一种基于波束幅度预分选的实时比幅测向方法及系统与流程
本发明属于波束幅度近似估计以及比幅测向,特别是涉及一种基于波束幅度预分选的实时比幅测向方法及系统。
背景技术:
1、随着科学技术的进步和电子侦察手段的迅速发展,在当前错综复杂的电磁环境中,dbf侦测系统在技术侦察领域中的应用越来越广泛,作用越来越重要。同时,由于宽带阵列技术的不断发展,天线阵阵列数目变得越来越多,实现低硬件资源消耗率及高速信号检测速率同时兼顾变得尤为重要。
2、现有的全波束侦察通常每个波束都要进行信号检测,在降低数据处理效率的同时浪费了大量硬件资源。另外,对目标信号的测向输出由部署在上位机的分选软件完成,从前端信号接收到最终目标信号的测向方位的输出延时较大,无法满足对目标信号的实时引导干扰测向要求。因此在不增加硬件资源的同时提升数据处理速率以及提升目标信号测向输出的实时性显得越来越迫切。
3、中国专利cn104459609b公开了一种基于相控阵雷达的高精度快速实时测向方法,先用和波束进行粗测向,进一步调用差波束分阶段分步进实时调整差波束指向,使差波束指向与零深方位快速重合完成测向,该方法存在的问题为需要先粗测向,再利用差波束不断对零深方位进行逼近,耗时较长。中国专利cn113866709a公开了一种相控阵列交叉多波束比幅测向方法,主要应用数字相位加权及模拟相位加权进行交叉多波束比幅测向,该方法存在的问题为需要建立阵列模型并借助压副瓣天线,计算量大,耗时长,且未涉及波束幅度预分选。西南电子技术研究所刘红提出的dbf和差波束测向设计与实现,主要采用和波束与差波束结合的方式进行测向,该方法存在的问题为需要计算和差波束相位,并利用fpga与dsp共同实现测向,计算量与资源消耗量较大,实时性不高。
4、一种基于波束幅度预分选的实时比幅测向方法,利用iq数据对波束模值进行估计预分选,进而对波束幅度差进行量化寻址。该技术在提升数据处理速率的同时可大大减少fpga硬件资源消耗量。因此,该技术对技术侦察领域dbf阵列系统功能拓展具有重要意义。
技术实现思路
1、本发明目的在于上述背景技术中提出的问题,提出一种基于波束幅度预分选的实时比幅测向方法及系统,利用iq数据对波束模值进行估计预分选,进而对波束幅度差进行量化寻址。该技术只对模值最大波束进行信号检测,在提升数据处理速率的同时可大大减少fpga硬件资源消耗量,目标信号实时测向方为输出小于20us,可用于对目标信号的实时引导干扰。
2、为了实现本发明目的,本发明公开了一种基于波束幅度预分选的实时比幅测向方法,包括以下步骤:
3、步骤1、将得到的所有波束幅度进行幅度值估计预分选;
4、步骤2、对步骤1中预分选操作后筛选出的三个最大波束幅度值进行检测;
5、步骤3、在步骤2中选出的三个波束中筛选出幅度最大值波束和次大值波束;
6、步骤4、构建幅度差量化查表模块,对步骤3中得到的最大值波束与次大值波束幅度值进行量化查表,将查表得到的对应量化幅度值作差,输出量化幅度差;
7、步骤5、对面阵方向图进行量化处理,构建方向图查表模块;
8、步骤6、将步骤4中得到的量化幅度差在步骤5生成的方向图中进行方向图查表,输出当前频点的实时测向方位。
9、进一步地,步骤1中,将得到的所有波束幅度进行幅度值估计预分选包括:
10、步骤101、将每个波束的i、q数据转换为无符号数;
11、步骤102、将i、q数据对应的无符号数转换为幅度估计值;
12、步骤103、利用8点总和法对每个波束模值进行过噪声门限检测,筛选出符合检测条件的波束模值,并从中选出最大值;
13、步骤104、以幅度最大值波束的波束号为中心,分别取左右各一个波束,这三个波束即为所有波束中幅度值最大的三个波束;
14、步骤105、将三个波束对应的i、q数据等信息发送给下一级。
15、进一步地,步骤2中,预分选操作后筛选出的三个最大波束幅度值进行检测方法包括:
16、步骤201、利用三个波束的i、q数据计算得出波束检波包络模值的宽度,即脉宽;
17、步骤202、根据脉宽大小确定总和法检测对应点数;
18、步骤203、计算得到三个波束对应的脉冲上升沿幅度值,发送给下一级。
19、进一步地,步骤3中,选出的三个波束中筛选出幅度最大值波束和次大值波束方法包括:
20、步骤301、将步骤2中得到的3个波束幅度值进行比幅;
21、步骤302、筛选出最大值与次大值,发送给下一级。
22、进一步地,步骤4中,构建幅度差量化查表模块,对步骤3中得到的最大值波束与次大值波束幅度值进行量化查表,将查表得到的对应量化幅度值作差,输出量化幅度差包括:
23、步骤401、设定相邻波束幅度差小于60db,在0-60db范围内按照0.25db分辨率进行量化,量化幅度值以二进制数形式生成系数文件;
24、步骤402、将量化得到的二进制系数文件存储于fpga中;
25、步骤403、将筛选比较得到的最大与次大幅度值在步骤402得到的系数文件中分别进行查表操作,分别得到与两个幅度值对应的量化幅度值;
26、步骤404、将步骤403查表得到的幅度最大值量化幅度值与次大值量化幅度值进行作差,得到两者量化幅度差;
27、步骤405、将查表得到的幅度量化差值、波束号、频点等信息发送给下一级。
28、进一步地,步骤5中,对面阵方向图进行量化处理,构建方向图查表模块方法包括:
29、步骤501、在测频6ghz-18ghz范围内,按照50mhz分辨率进行分割,可划分为241个频点;
30、步骤502、对于方向图数据,每个频点在方向图测向±60°范围之内包含32个波束,确定每个波束的幅度最大值及其对应横坐标,该横坐标即为波束中心指向;
31、步骤503、依据仿真得出两个相邻波束中心指向最大差值为20°,对两个相邻波束的中心指向差值按照0.2°分辨率进行划分,则可以划分100个点;将每个波束号进行量化,生成9bit二进制数;
32、步骤504、以第一个波束为例,第一个波束与第二个波束中心指向之间划分有100个点,每个点对应的幅度差为第二个波束在改点的幅度值减去第一个波束的幅度值,将计算得到的100组幅度差生成9bit二进制数;
33、步骤505、按照步骤504,每次以1个波束号递进,依次将每个中心指向区间的幅度差进行量化;
34、步骤506、将各频点对应的32个波束的中心指向分别进行量化,生成10bit二进制数;
35、步骤507、将各频点波束对应的的方向图幅度差量化值、波束号量化值及波束中心指向量化值均进行整合,生成二进制系数文件;
36、步骤508,将步骤507中量化得到的方向图系数文件存储于fpga中。
37、进一步地,步骤6中,将步骤4中得到的量化幅度差在步骤5生成的方向图中进行方向图查表,输出当前频点的实时测向方位的方法包括:
38、步骤601、对当前中心频点第一个波束进行寻址;
39、步骤602、在步骤601基础上,根据接收到的波束号对当前波束进行寻址;
40、步骤603、读取602中波束对应地址内部的量化幅度差及波束中心指向;
41、步骤604、步骤4中得到的量化幅度差与步骤603中读取的幅度差进行比较,锁定幅度区间后,取区间左值;
42、步骤605、根据步骤604中区间左值及当前波束中心指向计算并输出当前信号实际测向方位量化值。
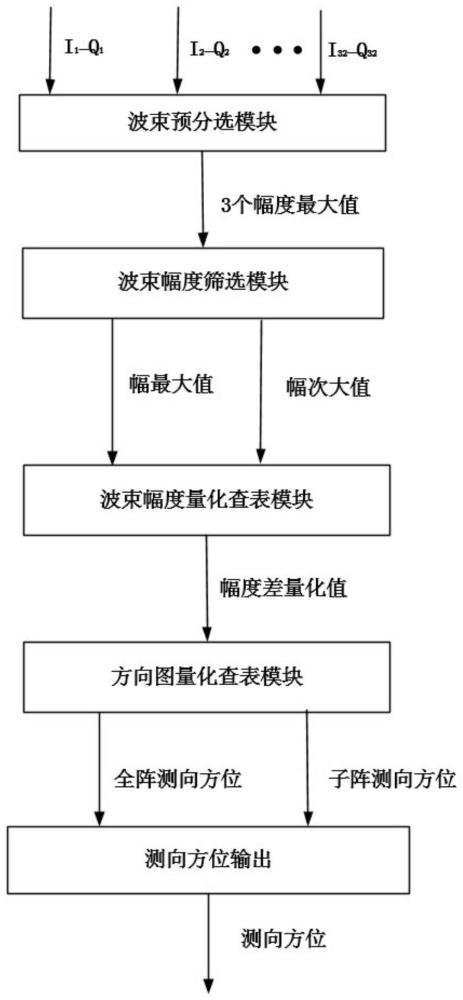
43、为了实现本发明的目的,本发明还公开了一种基于波束幅度预分选的实时比幅测向系统,包括以下模块:
44、波束预分选模块,将得到的所有波束幅度进行幅度值估计预分选;
45、波束幅度值检测模块,对预分选模块中预分选操作后筛选出的三个最大波束幅度值进行检测;
46、波束幅度筛选模块,在幅度值检测模块中选出的三个波束中筛选出幅度最大值波束和次大值波束;
47、波束幅度量化查表模块,对筛选模块中得到的最大值波束与次大值波束幅度值进行量化查表,将查表得到的对应量化幅度值作差,输出量化幅度差;
48、波束幅度量化处理模块,对面阵方向图进行量化处理,构建方向图量化查表模块;
49、方向图量化查表模块,将步骤幅度差量化查表模块中得到的量化幅度差在量化处理模块中生成的方向图中进行方向图查表,输出当前频点的实时测向方位。
50、与现有技术相比,本发明的显著进步在于:本方法只对模值最大波束进行信号检测,在提升数据处理速率的同时可大大减少fpga硬件资源消耗量,目标信号实时测向方位输出小于20us,同时解决了硬件资源消耗率与检测速率不能兼顾的难题。
51、为更清楚说明本发明的功能特性以及结构参数,下面结合附图及具体实施方式进一步说明。
- 还没有人留言评论。精彩留言会获得点赞!