一种基于涡流卷积核的裂纹快速定位方法
本发明属于裂纹定位,具体涉及一种基于涡流卷积核的裂纹快速定位方法。
背景技术:
1、缺陷定量评价是利用涡流检测结果评价元器件状态的关键指标,缺陷定量评价的信息通常包括缺陷位置、几何形状和物理参数。因此,缺陷信息是多维信息,采用传统的基于物理模型的优化算法,需要严格的计算资源和时间。然而,基于深度学习方法的缺陷信息检索方法需要大量的训练数据。现有技术并未应用检测系统的已知物理场信息,反演效率较低,不能减少缺陷定量评估所需的时间和硬件资源。
2、分形涡流传感器在检测各个方向的短裂纹方面具有很高的一致性和较低的漏检率。然而,此类传感器的c扫描信号超过噪声阈值的区域远大于裂缝尺寸。因此,传统方法难以评估裂纹信息,而涡流检测的裂纹检测是基于涡流与裂纹的相互作用,因此,分形涡流传感器c扫描信号的形状与裂纹的形貌和涡流场的分布直接相关。
技术实现思路
1、本发明提供了一种基于涡流卷积核的裂纹快速定位方法,解决了裂纹定位基于深度学习的缺陷信息检索需要花费大量时间以及分形涡流传感器难以评估裂纹信息的问题。
2、为了解决上述技术问题,本发明的技术方案为:一种基于涡流卷积核的裂纹快速定位方法,包括以下步骤:
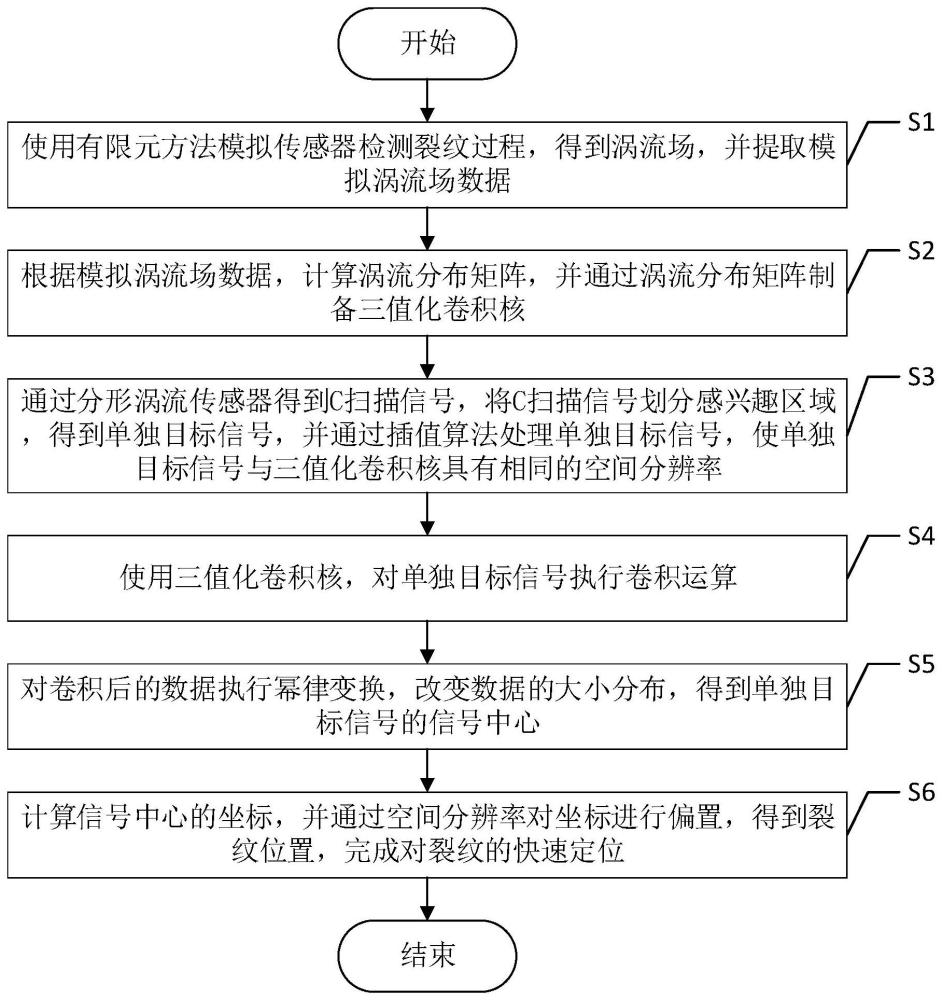
3、s1、使用有限元方法模拟传感器检测裂纹过程,得到涡流场,并提取模拟涡流场数据;
4、s2、根据模拟涡流场数据,计算涡流分布矩阵,并通过涡流分布矩阵构建三值化卷积核;
5、s3、通过分形涡流传感器得到c扫描信号,将c扫描信号划分感兴趣区域,得到单独目标信号,并通过插值算法处理单独目标信号,使单独目标信号与三值化卷积核具有相同的空间分辨率;
6、s4、使用三值化卷积核,对单独目标信号进行卷积运算;
7、s5、对卷积后的数据进行幂律变换,改变数据的大小分布,得到单独目标信号的信号中心;
8、s6、计算信号中心的坐标,并通过空间分辨率对坐标进行偏置,得到裂纹位置,完成对裂纹的快速定位。
9、本发明的有益效果是:通过涡流场数据准备三值化卷积核,对c扫描信号进行处理,得到单独目标信号,然后使用三值化卷积核对单独目标信号进行卷积,能够完成对裂纹定量识别的快速定位,并且本发明不需要和机器学习一样需要训练集,可以处理单个c扫描信号,能够提高裂纹定位的速度,并且通过涡流分布矩阵构建卷积核,解决了裂纹定位基于深度学习的缺陷信息检索需要花费大量时间以及分形涡流传感器难以评估裂纹信息的问题。
10、进一步地,所述步骤s2的具体步骤为:
11、s21、根据模拟涡流场数据,利用有限元仿真计算涡流分布,并计算涡流分布矩阵;
12、s22、将涡流分布矩阵依次进行归一化和二值化,得到涡流场二值化卷积核;
13、s23、对涡流场二值化卷积核进行三值化,得到三值化卷积核。
14、进一步地,所述步骤s21中涡流分布矩阵的表达式为:
15、
16、其中,j表示涡流分布矩阵,r表示涡流分布的实部信号,i表示涡流分布的虚部信号;
17、所述步骤s22中涡流场二值化卷积核的表达式为:
18、
19、其中,jb[m,n]表示二值化卷积核的第m行第n列元素,j[m,n]表示归一化后的涡流分布矩阵的第m行第n列元素,max(j)表示涡流分布矩阵j的最大值;
20、所述步骤s23中三值化卷积核的表达式为:
21、
22、其中,jz[m,n]表示三值化卷积核的第m行第n列元素,m表示三值化卷积核jz矩阵的行数与列数。
23、上述进一步方案的有益效果为:本发明构建的三值化卷积核有反对称结构,三值化卷积核的正负两半可以抵消随机噪声,而裂纹信号也具有近似的反对称结构,当三值化卷积核与裂纹信号重叠且两者的正负部分分别重叠时,可以增强信号。
24、进一步地,所述步骤s3的具体步骤为:
25、s31、将c扫描信号矩阵沿扫描方向进行去趋势处理,得到去趋势信号;
26、s32、将去趋势信号进行坐标旋转;
27、s33、对旋转后的信号划分感兴趣区域,得到单独目标信号;
28、s34、通过插值算法处理单独目标信号,得到单独目标信号的实际数据分布,使单独目标信号与三值化卷积核具有相同的空间分辨率。
29、上述进一步方案的有益效果为:利用插值方法,将c扫描信号数据之间的距离补充为真实场景,得到单独目标信号的实际数据分布,使单独目标信号与三值化卷积核具有相同的空间分辨率,以便于利用卷积操作定位目标。
30、进一步地,所述步骤s32中坐标旋转的公式为:
31、sr[p,q]=sr,d[p,q]cosθ+si,d[p,q]sinθ
32、其中,sr[p,q]表示旋转后的信号的第p行第q列元素,sr,d[p,q]表示去趋势信号实部的第p行第q列元素,si,d[p,q]表示去趋势信号虚部的第p行第q列元素,θ表示旋转角度。
33、上述进一步方案的有益效果为:对c扫描信号进行去趋势处理,再对信号的实部和虚部进行坐标旋转,以增强信号的振幅和凸显信号特征。
34、进一步地,所述步骤s33的具体步骤为:
35、a1、使用梯度函数计算旋转后信号的垂直方向的梯度;
36、a2、将梯度进行归一化,并通过一个阈值进行转换,得到二进制图像;
37、a3、分别在两个方向上对二进制图像进行膨胀操作;
38、a4、提取膨胀后的图像的边界,将每个边界的外部矩形作为感兴趣区域,分割出单独目标信号。
39、上述进一步方案的有益效果为:使用梯度函数计算垂直方向的梯度,能够揭示目标信号的变化趋势特征,然后通过阈值进行转换,能够降低噪声,突出目标信号,进行膨胀操作,能够填充目标信号内的间隙,使得目标更加连续完整并强化边缘,提取图像的边界,根据每个信号边界的最小最大坐标定义方框,使用方框在c扫描信号中分割出每个单独目标信号,以此实现数据分割。
40、进一步地,所述步骤a1中梯度的表达式为:
41、
42、其中,g[p,q]表示旋转后信号矩阵的第p行第q列元素的梯度,|·|表示取绝对值,sr[p,q+1]表示旋转后信号矩阵的第p行第q+1列元素,sr[p,q-1]表示旋转后信号矩阵的第p行第q-1列元素,q'表示旋转后信号的数据宽度;
43、所述步骤a3中膨胀操作的公式为:
44、
45、其中,ge表示膨胀后的图像,gb表示二进制图像,表示膨胀操作,sey和sex均表示膨胀操作的线性结构元素。
46、进一步地,所述步骤s4中卷积运算的公式为:
47、cb[r,s]=|si,i*jz|
48、r=1,2,...,r,s=1,2,...,s
49、
50、其中,cb[r,s]表示卷积后的数据矩阵的第r行第s列元素,si,i表示第i个感兴趣区域中的单独目标信号,jz表示三值化卷积核,*表示卷积操作,|·|表示取绝对值,r表示卷积后数据矩阵的宽,s表示卷积后数据矩阵的高,wi表示第i个感兴趣区域中单独目标信号的宽,hi表示第i个感兴趣区域中单独目标信号的高,m表示三值化卷积核jz矩阵的行数与列数。
51、上述进一步方案的有益效果为:使用三值化卷积核对分割后的单独目标信号进行卷积运算,能够实现目标定位。
52、进一步地,所述步骤s5中幂律变换的公式为:
53、cd[p,q]=cp[p,q]τ
54、其中,cd[p,q]表示信号中心矩阵的第p行第q列元素,cp[p,q]表示幂律变换的响应信号,τ表示幂律变换的系数。
55、上述进一步方案的有益效果为:通过对卷积后的数据进行幂律变换,能够改变数据的大小分布,突出信号中心。
56、所述步骤s6中裂纹位置的表达式为:
57、(p,q)=argmax(cd[p,q])
58、
59、其中,(p,q)表示信号中心幅值最大时的位置坐标,argmax(·)表示求取最大位置坐标函数,表示第i个感兴趣区域中裂纹的位置,sd表示单独目标信号的空间分辨率,sk表示三值化卷积核的空间分辨率,ri表示第i个感兴趣区域的右部,ti表示第i个感兴趣区域的顶部。
60、上述进一步方案的有益效果为:计算幂律变换突出的信号中心坐标,再进行偏置,得到裂纹的坐标,完成裂纹定位。
- 还没有人留言评论。精彩留言会获得点赞!