一种雷达飞行目标实时跟踪的方法和系统与流程
本发明涉及雷达跟踪,具体的说,是一种雷达飞行目标实时跟踪的方法和系统。
背景技术:
1、使用连续波雷达的回波数据实时的进行多个飞行目标的运动跟踪并且进行目标运动航迹的管理是多目标跟踪技术里最根本和最核心的任务。飞行目标跟踪任务核心就是确认数据里的真实目标,并且为其建立运动航迹。流程一般分为航迹起始、航迹筛选、航迹维持和航迹剔除等。航迹起始,具体指的是在目标跟踪系统还没确定目标进行稳定的运动跟踪之前所进行的初始航迹建立过程。而航迹筛选指的是使用一定的规则或者算法对已经建立的航迹进行可靠性判断和筛选,剔除不合理的异常航迹。航迹维持指的是在实时的目标跟踪的过程中,把雷达每个周期接收到的点迹数据和已经建立的航迹进行匹配,更新航迹信息得到最新的目标航迹,航迹维持过程一般涉及到目标运动状态的描述和数据匹配算法的选择。航迹剔除指的是当目标飞出雷达探测距离或者长时间停止运动或者雷达跟踪丢失超过一定时间时,对应的航迹也需要进行删除,从而保证目标跟踪结果的准确性和跟踪速度的实时性。
2、传统的航迹起始方法按照不同的数据处理方式可以分为顺序处理方法和批处理方法,顺序处理方法包括逻辑法、启发式规则法等;批处理方法包括hough变换及其变种算法。顺序处理法优点是计算量小运算速度快,缺点是建立正确航迹的效果一般,由于顺序处理方法本身无法区分杂波,如果杂波增加,就会直接干扰航迹的形成,因此该方法通常适用于弱杂波的检测环境;而批处理法计算量大运算耗时长,有着不错的效果可以用于强杂波的检测环境。
3、传统的航迹筛选方法包括逻辑法和规则法,一般和航迹起始的逻辑法、规则法相同,因此在一部分经典的目标跟踪框架里,航迹起始过程和航迹筛选过程一般合并为航迹起始过程。
4、航迹维持过程包括航迹匹配和目标运动学模拟。对于目标的运动学模拟,传统的方法是使用卡尔曼滤波族(经典卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波等),近几年的方法有交互式多模型(imm,interacting multiple model)、伯努利族滤波(例如,pmbm(泊松多伯努利混合滤波),δ-glmb(δ-广义标签多伯努利滤波)等)。传统的卡尔曼滤波优势在于运算速度快;而交互式多模型以及伯努利滤波族则能适应更复杂的运动情况,但是这两类方法都需要提前设置大量参数,使用起来并不方便。经典的航迹匹配算法(又叫做数据关联算法)有最近邻关联(nn,nearest neighbour)、全局最近邻关联(gnn,global nearestneighbour)、概率关联(pda,probabilistic data association)、联合概率关联(jpda,joint probabilistic data association)、多假设跟踪(mht,multiple hypothesistracking)和动态规划等。最近邻类型的跟踪算法计算速度快但是效果一般;而概率关联类跟踪算法和多假设类跟踪算法的效果更好,但是更复杂,耗时较久或者无法求解。
5、现代雷达对飞行目标的跟踪环境变得日益严峻,一方面客观环境里强杂波环境变得普遍,同时空间里的各类目标(例如鸟类、多旋翼无人机、固定翼无人机以及普通小型飞机等)也日益增加,这些都增加了跟踪难度;另一方面目前的应用场景对目标跟踪的速度和精度的要求也越来越高,因此传统的飞行目标跟踪方案越来越难以满足要求。目标跟踪领域目前虽然有一些方法也初步使用了深度学习模型在一部分任务上,但是这些方法在实际应用过程中依然面临很多问题,总结起来有以下几点:
6、1.目前雷达检测都面临着复杂的强杂波环境,在面对大量的回波数据时,传统的飞行目标跟踪方法(例如jpda、mht等)会出现运算量太大从而跟踪速度下降的问题;
7、2.目前基于规则的航迹起始方法效果较为一般,而基于深度学习的航迹起始方法所用的特征是由人工设计的,具有局限性;同时深度学习模型也没有利用目标运动数据的时序性特征,导致不能很好的学习出目标的运动特性,不适用于具有复杂运动特性的目标,跟踪精度不高。
技术实现思路
1、本发明的目的在于提供一种雷达飞行目标实时跟踪的方法和系统,用于解决现有技术中雷达执行多飞行目标跟踪任务时强杂波环境跟踪速度下降以及基于深度学习的航迹起始方法所用的特征是由人工设计的,具有局限性;同时也没有利用目标运动数据的时序性特征导致跟踪精度不高的问题。
2、本发明通过下述技术方案解决上述问题:
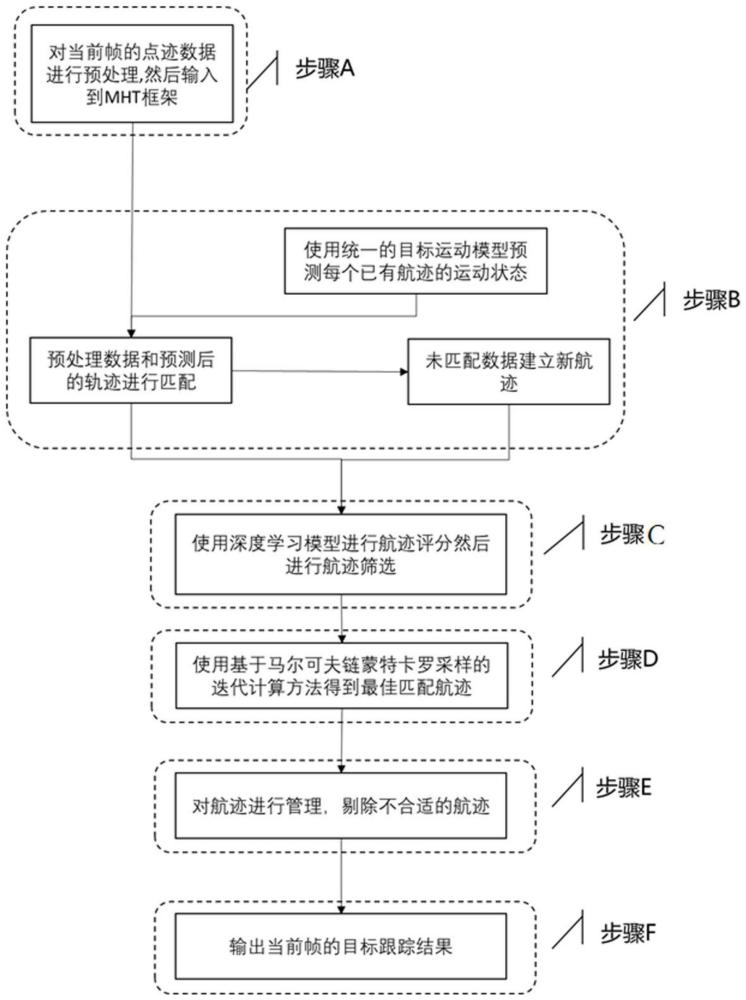
3、一种雷达飞行目标实时跟踪的方法,包括:
4、步骤a、接收雷达当前帧的回波点迹数据,并进行预处理;
5、步骤b、预测每个已经建立的目标航迹的运动状态,使用预测的结果和预处理后的数据进行航迹匹配,并对未匹配的数据建立新的目标航迹;
6、步骤c、采用深度学习评分模型对当前所有的航迹进行评分,对评分低于阈值的航迹进行剔除;
7、步骤d、使用基于马尔可夫链蒙特卡罗采样的方法迭代计算出多假设框架里的最佳假设航迹;
8、步骤e、根据得到的最佳假设航迹对现有的假设航迹进行管理;
9、步骤f、对目标跟踪结果进行后处理,输出当前的目标跟踪结果。
10、进一步地,所述步骤a中的预处理包括对雷达杂波点迹进行剔除和对分裂的雷达点迹数据进行凝聚。
11、进一步地,所述预测每个已经建立的目标航迹的运动状态具体包括:
12、从目标航迹当前时间点的前一个时间点开始往前n个时间点所构成的航迹片段的坐标构成的序列数据;
13、从序列数据提取特征得到特征向量;
14、把特征向量进行编码得到编码向量,将编码向量和特征向量进行空间信息编码得到空间信息向量,再将编码向量和空间信息向量一起解码得到预测结果,即目标航迹在当前时刻的位置坐标。
15、进一步地,所述预测每个已经建立的目标航迹的运动状态由特征提取模块和目标运动模型完成,其中:
16、特征提取模块,用于从序列数据提取特征向量;
17、目标运动模型由特征编码模块、解码模块和空间感知模块组成,特征编码模块用于将特征向量编码得到编码向量,空间感知模块用于将编码向量和特征向量进行空间信息编码得到空间信息向量,解码模块用于将空间信息向量和编码向量一起解码得到预测结果。
18、进一步地,所述特征编码模块和解码模块分别由堆叠了多层的transformer构成,空间感知模块由全连接层、3d稀疏卷积层和softmax层堆叠而成。
19、进一步地,所述使用预测的结果和预处理后的数据进行航迹匹配为:把预测结果和当前时间点的预处理数据采用波门法进行匹配,在每个时间节点分配波门法成功匹配到的点迹数据给已经建立的目标航迹,目标航迹和回波数据关联的过程就是在对目标航迹进行更新,从而更新该目标航迹的状态。波门形状为矩形或者椭圆形,波门距离采用欧氏距离或者mahalanobis距离。
20、进一步地,所述深度学习评分模型由全连接层、卷积层和softmax层堆叠而成,输入数据是每个目标航迹从当前时间点开始的前n个时间点的特征数据构成的序列数据,目标航迹在每个时间点的特征数据由目标在当前时间点的三维坐标、信噪比、回波幅度、速度和加速度组成。
21、进一步地,所述基于马尔可夫链蒙特卡罗采样的方法具体包括马尔科夫链的构造和目标假设航迹采样分布的构造,通过马尔可夫链蒙特卡罗采样得到每个假设航迹的最佳度评分,再筛选出最佳度评分大于阈值的假设航迹。
22、进一步地,所述步骤e中对现有的假设航迹进行管理包括:假设航迹状态信息更新、删除连续缺失值超过阈值的假设航迹、删除假设树里超过阈值数量的假设航迹。
23、进一步地,所述步骤f中的目标跟踪结果由目标起点时刻的坐标到当前时刻的所有坐标构成的航迹序列。
24、一种雷达飞行目标实时跟踪的系统,包括:
25、点迹数据预处理模块,用于对连续波雷达的回波数据进行预处理,预处理包括剔除杂波和对分裂的点迹数据进行凝聚;
26、假设树模块,用于将从同一个起点出发的所有航迹构成一棵假设树,假设树记录了航迹的坐标、航迹编号、评分、长度、缺失点数量和最大连续缺失值;
27、特征提取模块,用于输入目标航迹从当时间节点的前一个时间节点开始往前n个时间节点的三维坐标所构成的序列数据,提取航迹的运动学特征向量;
28、目标运动模型,由特征编码模块、解码模块和空间感知模块组成,用于输入提取的运动学特征向量,输出预测的目标航迹在当前时刻的位置坐标;
29、航迹匹配模块,使用波门法将目标航迹和预处理后的数据中当前时间点接收到的所有回波数据进行匹配,目标航迹和落在波门里的所有回波数据分别建立新的航迹;目标航迹和回波数据关联的过程就是在对目标航迹进行更新。如果形成了多条新航迹,就在下个时刻都进行更新;
30、新航迹起始模块,用于将未能匹配的预处理后的数据根据mht跟踪框架的规则建立新的航迹树和航迹。
31、航迹评分特征提取模块,用于从目标航迹的历史数据里提取航迹评分特征,历史数据包括坐标、回波幅度、信噪比和通过历史数据构建的计算量;
32、深度学习评分模型,用于输入航迹评分特征,输出航迹的评分值;
33、马尔可夫链蒙特卡罗采样模块,用于通过mcmc采样算法或者gibbs采样算法迭代计算出当前所有的假设目标航迹的最佳度评分;
34、航迹管理模块,用于对现有航迹进行管理,包括更新航迹的状态信息、删除连续缺失值超过阈值的目标航迹一级删除假设树里超过阈值数量的假设航迹;
35、目标跟踪结果输出模块,从目标航迹信息里提取出航迹的历史坐标序列和对应航迹编号,然后输出到显示端。
36、本发明与现有技术相比,具有以下优点及有益效果:
37、(1)本发明面对带有强杂波的环境,能够从接收到的雷达回波点迹数据中寻找到目标,对其中目标的进行实时跟踪,同时给出跟踪目标的实时航迹信息;面对数据量比较大的情况,有更快的跟踪速度;通过评估目标航迹的合理程度,提高了目标航迹的准确性,同时也减少了假设航迹数目提高了跟踪速度。
38、(2)本发明适应强杂波环境,能很好的捕捉到的该环境下的飞行目标并进行持续跟踪。
39、(3)本发明使用单独的基于transformer的目标运动模型预测所有目标航迹,不必为每个目标单独建立模型,减少了参数量并且提高了准确率。
- 还没有人留言评论。精彩留言会获得点赞!