确定移动方向与传感器行进方向间的失准角进行航位推算的制作方法
本公开涉及使用微机电系统(mems)传感器的交通工具和行人航位推算。
背景技术:
1、随着移动设备变得越来越普及,用户的期望不断扩展。许多用户经常使用诸如目前设备上可用的地图应用程序之类的基于位置的应用程序,目前设备诸如蜂窝电话、平板电脑和交通工具中安装的信息娱乐系统。用户在驾驶或步行时访问位置以帮助他们导航他们所在的地方和他们要去的地方。通常的移动设备包括mems传感器和全球导航卫星系统(gnss)等以检测用户的位置。例如,mems传感器包括加速度计和陀螺仪。加速度计用于测量加速度(或速度变化率)。陀螺仪用于测量角速度。移动设备在显示屏上的地图上显示用户在空间中的位置。
2、然而,当用户进入gps/gnss信号弱、信号受干扰或不可用的地方时,利用移动设备检测到的用户位置变得不准确或不可用。正因如此,移动设备不再准确地显示用户的位置。附加地,通过使用先前确定的位置(例如,通过使用gps/gnss传感器)来计算当前位置并基于该位置的估计速度前进的常规航位推算方法不够准确。
技术实现思路
1、由于常规导航系统和常规航位推算方法中的这些缺点,提供了准确分析用户的位置的改进的设备和方法,该设备和方法在gps/gnss信号不够强或不可用时尤其有益。
2、本公开提供了一种方法和系统,以适应当用户期望准确的位置信息但没有清晰的路径来接收诸如gnss和gps信号之类的卫星信号时的情况。针对gps或gnss信号的这些盲区有时被称为城市峡谷,该处的高建筑物和其他障碍物阻止了一致或强烈的信号。在我们当前的共享乘车世界中,共享乘车应用程序将驾驶员的位置共享给乘车人,然而,当驾驶员进入车库、隧道或城市峡谷时,驾驶员的实际位置可能会被中断,并且然后与乘车人共享的数据不准确并且可能是令人困惑的。
3、行人也定期使用地图应用程序。当某人不熟悉特定的城市或社区时,许多人会访问他们的地图应用程序以帮助获取方向,并且然后在跟随这些方向时主动与地图进行交互。这是用户在步行、在交通工具中驾驶或乘车时访问的东西。用户对他们的地图应用程序要求较高准确度。本公开提供了用于关于用户的更准确的位置信息的解决方案。
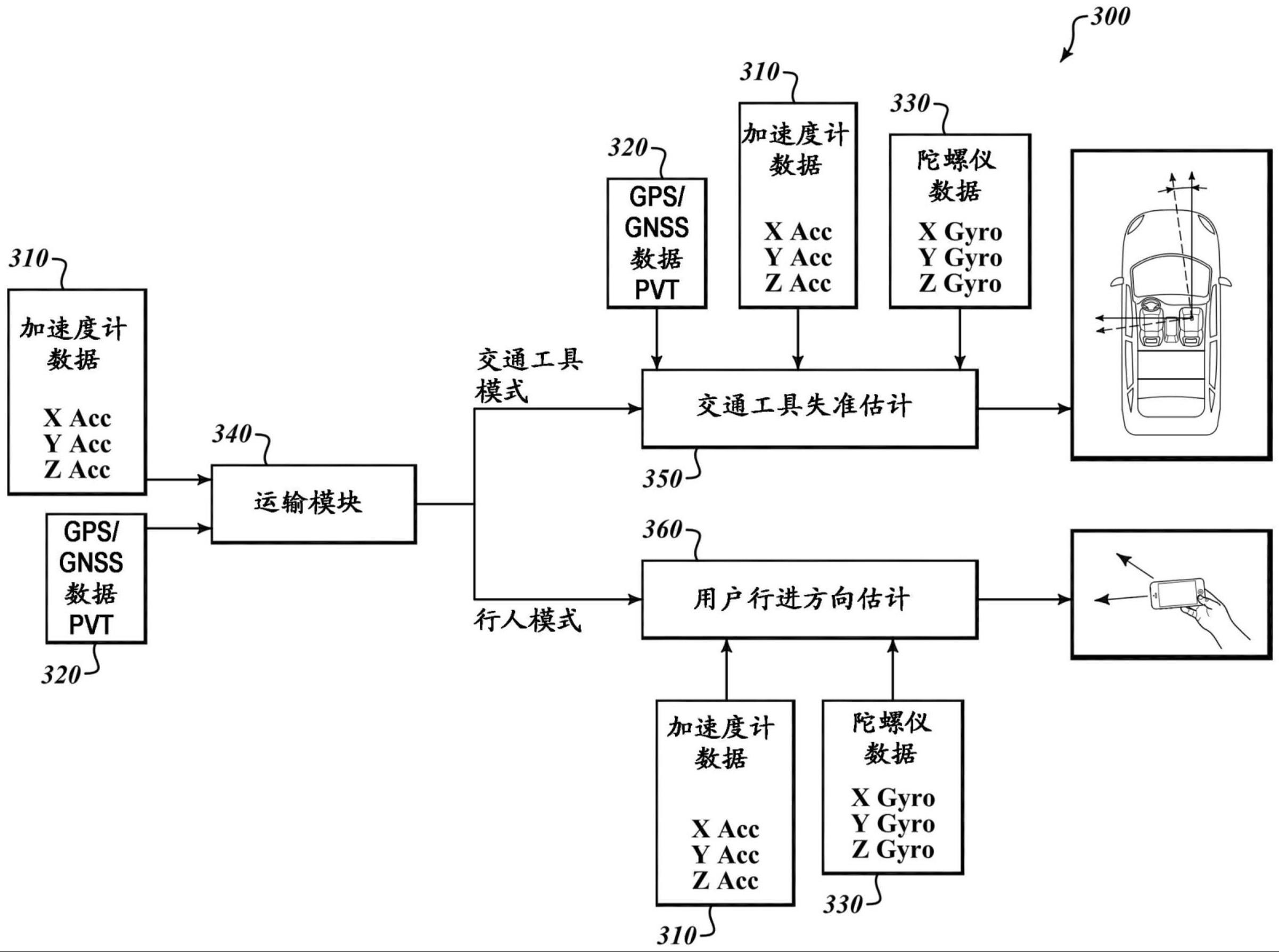
4、特别地,本公开识别了在交通工具模式与行人模式之间的差异。例如,移动设备中的传感器提供经处理以确定用户是在汽车中还是在步行的数据。一旦确定了模式,本公开提供了一种方法,该方法用于确定针对交通工具模式的在交通工具参考系与设备参考系之间的失准角或针对行人模式的设备参考系与用户的移动方向之间的失准角。
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,其中还基于gps数据确定第一模式和第二模式。
3.根据权利要求1所述的方法,其中还基于所述设备的存储器中的预存储库选择所述第一模式和所述第二模式中的一个模式,所述预存储库包括与交通工具和行人的运动相关联的加速度计数据和陀螺仪数据。
4.一种方法,包括:
5.根据权利要求4所述的方法,其中基于所述设备的所述水平加速度分量和所述竖直加速度分量以及所述用户的所述运动状态来计算失准角包括:
6.根据权利要求5所述的方法,还包括:
7.一种方法,包括:
8.根据权利要求7所述的方法,其中,分析加速度计数据包括:
9.根据权利要求8所述的方法,其中确定失准角包括:
10.根据权利要求9所述的方法,其中应用正交轴计算包括:
技术总结
本公开的各实施例涉及确定移动方向与传感器行进方向间的失准角进行航位推算。本公开的各实施例涉及包括微机电系统(MEMS)传感器的设备用于在丢失全球定位系统(GPS)信号或全球导航卫星系统(GNSS)信号的情况下进行航位推算。通过使用诸如加速度计和陀螺仪的MEMS传感器,该设备能够在丢失GPS/GNSS信号之后跟踪设备的位置。通过使用MEMS传感器计算在设备的传感器参考系与交通工具的移动方向或行人的步行方向之间的失准角,即使在没有GPS/GNSS信号的情况下,设备也可以准确地计算设备的用户的位置。因此,可以提供一种设备,该设备能够在不利用GPS/GNSS信号的情况下跟踪行人和在交通工具中驾驶的用户的位置。
技术研发人员:M·简恩,M·乔达里
受保护的技术使用者:意法半导体公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!