一种引水隧洞内表面检测装置和方法与流程
本发明涉及水利水电工程,特别涉及一种引水隧洞内表面检测装置和方法。
背景技术:
1、目前大多数对引水隧洞的检测方式采用人工排查或者预埋传感器的检测方式。人工检测需要通过提前放空水,由人员进入隧洞内部对表面裂缝、隧洞变形等进行人工检修,放水方式排空隧洞不但周期长,影响输调水调配效率,而且会对隧洞的抗压性能造成影响,人工检测效率低、对隧洞的微型变形无法捕捉。
技术实现思路
1、针对现有技术的不足,本发明提供了一种引水隧洞内表面检测装置和方法,解决了现有引水隧洞内表面监测领域中人工检测造成的损坏内壁压力平衡、检测效率低、对隧洞的微型变形无法捕捉的技术问题。
2、本发明通过以下技术方案实现:
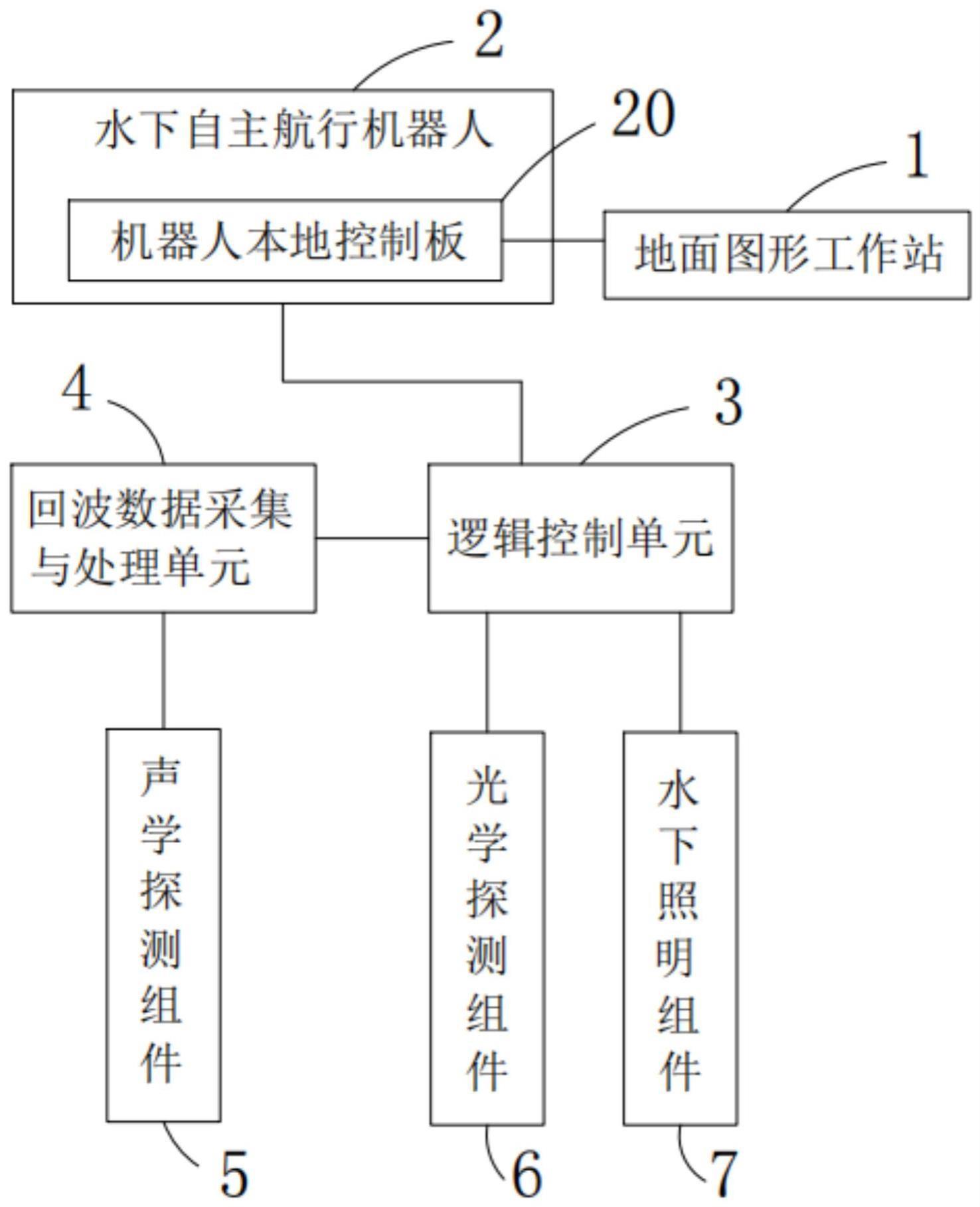
3、一种引水隧洞内表面检测装置,包括:
4、地面图形工作站;
5、水下自主航行机器人,与所述地面图形工作站通信连接;
6、逻辑控制单元,设置在所述水下自主航行机器人内部且与水下自主航行机器人通信连接;
7、回波数据采集与处理单元,设置在所述水下自主航行机器人内部且与所述逻辑控制单元连接;
8、声学探测组件,设置在所述水下自主航行机器人上且与所述回波数据采集与处理单元连接;
9、光学探测组件,设置在所述水下自主航行机器人上且与所述逻辑控制单元电连接;
10、水下照明组件,设置在所述水下自主航行机器人上且与所述逻辑控制单元连接。
11、进一步的,所述水下自主航行机器人包括机器人本地控制板,所述机器人本地控制板同时与所述地面图形工作站和逻辑控制单元通信连接。
12、进一步的,所述声学探测组件包括多个与所述回波数据采集与处理单元连接的多波束成像声呐,所述多波束成像声呐的检测方向垂直于所述水下自主航行机器人的航行方向,且多个多波束成像声呐可实现对引水隧洞内部待检测表面进行360°环形声学探测。
13、进一步的,所述回波数据采集与处理单元为基于fpga的阵列信号采集与处理系统用于采集与处理引水隧洞内部待检测表面反射的回波信号。
14、进一步的,所述光学探测组件为防水型无畸变广角深水仿鱼眼摄像机,其前视角度范围可覆盖引水隧洞内部待检测表面。
15、进一步的,所述水下照明组件包括多个与所述逻辑控制单元连接的防水深水照明灯,多个防水深水照明灯周向布置水下自主航行机器人的前端。
16、一种如上述的引水隧洞内表面检测装置的检测方法,包括以下步骤:
17、根据引水隧洞内水体环境、隧洞物理尺寸设置水下自主航行机器人的运行参数;
18、设置水下自主航行机器人的工作模式,根据对应的工作模式实现引水隧洞内部待检测表面的可视化。
19、进一步的,所述工作模式包括声学成像检测模式、光学成像检测模式以及混合成像检测模式。
20、进一步的,所述声学成像检测模式具体包括以下步骤:
21、设备启动:启动声学探测组件,通过声学探测组件对引水隧洞内部待检测表面发射声波;
22、回波数据采集:通过回波数据采集与处理单元不断接收引水隧洞内部待检测表面反射的回波数据;
23、回波数据去噪:通过回波数据采集与处理单元对回波数据进行去噪处理,滤除直达波信号、高次回波信号及水体离群噪声,保留隧洞实际回波区域点云数据;
24、最优回波提取:通过回波数据采集与处理单元对隧洞实际回波区域点云数据使用最优回波提取算法,提取引水隧洞内部待检测表面最优回波位置数据,得到隧洞内部截面点云数据;
25、载体坐标及姿态信息读取:通过地面图形工作站读取的水下自主航行机器人坐标及姿态信息;
26、数据校正与拼接:地面图形工作站根据水下自主航行机器人坐标及姿态信息,对隧洞内部截面点云数据进行数据校准与拼接;
27、隧洞数据可视化:地面图形工作站根据校准与拼接后的隧洞内部截面点云数据实现引水隧洞内部待检测表面的可视化。
28、进一步的,所述光学成像检测模式具体包括以下步骤:
29、设备启动:启动光学探测组件和水下照明组件;
30、环形光源调节:根据光学探测组件返回的实时画面,通过逻辑控制单元调节水下照明组件的照明亮度,使光学探测组件返回的实时画面清晰最大化;
31、视频数据采集:光学探测组件对引水隧洞内部待检测表面进行数据采集与存储,并实时传输至地面图形工作站;
32、载体坐标及姿态信息读取:通过地面图形工作站读取的水下自主航行机器人坐标及姿态信息;
33、视频数据校正与拼接:地面图形工作站根据水下自主航行机器人坐标及姿态信息,对视频数据进行校正与拼接;
34、隧洞数据可视化:地面图形工作站根据校正与拼接后视频数据实现引水隧洞内部待检测表面的可视化。
35、相比于现有技术,本发明的优点在于:
36、1、本发明填补了目前长距离引水隧洞运行期间内部表面的自动化、智能化检测技术的空白,代替了传统人工排空方式监测维护带来的损坏内壁压力平衡、检测效率主观性强、效率低下、对隧洞的微型变形无法捕捉以及现有检测技术不能满足不同隧洞水文环境的问题。以声、光检测结合的方式,适用于不同长距离引水隧洞的水文环境,将该监测技术与装置应用于长距离引水隧洞的成像检测,大大提高巡检效率,促进工程运行期的监测技术的提高。
技术特征:
1.一种引水隧洞内表面检测装置,其特征在于,包括:
2.根据权利要求1所述的引水隧洞内表面检测装置,其特征在于,所述水下自主航行机器人(2)包括机器人本地控制板(20),所述机器人本地控制板(20)同时与所述地面图形工作站(1)和逻辑控制单元(3)通信连接。
3.根据权利要求1所述的引水隧洞内表面检测装置,其特征在于,所述声学探测组件(5)包括多个与所述回波数据采集与处理单元(4)连接的多波束成像声呐(50),所述多波束成像声呐(50)的检测方向垂直于所述水下自主航行机器人(2)的航行方向(x),且多个多波束成像声呐(50)可实现对引水隧洞内部待检测表面(8)进行360°环形声学探测。
4.根据权利要求1所述的引水隧洞内表面检测装置,其特征在于,所述回波数据采集与处理单元(4)为基于fpga的阵列信号采集与处理系统用于采集与处理引水隧洞内部待检测表面(8)反射的回波信号。
5.根据权利要求1所述的引水隧洞内表面检测装置,其特征在于,所述光学探测组件(6)为防水型无畸变广角深水仿鱼眼摄像机,其前视角度范围可覆盖引水隧洞内部待检测表面(8)。
6.根据权利要求1所述的引水隧洞内表面检测装置,其特征在于,所述水下照明组件(7)包括多个与所述逻辑控制单元(3)连接的防水深水照明灯(70),多个防水深水照明灯(70)周向布置水下自主航行机器人(2)的前端。
7.一种如权利要求1-6任一项所述的引水隧洞内表面检测装置的检测方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的检测方法,其特征在于,所述工作模式包括声学成像检测模式、光学成像检测模式以及混合成像检测模式。
9.根据权利要求8所述的检测方法,其特征在于,所述声学成像检测模式具体包括以下步骤:
10.根据权利要求8所述的检测方法,其特征在于,所述光学成像检测模式具体包括以下步骤:
技术总结
本发明公开了一种引水隧洞内表面检测装置和方法,包括地面图形工作站、声学探测组件、光学探测组件、水下照明组件、与所述地面图形工作站通信连接的水下自主航行机器人、与水下自主航行机器人通信连接的逻辑控制单元以及与所述逻辑控制单元连接的回波数据采集与处理单元;声学探测组件设置在所述水下自主航行机器人上且与所述回波数据采集与处理单元连接;光学探测组件设置在所述水下自主航行机器人上且与所述逻辑控制单元电连接;水下照明组件设置在所述水下自主航行机器人上且与所述逻辑控制单元连接。本发明解决了现有引水隧洞内表面监测领域中人工检测造成的损坏内壁压力平衡、检测效率低、对隧洞的微型变形无法捕捉的技术问题。
技术研发人员:王吉松,张仲英,魏世峰
受保护的技术使用者:慧芯加(苏州)智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!