、可知此映射及其逆映射均光滑,由此可获得位置量的二阶微分方程,以x方向位置分量为例:
30、
31、其中,为偏导运算符号公式(6)解释了映射(5)在x方向上的具体形式,由此可得到状态量x的微分方程,表示如下:
32、
33、进一步地,可将方程(7)解耦为:
34、
35、
36、
37、其中,x1=x,y1=y,h1=h;向量b1,b2,b3表示如下:
38、
39、b为线性化矩阵。可知此时三个系统均被解耦为三输入单输出的参数严反馈形式,输出量分别为(yx,yy,yh),满足反演控制器构建前提。
40、基于解耦后方程(8),(9),(10),构建单机反演位置控制律。以x通道为例,省略推导过程,可以得到公式如下:
41、
42、其中,xd为x方向期望位置量;z11为输出量yx与xd误差;α1为调和参数;z12为状态量x2与α1间误差。当满足:
43、
44、则lyapunov函数vx2的导数c11,c12为常数项。令c1=min{c11,c12},则即vx2稳定,进而lyapunov函数vx1稳定。此时z11,z12均将指数衰减到0。
45、同理分别对y通道,h通道构建反演控制律。首先构建y通道的反演位置控制律如下:
46、
47、其中,yd为y方向期望位置量;z21为输出量yy与yd误差;α2为调和参数;z22为状态量y2与α2间误差。当满足:
48、
49、其中c21,c22为常数项,令c2=min{c21,c22},则lyapunov函数vy2的导数即此时vy2稳定,进而lyapunov稳定。z21,z22将指数衰减到0。
50、进一步的,构建h通道的反演位置控制律如下:
51、
52、其中,hd为h方向期望位置量;z31为输出量yh与hd误差;α3为调和参数;z32为状态量h2与α3间误差。当满足:
53、
54、其中c31,c32为常数项,令c3=min{c31,c32},则lyapunov函数vh2的导数此时vh2稳定,进而lyapunov稳定。z31,z32将指数衰减到0。
55、s23、三通道系统控制量求解
56、步骤s22获得的三通道反演控制律成立的条件(12)、(14)、(16)均涉及三个输入量[nx,ny,nh],无法单独求解。为此需要联立三个前提条件,构建齐次方程组。最后通过求解齐次方程组得到满足条件的控制量。
57、首先联立三个条件,可得到齐次方程组:
58、
59、其中,系数对角阵c1=diag[c11 c21 c31],c2=diag[c12 c22 c32];实际位置量p=[xy h]t,期望位置量pd=[xd yd hd]t;中间量z1=[z11 z21 z31]t,z2=[z12 z22 z32]t,重力量g=[0 0 -g]t。在计算获得t时刻的状态量x后,求解齐次方程组(17)即可得到t+1时刻的控制量uc,即:
60、
61、步骤三:仿鸟群邻域交互的分组方法
62、欧椋鸟群在集群飞行过程中每次个体只与临近范围内固定数量个体完成交互。欧椋鸟会比较其他个体与自己的距离并排序,选择距离最近的固定数量个体进行交互。如图2所示,对于个体3和个体4,他们各自最近的3个邻居分别是个体2、1、5和1、3、5。在彼此的固定邻居中没有对方,因而可以被分解为两个组。参考这一机制,可以设计仿鸟群邻域交互的无人飞行器分组方法。
63、在搜索初期读取飞行器数量和标靶数量,从而确定分组组数和组内成员数量。若各组无法完成对无人集群的均分,采用余数处理方法将剩下个体随机分配到各组。然后随机选择空间内飞行器个体,计算它与其他个体的距离,并将距离排序。选择最近的期望数量飞行器,并从原集群中剔除出去,它们构成了一个分组。然后对下一组进行同样处理,直到所有的飞行器都完成分组。
64、步骤四:基于关联定位误差的信息素协同搜索方法
65、s41、生成信息素结构
66、当大群蚂蚁处于未知环境中时,会共同探索未知空间、寻找食物,同时彼此之间采用信息素作为通信媒介。信息素的浓度影响整个群体对局部区域的价值判断,吸引整个整体向高价值区域移动。受蚁群依靠信息素觅食这一行为启发,设计基于误差关联信息素的高速无人飞行器搜索协同方法。当二维网格化划分待搜索地图后,高速无人飞行器集群可以视作处于网格化地图上的一群蚂蚁。每个飞行器都具备生成信息素轨迹的能力,如下:
67、
68、其中hkp(t)代表t时刻第k架飞行器在p位置生成的信息素浓度;p是一个二维网格坐标点,通过将地图用边长为q的最小网格分割为m×n个坐标点得到,这些坐标点的横、纵坐标可以分别用xm,yn表示。在t时刻,第k飞行器所有的信息素信息构成了它的信息素轨迹结构hk(t)。
69、s42、避免搜索已知路径的信息素轨迹更新策略
70、信息素搜索方法实现的关键是对信息素轨迹的更新。为了避免经典信息素搜索方法导引下的飞行器出现反复搜索已知路径的现象,设计改进的信息素轨迹更新策略,其公式如下:
71、
72、
73、在公式(20)中,γ是衰减参数,控制在(0,1)之间;r是飞行器的搜索半径;s是当前可实现交互的飞行器成员数量;(xi(t),yi(t))是t时刻集合s内第i架飞行器的位置,(x(t),y(t))是t时刻p位置的网格点。是第i架飞行器信息素结构中p位置的信息素衰减值。当p位置相对集合s内飞行器的距离小于搜索半径r时,就对集合s内的第k架飞行器的在该位置的信息素施加衰减作用。
74、s43、基于时间自适应环境认知的信息素更新策略
75、高速无人飞行器在刚进行搜索时缺乏对环境的先验信息。随着协同搜索过程的进行,它对整个环境的认知会逐渐增加。为了体现这种效应,将对环境的认知与时间尺度做关联,构建如下更新策略:
76、
77、其中,κ是可人为设置的属于(0,1)间的认知能力系数;ω是一个调节因子,用于调节信息素浓度增加的速度。上述公式表明伴随时间的推移,集群对环境的认知能力将逐渐增加,但这种认知能力的增加是有限的:在搜索初期,集群对整体环境的认知程度较弱,但是增长较快;在较长时间尺度后,集群对整体环境的认知程度较高,但是增长速度逐渐趋于饱和。
78、s44、关联定位误差的局部精英领导策略
79、为了增加局部搜索的效率,设计关联定位误差的局部精英领导策略。当局部集合内有一个个体靠近靶标一定位置时,它所处轨迹上的信息素浓度就会增加,促使集合内其他个体向这条轨迹靠近,即通过精英飞行器的信息素轨迹影响局部集合内其他个体。这种影响与aoa无源测向定位误差有关,描述如下:
80、hk(t+1)=hk(t)+ρδhs(t),k∈s
81、
82、
83、其中,ρ∈[0,1]是领导能力系数;集合s内第k个飞行器在t+1时刻的信息素轨迹为hk(t+1);是hk(t+1)上任意网格点信息素浓度,不能超过设定的浓度范围[hmin,hmax]。δhs(t)表示t时刻邻居集合s的信息素结构体更新量。
84、e是根据集合s内aoa无源测向定位获得的误差椭圆长轴r1所确定的定位误差。emax是设置的最大定位误差;在t时刻,当aoa定位误差小于emax时,对邻居集合s内所有个体与定位误差椭圆圆心距离相比较,将位置最近的个体视为精英个体opt。精英opt的信息素结构为hopt(t),对整个集合内个体产生领导作用。但是这种领导作用不是无限制的,随着定位误差e逐渐缩小并接近设定的最小定位误差emin,精英个体opt的领导能力逐渐减弱。当e小于emin后,认为已经能满足定位要求,可以转向搜索别的靶标。
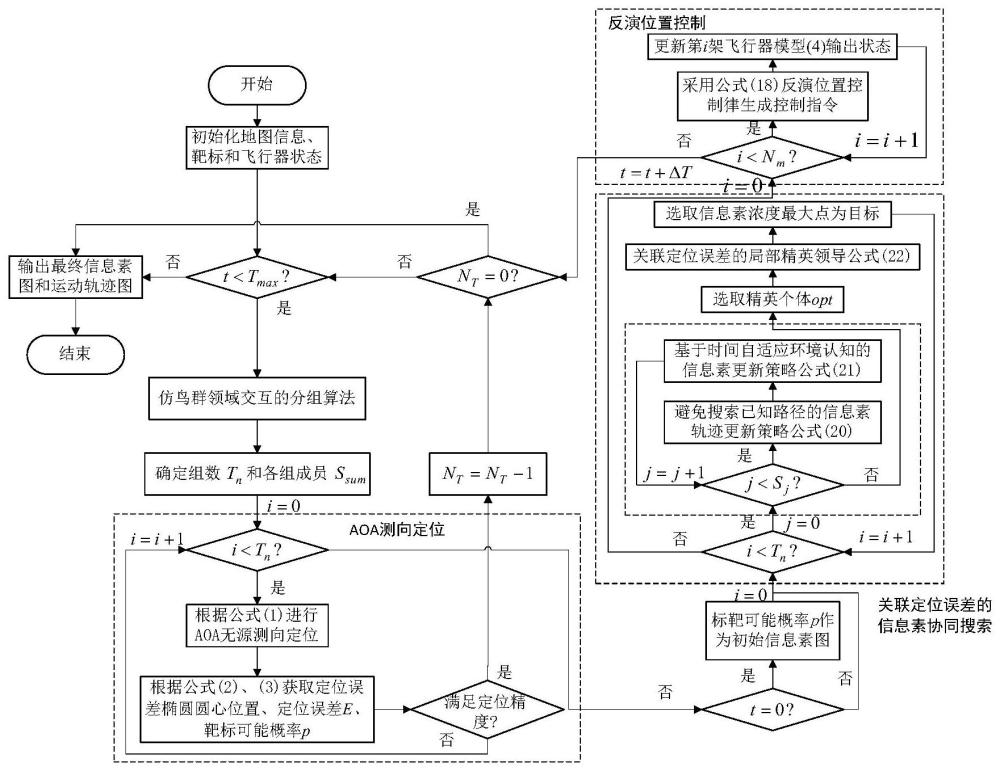
85、步骤五:应用关联误差的信息素方法实现高速无人飞行器集群协同搜索,输出运动轨迹图和最终信息素图
86、s51、无人飞行器集群分组和局部无源测向定位,获得局部定位误差
87、在t=ts(s.t.ts∈(0,tmax])时刻,根据仿鸟群邻域交互的分组方法确定待搜索靶标对应的各个无人飞行器分组每个无人飞行器分组实施aoa无源测向定位,得到定位误差椭圆、定位误差e、待搜索靶标空间可能概率p。若在t=0时,p可用于建立飞行器的初始信息素场。然后用获得的定位误差e与最小定位精度emin相比较。若e小于emin,则认为已经到达最小精度。此时目标数量nt减少。若nt数量减为0,则跳转至步骤s54,程序结束。若不为0,则重新进行步骤s51,进行重分组和测向定位。
88、s52、采用误差关联的信息素搜索方法确定各组内个体运动策略
89、对每个无人飞行器分组s实施步骤四提出的采用关联定位误差的信息素搜索方法,对分组s内每个个体的信息素轨迹(19)依次使用三种更新策略(20)、(21)和(22),更新信息素浓度。对于每个个体,将当前信息素轨迹内信息素浓度最大点作为t=ts+δt时刻期望运动位置[xd(ts),yd(ts)],输入到各自的反演控制器。
90、s53、将各组内个体运动策略输入反演控制器,控制个体在二维平面运动由于飞行器只在二维平面进行搜索,所以设置单机的期望高度hd始终不变,为t=0时刻高度,从而获得期望位置向量pd(ts+δt),并计算pd(ts+δt)一阶导和二阶导数。然后读取无人飞行器状态x1(ts)用于生成线性化矩阵b(ts)、中间量矩阵z1(ts)和z2(ts)。最后根据控制量公式(18)生成得到ts+δt时刻控制量uc(ts+δt),用于控制模型(4),生成模型运动状态x1(ts+δt)。在所有个体状态完成更新后,记录各个体运动状态x1(ts+δt)和信息素图h(ts+δt)到对应的运动状态记录结构体数组xr=[x1(0),x1(δt),x1(2δt),....,x1(ts+δt)]。在完成更新后,将各组的信息素地图相互叠加,结果保存至整体信息素记录结构体h=[h(0),h(δt),h(2δt),...,h(ts+δt)]。
91、s54、判断是否到达方法结束条件
92、在所有个体都完成更新后,判断待搜索靶标数量nt是否为0。若nt不为0,则判断ts+δt是否达到最大仿真时长tmax。若未达到,则程序正常进行。此时t=t+δt,本轮仿真结束,跳转至步骤s51。重复以上过程,不断重复,直到达到最大仿真时长tmax或靶标数量nt为0。此时仿真环节结束,跳转至步骤s55。
93、s55、输出运动轨迹图和最终信息素图
94、输出运动轨迹图,根据初始设置生成最小网格边长为q的m×n网格地图;根据初始靶标状态xt绘制待搜索靶标,并用紫色圆点表示。在此基础上,根据各个体运动记录结构体数组xr中三维位置分量p生成对应运动轨迹,用绿线绘制。最后根据xr最后位置分量生成各飞行器最终位置。对于最终信息素图,在生成三维地图后,根据整体信息素记录结构体h在各网格处的信息素浓度,绘制最终信息素图,用蓝色网格线表示。
95、整体流程图参考图3。
96、本发明提出的一种基于关联定位误差信息素的高速无人飞行器集群协同搜索方法,其优点和功效在于:一、提供了高速无人飞行器集群在缺少先验信息场景下实现协同搜索定位的方法,拓展了高速无人飞行器集群应用场合,增强了作战场地适应性。二、针对基于过载量的三自由模型,设计了反演位置控制率,实现了对非线性飞行器模型的准确位置控制。三、提出一种关联定位误差的改进信息素搜索方法,将信息素更新策略和定位误差相关联,同时引入多种改进策略加速方法收敛。
- 还没有人留言评论。精彩留言会获得点赞!